Recognition: no theorem link
ALIVE-LIO: Degeneracy-Aware Learning of Inertial Velocity for Enhancing ESKF-Based LiDAR-Inertial Odometry
Pith reviewed 2026-05-13 20:35 UTC · model grok-4.3
The pith
ALIVE-LIO compensates for LiDAR degeneracy by selectively fusing neural network velocity predictions into an error-state Kalman filter.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
ALIVE-LIO employs a neural network to predict body-frame velocity and fuses this prediction into the ESKF only upon detecting degeneracy in LiDAR observations, thereby providing state updates along unobservable directions and reducing pose drift in challenging environments.
What carries the argument
Degeneracy-aware selective fusion of neural velocity predictions into the ESKF
Load-bearing premise
The neural network must deliver accurate velocity predictions specifically in the degenerate directions, and the degeneracy detector must activate fusion without adding bias to the estimate.
What would settle it
Running the system on a sequence in a degenerate environment where the neural velocity prediction error is larger than the natural LiDAR drift would show increased error compared to standard ESKF-LIO.
Figures






read the original abstract
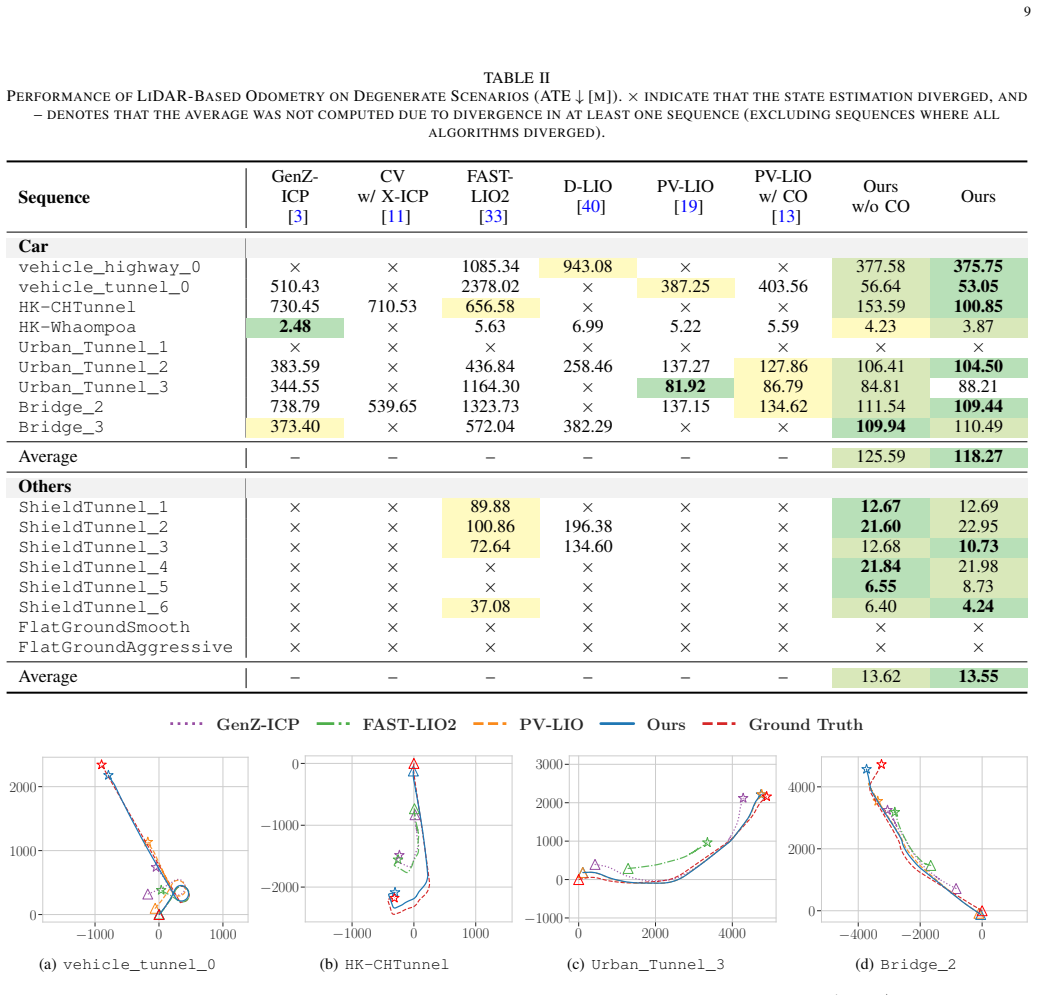
Odometry estimation using light detection and ranging (LiDAR) and an inertial measurement unit (IMU), known as LiDAR-inertial odometry (LIO), often suffers from performance degradation in degenerate environments, such as long corridors or single-wall scenarios with narrow field-of-view LiDAR. To address this limitation, we propose ALIVE-LIO, a degeneracy-aware LiDAR-inertial odometry framework that explicitly enhances state estimation in degenerate directions. The key contribution of ALIVE-LIO is the strategic integration of a deep neural network into a classical error-state Kalman filter (ESKF) to compensate for the loss of LiDAR observability. Specifically, ALIVE-LIO employs a neural network to predict the body-frame velocity and selectively fuses this prediction into the ESKF only when degeneracy is detected, providing effective state updates along degenerate directions. This design enables ALIVE-LIO to utilize the probabilistic structure and consistency of the ESKF while benefiting from learning-based motion estimation. The proposed method was evaluated on publicly available datasets exhibiting degeneracy, as well as on our own collected data. Experimental results demonstrate that ALIVE-LIO substantially reduces pose drift in degenerate environments, yielding the most competitive results in 22 out of 32 sequences. The implementation of ALIVE-LIO will be publicly available.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes ALIVE-LIO, a degeneracy-aware LiDAR-inertial odometry framework that integrates a deep neural network to predict body-frame velocity and selectively fuses these predictions into an error-state Kalman filter (ESKF) only when degeneracy is detected, aiming to reduce pose drift in environments like corridors or single-wall scenarios where LiDAR observability is lost. It evaluates the method on public and self-collected datasets, claiming the most competitive results in 22 out of 32 sequences.
Significance. If the central experimental claims hold after addressing the gaps in validation, the work would offer a practical hybrid approach that preserves the probabilistic consistency of classical ESKF while leveraging learned velocity estimates for degenerate directions, potentially improving robustness for robotics applications in challenging real-world settings.
major comments (3)
- [Abstract and §4] Abstract and §4: The headline claim of superior performance on 22 of 32 sequences is presented without architecture details for the neural network, training procedure, explicit degeneracy metric, error bars on pose errors, or full baseline comparisons, leaving the load-bearing experimental support for the fusion strategy unverified.
- [§3.2–3.3] §3.2–3.3: The degeneracy detector and selective fusion rule into the ESKF are described at a high level, but no analysis or ablation is given on false-positive rates (which could inject biased updates) or false-negative rates (which would leave drift uncorrected), directly undermining the consistency guarantee of the filter.
- [Table 1 and §4.2] Table 1 and §4.2: Reported pose errors lack per-axis breakdowns or covariance consistency checks, so it is impossible to confirm that the NN predictions are accurate precisely along the LiDAR-unobservable directions flagged by the detector.
minor comments (2)
- [§2] §2: The state vector and covariance notation in the ESKF formulation would benefit from an explicit variable table to improve readability.
- [Figure 3] Figure 3: The degeneracy visualization could include quantitative thresholds or example innovation values to clarify when fusion is triggered.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We will revise the manuscript to supply the requested details on the neural network, detector performance analysis, and error reporting. Our point-by-point responses follow.
read point-by-point responses
-
Referee: [Abstract and §4] The headline claim of superior performance on 22 of 32 sequences is presented without architecture details for the neural network, training procedure, explicit degeneracy metric, error bars on pose errors, or full baseline comparisons, leaving the load-bearing experimental support for the fusion strategy unverified.
Authors: We agree that these details are necessary for full verification. In the revised manuscript we will add the neural network architecture and training procedure to §3.1, state the explicit degeneracy metric in §3.2, include error bars on all pose-error tables, and expand the baseline comparisons in §4 to directly support the selective-fusion claims. revision: yes
-
Referee: [§3.2–§3.3] The degeneracy detector and selective fusion rule into the ESKF are described at a high level, but no analysis or ablation is given on false-positive rates (which could inject biased updates) or false-negative rates (which would leave drift uncorrected), directly undermining the consistency guarantee of the filter.
Authors: We accept this criticism. We will insert a new ablation subsection in §4 that reports false-positive and false-negative rates of the degeneracy detector on all evaluated sequences and quantifies their effect on filter consistency, thereby confirming that selective fusion does not compromise the ESKF's probabilistic guarantees. revision: yes
-
Referee: [Table 1 and §4.2] Reported pose errors lack per-axis breakdowns or covariance consistency checks, so it is impossible to confirm that the NN predictions are accurate precisely along the LiDAR-unobservable directions flagged by the detector.
Authors: We will revise Table 1 to provide per-axis error breakdowns and add covariance-consistency analysis (NEES statistics) in §4.2. These changes will explicitly show that the network predictions are accurate in the directions identified as degenerate by the detector. revision: yes
Circularity Check
No significant circularity detected in derivation chain
full rationale
The paper's core approach integrates a separately trained neural network for body-frame velocity prediction into a standard ESKF, with selective fusion triggered by a degeneracy detector. No load-bearing step reduces by the paper's own equations to a fitted parameter renamed as prediction, a self-definition, or a self-citation chain. The ESKF structure, degeneracy detection logic, and NN training remain independent of the target pose-drift results, satisfying the criteria for a self-contained derivation.
Axiom & Free-Parameter Ledger
free parameters (1)
- degeneracy detection threshold
axioms (1)
- domain assumption ESKF maintains consistent probabilistic estimates when fused measurements are available and unbiased
Reference graph
Works this paper leans on
-
[1]
H. Wei, J. Jiao, X. Hu, J. Yu, X. Xie, J. Wu, Y . Zhu, Y . Liu, L. Wang, and M. Liu, “FusionPortableV2: A unified multi-sensor dataset for generalized slam across diverse platforms and scalable environments,”The Int. J. Robot. Res., vol. 44, no. 7, pp. 1093–1116, 2025
work page 2025
-
[2]
L.-T. Hsu, F. Huang, H.-F. Ng, G. Zhang, Y . Zhong, X. Bai, and W. Wen, “Hong Kong UrbanNav: An open-source multisensory dataset for benchmarking urban navigation algorithms,”NA VIGATION: J. Inst. Navig., vol. 70, no. 4, 2023
work page 2023
-
[3]
L.-T. Hsu, N. Kubo, W. Wen, W. Chen, Z. Liu, T. Suzuki, and J. Meguro, “UrbanNav: An open-sourced multisensory dataset for benchmarking positioning algorithms designed for urban areas,” inProc. Int. Tech. Meet. Satell. Division of the Inst. Navig., St. Louis, Missouri, Sep. 2021, pp. 226–256
work page 2021
-
[4]
Heterogeneous LiDAR dataset for benchmarking robust localization in diverse degenerate scenarios,
Z. Chen, Y . Qi, D. Feng, X. Zhuang, H. Chen, X. Hu, J. Wu, K. Peng, and P. Lu, “Heterogeneous LiDAR dataset for benchmarking robust localization in diverse degenerate scenarios,”The Int. J. Robot. Res., 2025
work page 2025
-
[5]
J. Lin and F. Zhang, “R3LIVE: A robust, real-time, RGB-colored, LiDAR-inertial-visual tightly-coupled state estimation and mapping pack- age,” inProc. IEEE Int. Conf. Robot. Automat., 2022, pp. 10 672–10 678
work page 2022
-
[6]
Fast-LIVO: Fast and tightly-coupled sparse-direct LiDAR-inertial-visual odometry,
C. Zheng, Q. Zhu, W. Xu, X. Liu, Q. Guo, and F. Zhang, “Fast-LIVO: Fast and tightly-coupled sparse-direct LiDAR-inertial-visual odometry,” inProc. IEEE/RSJ Int. Conf. Intell. Robot. Syst., 2022, pp. 4003–4009
work page 2022
-
[7]
Fast-LIVO2: Fast, direct LiDAR–inertial–visual odometry,
C. Zheng, W. Xu, Z. Zou, T. Hua, C. Yuan, D. He, B. Zhou, Z. Liu, J. Lin, F. Zhu, Y . Ren, R. Wang, F. Meng, and F. Zhang, “Fast-LIVO2: Fast, direct LiDAR–inertial–visual odometry,”IEEE Trans. Robot., vol. 41, pp. 326–346, 2025
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.