Edge-Efficient Two-Stream Multimodal Architecture for Non-Intrusive Bathroom Fall Detection
Pith reviewed 2026-05-15 09:20 UTC · model grok-4.3
The pith
A two-stream architecture with Motion-Mamba and Impact-Griffin branches plus cross-conditioned fusion detects bathroom falls at 96.1% accuracy while halving latency on Raspberry Pi gateways.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
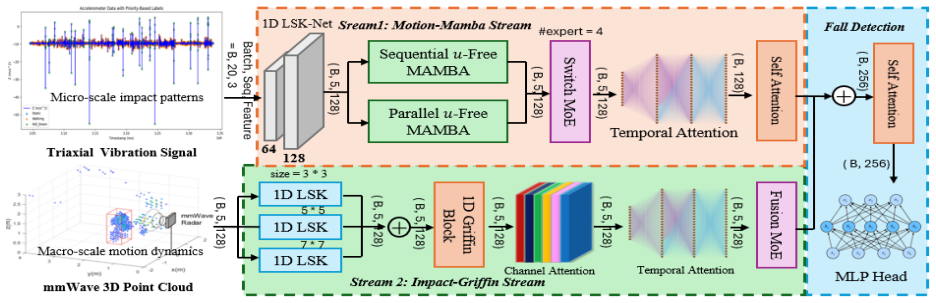
We propose a two-stream architecture that encodes radar signals with a Motion-Mamba branch for long-range motion patterns and processes floor vibration with an Impact-Griffin branch that emphasizes impact transients and cross-axis coupling. Cross-conditioned fusion uses low-rank bilinear interaction and a Switch-MoE head to align motion and impact tokens and suppress object-drop confounders. The model keeps inference cost suitable for real-time execution on a Raspberry Pi 4B gateway.
What carries the argument
The two-stream multimodal architecture consisting of a Motion-Mamba branch for radar motion patterns, an Impact-Griffin branch for vibration transients, and cross-conditioned fusion via low-rank bilinear interaction and Switch-MoE head that aligns the streams while suppressing confounders.
If this is right
- Attains 96.1% accuracy, 94.8% precision, 88.0% recall, 91.1% macro F1, and 0.968 AUC on the test split.
- Improves accuracy by 2.0 percentage points and fall recall by 1.3 percentage points over the strongest baseline.
- Reduces latency from 35.9 ms to 15.8 ms and energy per 2.56 s window from 14200 mJ to 10750 mJ on Raspberry Pi 4B.
- Supports real-time execution on low-power edge gateways while maintaining privacy through non-intrusive sensing.
Where Pith is reading between the lines
- Such a system could integrate into home IoT networks to provide continuous monitoring for elderly residents without requiring wearable devices or visual surveillance.
- Extending the cross-conditioned fusion approach might improve detection in other noisy environments where multiple sensor modalities are available but timing is uncertain.
- Deploying this on similar edge hardware in public restrooms could reduce response times to falls in commercial settings.
Load-bearing premise
The custom dataset of more than 3 hours across eight scenarios under running water with subject-independent splits is representative of real-world bathroom falls and the fusion reliably suppresses object-drop confounders without overfitting to collection artifacts.
What would settle it
Collecting a new test set of actual falls by elderly subjects in uncontrolled bathroom environments with varied water flow and objects, then measuring if accuracy drops below 90% or energy savings disappear.
Figures




read the original abstract
Falls in wet bathroom environments are a major safety risk for seniors living alone. Recent work has shown that mmWave-only, vibration-only, and existing multimodal schemes, such as vibration-triggered radar activation, early feature concatenation, and decision-level score fusion, can support privacy-preserving, non-intrusive fall detection. However, these designs still treat motion and impact as loosely coupled streams, depending on coarse temporal alignment and amplitude thresholds, and do not explicitly encode the causal link between radar-observed collapse and floor impact or address timing drift, object drop confounders, and latency and energy constraints on low-power edge devices. To this end, we propose a two-stream architecture that encodes radar signals with a Motion--Mamba branch for long-range motion patterns and processes floor vibration with an Impact--Griffin branch that emphasizes impact transients and cross-axis coupling. Cross-conditioned fusion uses low-rank bilinear interaction and a Switch--MoE head to align motion and impact tokens and suppress object-drop confounders. The model keeps inference cost suitable for real-time execution on a Raspberry Pi 4B gateway. We construct a bathroom fall detection benchmark dataset with frame-level annotations, comprising more than 3~h of synchronized mmWave radar and triaxial vibration recordings across eight scenarios under running water, together with subject-independent training, validation, and test splits. On the test split, our model attains 96.1% accuracy, 94.8% precision, 88.0% recall, a 91.1% macro F1 score, and an AUC of 0.968. Compared with the strongest baseline, it improves accuracy by 2.0 percentage points and fall recall by 1.3 percentage points, while reducing latency from 35.9 ms to 15.8 ms and lowering energy per 2.56 s window from 14200 mJ to 10750 mJ on the Raspberry Pi 4B gateway.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to introduce an edge-efficient two-stream multimodal architecture for non-intrusive bathroom fall detection. It processes mmWave radar signals via a Motion-Mamba branch for long-range motion patterns and triaxial floor vibration via an Impact-Griffin branch for impact transients, then applies cross-conditioned fusion with low-rank bilinear interaction and a Switch-MoE head to align tokens and suppress object-drop confounders and timing drift. A custom dataset of >3 hours of synchronized recordings across eight scenarios under running water is introduced with subject-independent splits. On the held-out test split the model reports 96.1% accuracy, 94.8% precision, 88.0% recall, 91.1% macro F1, and 0.968 AUC, outperforming the strongest baseline by 2.0 pp accuracy and 1.3 pp fall recall while cutting latency from 35.9 ms to 15.8 ms and energy from 14200 mJ to 10750 mJ per 2.56 s window on a Raspberry Pi 4B.
Significance. If the empirical gains and efficiency numbers hold under proper verification, the work would be significant for privacy-preserving, real-time fall detection on resource-constrained edge hardware in wet environments. The explicit modeling of motion-impact causality via cross-conditioned fusion and the hardware measurements on Raspberry Pi 4B address practical deployment constraints that prior loosely-coupled multimodal schemes have left open.
major comments (3)
- Dataset section: the manuscript provides no subject count, total fall-event counts, or per-split event statistics. Without these numbers it is impossible to assess whether the subject-independent splits are sufficiently powered or representative of real bathroom falls, directly undermining the central claim that the reported 2.0 pp accuracy gain generalizes beyond collection artifacts.
- Experimental evaluation: no ablation is presented that isolates or removes the cross-conditioned fusion path (low-rank bilinear interaction plus Switch-MoE head). The abstract asserts this mechanism suppresses object-drop confounders and timing drift, yet the 1.3 pp recall improvement cannot be attributed to the architecture without such a controlled comparison.
- Methods and results sections: training procedure, hyperparameter search protocol, and any statistical significance testing or error bars on the headline metrics are absent. The soundness of the 96.1% accuracy and efficiency claims on the held-out split therefore rests on unverified implementation details.
minor comments (2)
- Introduction: the original Mamba and Griffin references should be cited at first mention of each module to allow readers to trace the architectural choices.
- Figure captions and architecture diagram: ensure the cross-conditioned fusion block is explicitly labeled with the low-rank bilinear and Switch-MoE components so the data flow is unambiguous.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which highlight important areas for improving the rigor and reproducibility of our manuscript. We address each major point below and will revise the paper to incorporate the requested details.
read point-by-point responses
-
Referee: Dataset section: the manuscript provides no subject count, total fall-event counts, or per-split event statistics. Without these numbers it is impossible to assess whether the subject-independent splits are sufficiently powered or representative of real bathroom falls, directly undermining the central claim that the reported 2.0 pp accuracy gain generalizes beyond collection artifacts.
Authors: We agree that these statistics are necessary to evaluate the splits. The revised manuscript will add a table in the Dataset section reporting the number of subjects, total fall and non-fall events, and per-split breakdowns. This will allow assessment of statistical power and support the generalizability claim. revision: yes
-
Referee: Experimental evaluation: no ablation is presented that isolates or removes the cross-conditioned fusion path (low-rank bilinear interaction plus Switch-MoE head). The abstract asserts this mechanism suppresses object-drop confounders and timing drift, yet the 1.3 pp recall improvement cannot be attributed to the architecture without such a controlled comparison.
Authors: We acknowledge the absence of this ablation. The revision will include an ablation study in the Experimental section that removes the low-rank bilinear interaction and Switch-MoE head, quantifying their isolated contribution to the recall gain and confirming suppression of confounders. revision: yes
-
Referee: Methods and results sections: training procedure, hyperparameter search protocol, and any statistical significance testing or error bars on the headline metrics are absent. The soundness of the 96.1% accuracy and efficiency claims on the held-out split therefore rests on unverified implementation details.
Authors: We agree these details are required for verification. The revised Methods section will describe the full training procedure, hyperparameter search protocol, and report error bars with statistical significance tests on the metrics to substantiate the claims. revision: yes
Circularity Check
No circularity: empirical results on held-out test split
full rationale
The paper proposes a two-stream multimodal architecture and reports performance metrics (96.1% accuracy, etc.) as direct empirical outcomes from training on subject-independent splits of a custom >3h dataset. No derivation chain reduces a claimed prediction or first-principles result to its own inputs by construction, no self-citation load-bearing steps, and no fitted parameters renamed as predictions. The evaluation is framed as standard ML benchmarking against baselines, making the central claims self-contained against external test data.
Axiom & Free-Parameter Ledger
free parameters (2)
- Low-rank dimension and expert routing parameters in fusion head
- Branch-specific hyperparameters in Mamba and Griffin modules
axioms (1)
- domain assumption Cross-conditioned token alignment can capture the causal link between radar-observed collapse and floor impact while handling timing drift and object-drop confounders.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
two-stream architecture that encodes radar signals with a Motion–Mamba branch ... Impact–Griffin branch ... low-rank bilinear interaction and a Switch–MoE head
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanLogicNat induction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Mamba2Block1D ... gated state space recurrence ... GLRU cell
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Kevin McCracken and David R Phillips,Global health: An introduction to current and future trends, Routledge, 2017
work page 2017
-
[2]
Fall risk assessment scales: a systematic literature review,
V . Strini, R. Schiavolin, and A. Prendin, “Fall risk assessment scales: a systematic literature review,”Nurs. Rep., 2021
work page 2021
-
[3]
Elderly fall detection systems: a literature survey,
X. Wang, J. Ellul, and G. Azzopardi, “Elderly fall detection systems: a literature survey,”Front. Robot. AI, 2020
work page 2020
-
[4]
Care needs of the elderly who live alone: an intersectoral perception,
G. P. Cardoso et al., “Care needs of the elderly who live alone: an intersectoral perception,”Rev. Rene, 2020
work page 2020
-
[5]
H. Wang et al., “P2mfds: A privacy-preserving multimodal fall detection system for elderly people in bathroom environments,” inAIoTSys. Springer, 2025
work page 2025
-
[6]
Millimeter-wave radar-based elderly fall detection fed by one-dimensional point cloud and doppler,
C. Kittiyanpunya et al., “Millimeter-wave radar-based elderly fall detection fed by one-dimensional point cloud and doppler,”IEEE Access, 2023
work page 2023
-
[7]
Fall detection system based on lstm-transformer and fmcw radar,
Y . Shen and G. Niu, “Fall detection system based on lstm-transformer and fmcw radar,” inProc. SPIE, 2025
work page 2025
-
[8]
P. Gorce and J. Jacquier-Bret, “Fall detection in elderly people: a systematic review of ambient assisted living and smart home-related technology performance,”Sensors, 2025
work page 2025
-
[9]
High-definition 3d point cloud mapping of the city of subiaco in western australia,
C. Pasa et al., “High-definition 3d point cloud mapping of the city of subiaco in western australia,” inDICTA, 2024
work page 2024
-
[10]
A survey on fall detection: principles and approaches,
M. Mubashir, L. Shao, and L. Seed, “A survey on fall detection: principles and approaches,”Neurocomput., 2013
work page 2013
-
[11]
Challenges, issues and trends in fall detection systems,
R. Igual, C. Medrano, and I. Plaza, “Challenges, issues and trends in fall detection systems,”Biomed. Eng. Online, 2013
work page 2013
-
[12]
Range–doppler radar sensor fusion for fall detection,
Amin M. G. Erol, B. and B. Boashash, “Range–doppler radar sensor fusion for fall detection,” inProc. IEEE Radar Conf., 2017
work page 2017
-
[13]
Smart seismic sensing for indoor fall detection, location, and notification,
J. Clemente et al., “Smart seismic sensing for indoor fall detection, location, and notification,”IEEE J. Biomed. Health Inform., 2020
work page 2020
-
[14]
Feature diversity for fall detection and indoor activities classification using radar systems,
A. Shrestha et al., “Feature diversity for fall detection and indoor activities classification using radar systems,”Radar 2017, 2017
work page 2017
-
[15]
Fall detection using standoff radar-based sensing and deep convolutional neural network,
H. Sadreazami, M. Bolic, and S. Rajan, “Fall detection using standoff radar-based sensing and deep convolutional neural network,”IEEE Trans. Circuits Syst. II, 2019
work page 2019
-
[16]
Bawseg: A uav multispectral benchmark for barley weed segmentation,
H. Wang et al., “Bawseg: A uav multispectral benchmark for barley weed segmentation,”Remote Sensing, 2026
work page 2026
-
[17]
Fall detection of elderly through floor vibrations and sound,
D. Litvak, Y . Zigel, and I. Gannot, “Fall detection of elderly through floor vibrations and sound,” inEMBC ’08, 2008
work page 2008
-
[18]
Feasibility of using floor vibration to detect human falls,
Y . Shao et al., “Feasibility of using floor vibration to detect human falls,”Int. J. Environ. Res. Public Health, 2021
work page 2021
-
[19]
Detection of human fall using floor vibration and multi- features semi-supervised svm,
C. Liu et al., “Detection of human fall using floor vibration and multi- features semi-supervised svm,” inSensors, 2019
work page 2019
-
[20]
Vision and inertial sensing fusion for human action recognition: A review,
S. Majumder and N Kehtarnavaz, “Vision and inertial sensing fusion for human action recognition: A review,”IEEE Sensors Journal, 2020
work page 2020
-
[21]
Egofalls: a visual-audio dataset and benchmark for fall detection using egocentric cameras,
Y Wang, “Egofalls: a visual-audio dataset and benchmark for fall detection using egocentric cameras,” inICPR. Springer, 2024
work page 2024
-
[22]
Multispectral remote sensing for weed detection in west australian agricultural lands,
H. Wang et al., “Multispectral remote sensing for weed detection in west australian agricultural lands,” inDICTA. IEEE, 2024
work page 2024
-
[23]
Radar-based fall detection: A survey,
S. Hu et al., “Radar-based fall detection: A survey,”IEEE robotics & automation magazine, 2024
work page 2024
-
[24]
The generalized correlation method for estimation of time delay,
C. Knapp and G. Carter, “The generalized correlation method for estimation of time delay,”IEEE Trans. Acoust. Speech Signal Process., 2003
work page 2003
-
[25]
Dynamic programming algorithm optimization for spoken word recognition,
H. Sakoe and S. Chiba, “Dynamic programming algorithm optimization for spoken word recognition,”IEEE Trans. Acoust. Speech Signal Process., 2003
work page 2003
-
[26]
Mamba: linear-time sequence modeling with selective state spaces,
A. Gu and T. Dao, “Mamba: linear-time sequence modeling with selective state spaces,”COLM, 2024
work page 2024
-
[27]
Evaluation of a threshold-based tri-axial accelerometer fall detection algorithm,
A. K. Bourke, J. V . O’Brien, and G. M. Lyons, “Evaluation of a threshold-based tri-axial accelerometer fall detection algorithm,”Gait & Posture, 2007
work page 2007
-
[28]
Detecting falls with wearable sensors using machine learning techniques,
A. T. Ozdemir and B. Barshan, “Detecting falls with wearable sensors using machine learning techniques,”Sensors, 2014
work page 2014
-
[29]
Heterogeneous sensor data fusion for human falling detection,
D. Pan, H. Liu, and D. Qu, “Heterogeneous sensor data fusion for human falling detection,”IEEE Access, 2021
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.