From High-Level Types to Low-Level Monitors: Synthesizing Verified Runtime Checkers for MAVLink
Pith reviewed 2026-05-13 16:48 UTC · model grok-4.3
The pith
Platum compiles minimal session types into verified flat C finite state machines for MAVLink monitoring
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
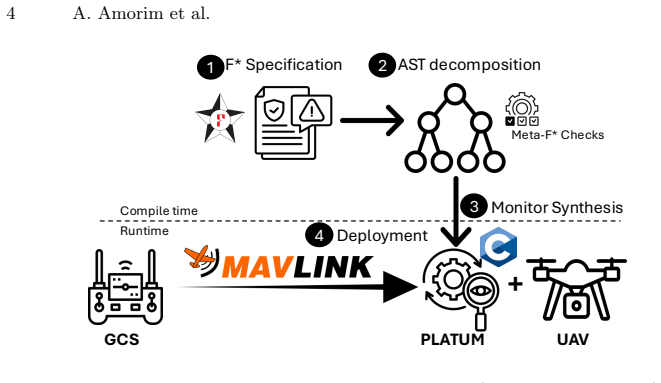
Platum addresses both engineering failures of prior work with a minimal DSL requiring only the five semantic components of a global session type, whose structural well-formedness conditions are confirmed via reflective decision procedures, and compiles directly into flat, allocation-free C Finite State Machines that achieve a 4x reduction in total monitor latency.
What carries the argument
Minimal DSL with five components (sender, receiver, label, payload variable, refinement predicate) that carries the argument by enabling reflective verification and direct compilation to C FSMs.
If this is right
- Monitors deploy as centralized proxies at the GCS/UAV communication boundary.
- Well-formedness conditions are confirmed automatically via decision procedures.
- Generated monitors achieve a 4x reduction in total latency and lower memory overhead.
- Allocation-free FSMs run directly on embedded UAV hardware without managed runtime.
Where Pith is reading between the lines
- The synthesis approach could extend to enforcing sequence constraints in other communication protocols used by embedded systems.
- Automated verification of refinements might help identify additional classes of contextual attacks not caught by syntax checks alone.
- Results from simulation suggest direct measurement on physical flight hardware to confirm behavior under real timing conditions.
Load-bearing premise
The five-component DSL plus reflective decision procedures are sufficient to capture all contextual validity constraints of MAVLink and that the generated C FSMs preserve the semantics of the original session types.
What would settle it
Observe whether the generated C FSMs reject a crafted sequence of syntactically valid but semantically invalid MAVLink messages that would induce unsafe states, or if they allow such sequences to pass without performance regressions on target hardware.
Figures


read the original abstract
Standard communication protocols for Unmanned Aerial Vehicles (UAVs), such as MAVLink, lack the capability to enforce the contextual validity of message sequences. Autopilots therefore remain vulnerable to stealthy attacks, where syntactically correct but semantically ill-timed commands induce unsafe states without triggering physical anomaly detectors. Prior work (DATUM) demonstrated that global Refined Multiparty Session Types (RMPSTs) are an effective specification language for centralized MAVLink protocol enforcement, but suffered from two engineering failures: manual proof terms interleaved with protocol definitions, and an OCaml extraction backend whose managed runtime is incompatible with resource-constrained UAV hardware. We present Platum, a framework that addresses both failures with a minimal DSL requiring only the five semantic components of a global session type (sender, receiver, label, payload variable, refinement predicate), whose structural well-formedness conditions are confirmed via reflective decision procedures in Meta-F*. Confirmed specifications are compiled directly into flat, allocation-free C Finite State Machines (FSMs), deployed as centralized proxy monitors at the GCS/UAV communication boundary. Our evaluation demonstrates a 4x reduction in total monitor latency and lower memory overhead compared to DATUM, measured via ArduPilot SITL simulation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents Platum, a framework that uses a minimal DSL consisting of the five semantic components of a global session type (sender, receiver, label, payload variable, refinement predicate) to specify MAVLink protocols. Structural well-formedness is checked via reflective decision procedures in Meta-F*, and specifications are compiled directly to flat, allocation-free C finite state machines deployed as centralized monitors at the GCS/UAV boundary. The work claims to resolve the manual-proof and runtime-incompatibility issues of prior DATUM work while delivering a 4x reduction in total monitor latency, measured in ArduPilot SITL simulation.
Significance. If the compilation preserves the semantics of the original RMPSTs (including refinement predicates) and the performance numbers hold under realistic conditions, the result would provide a practical route to verified, low-overhead protocol enforcement on resource-constrained UAV hardware, directly addressing stealthy command-sequence attacks that current anomaly detectors miss.
major comments (2)
- [Abstract] Abstract: the central performance claim of a '4x reduction in total monitor latency' is stated without any quantitative data, error bars, exact test scenarios, or comparison baselines from the ArduPilot SITL runs; this datum is load-bearing for the claim that the C FSM backend is practically superior to DATUM.
- [Abstract] Abstract and compilation section: no end-to-end correspondence theorem or machine-checked proof is provided that the generated flat C FSMs preserve the acceptance language and refinement-predicate semantics of the original RMPSTs under the minimal DSL; any mismatch in payload decoding or predicate evaluation would silently alter the monitored behavior.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on arXiv:2604.03886. We address each major comment below and indicate planned revisions to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central performance claim of a '4x reduction in total monitor latency' is stated without any quantitative data, error bars, exact test scenarios, or comparison baselines from the ArduPilot SITL runs; this datum is load-bearing for the claim that the C FSM backend is practically superior to DATUM.
Authors: We agree that the abstract would be strengthened by including supporting quantitative details. The full evaluation section reports the ArduPilot SITL results with specific average latencies, standard deviations, exact test scenarios (including message sequences and payload sizes), and direct DATUM baselines that establish the 4x reduction. We will revise the abstract to incorporate these key figures and error bars. revision: yes
-
Referee: [Abstract] Abstract and compilation section: no end-to-end correspondence theorem or machine-checked proof is provided that the generated flat C FSMs preserve the acceptance language and refinement-predicate semantics of the original RMPSTs under the minimal DSL; any mismatch in payload decoding or predicate evaluation would silently alter the monitored behavior.
Authors: This is a fair observation. The compilation maps the five DSL components directly to C FSM states, transitions, and predicate evaluations to preserve semantics by construction, with Meta-F* ensuring well-formedness upfront. However, the current manuscript does not include a machine-checked correspondence theorem. We will expand the compilation section with a detailed informal semantic preservation argument covering acceptance languages and refinement predicates, while explicitly noting the lack of a formal theorem as a limitation. revision: partial
Circularity Check
No significant circularity; new DSL and compiler are independent of prior DATUM result
full rationale
The paper defines a new minimal DSL using only five semantic components of global session types, confirms well-formedness via reflective Meta-F* procedures, and compiles directly to flat allocation-free C FSMs. Performance claims rest on fresh ArduPilot SITL simulation measurements rather than any fitted parameters or equations derived from the same inputs. The reference to prior DATUM work provides context for the engineering failures being addressed but does not serve as a load-bearing premise that reduces the new contributions to self-citation or definition; the derivation chain from DSL to generated monitors remains self-contained and externally measurable.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Global session types with sender, receiver, label, payload variable, and refinement predicate are sufficient to specify contextual validity of MAVLink message sequences
- domain assumption Reflective decision procedures in Meta-F* correctly confirm structural well-formedness of the session-type specifications
Reference graph
Works this paper leans on
-
[1]
R2U2: monitoring and diagnosis of security threats for unmanned aerial systems | Formal Methods in System Design,https://link.springer.com/article/10. 1007/s10703-017-0275-x 20 A. Amorim et al
-
[2]
In: 2019 15th International Wireless Communications & Mobile Computing Confer- ence (IWCMC)
Allouch, A., Cheikhrouhou, O., Koubâa, A., Khalgui, M., Abbes, T.: MAVSec: Securing the MAVLink protocol for ardupilot/PX4 unmanned aerial systems. In: 2019 15th International Wireless Communications & Mobile Computing Confer- ence (IWCMC). pp. 621–628. IEEE (2019)
work page 2019
-
[3]
In: Dutle, A., Humphrey, L., Titolo, L
Amorim, A., Taylor, M., Kann, T., Harrison, W.L., Leavens, G.T., Joneckis, L.: Enforcing MAVLink Safety & Security Properties via Refined Multiparty Session Types. In: Dutle, A., Humphrey, L., Titolo, L. (eds.) NASA Formal Methods. pp. 1–10. Springer Nature Switzerland, Cham (2025)
work page 2025
-
[4]
In: 2025 International Conference on Unmanned Aircraft Systems (ICUAS)
Amorim, A., Taylor, M., Kann, T., Leavens, G.T., Harrison, W.L., Joneckis, L.: UAV Resilience Against Stealthy Attacks. In: 2025 International Conference on Unmanned Aircraft Systems (ICUAS). pp. 994–1001 (May 2025),https: //ieeexplore.ieee.org/abstract/document/11007915
-
[5]
Ancona, D., Franceschini, L., Ferrando, A., Mascardi, V.: RML: Theory and practice of a domain specific language for runtime verification. Science of Com- puter Programming205, 102610 (May 2021),https://www.sciencedirect.com/ science/article/pii/S0167642321000034
work page 2021
-
[6]
ArduPilot: MissionPlanner Issue #1248: Add support for new flight modes (2024), https://github.com/ArduPilot/MissionPlanner/issues/1248
work page 2024
-
[7]
In: 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall)
CHAARI,L.,CHAHBANI,S.,REZGUI,J.:MAV-DTLStowardSecurityEnhance- ment of the UAV-GCS Communication. In: 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall). pp. 1–5 (Nov 2020),https://ieeexplore.ieee.org/ document/9348584, iSSN: 2577-2465
-
[8]
In: 2024 4th International Con- ference on Digital Futures and Transformative Technologies (ICoDT2)
Hamza, M.A., Mohsin, M., Khalil, M., Kazmi, S.M.K.A.: MAVLink Protocol: A Survey of Security Threats and Countermeasures. In: 2024 4th International Con- ference on Digital Futures and Transformative Technologies (ICoDT2). pp. 1–8. IEEE (2024)
work page 2024
-
[9]
Khan, S., Liew, C.F., Yairi, T., McWilliam, R.: Unsupervised anomaly detection in unmanned aerial vehicles. Applied Soft Computing83, 105650 (Oct 2019),https: //www.sciencedirect.com/science/article/pii/S1568494619304302
work page 2019
-
[10]
Kim, H., Ozmen, M.O., Bianchi, A., Celik, Z.B., Xu, D.: PGFUZZ: Policy-Guided Fuzzing for Robotic Vehicles. In: NDSS (2021)
work page 2021
-
[11]
In: 28th USENIX Security Symposium (USENIX Security 19)
Kim, T., Kim, C.H., Rhee, J., Fei, F., Tu, Z., Walkup, G., Zhang, X., Deng, X., Xu, D.: RVFuzzer: Finding Input Validation Bugs in Robotic Vehicles through Control- Guided Testing. In: 28th USENIX Security Symposium (USENIX Security 19). pp. 425–442. USENIX Association, Santa Clara, CA (Aug 2019),https://www. usenix.org/conference/usenixsecurity19/present...
work page 2019
-
[12]
IEEE Access6, 43203–43212 (2018),https://ieeexplore.ieee.org/document/8425627
Kwon, Y.M., Yu, J., Cho, B.M., Eun, Y., Park, K.J.: Empirical Analysis of MAVLink Protocol Vulnerability for Attacking Unmanned Aerial Vehicles. IEEE Access6, 43203–43212 (2018),https://ieeexplore.ieee.org/document/8425627
-
[13]
Li, E., Stutz, F., Wies, T., Zufferey, D.: Sprout: A Verifier for Symbolic Multiparty Protocols. In: Piskac, R., Rakamarić, Z. (eds.) Computer Aided Verification. pp. 304–317. Springer Nature Switzerland, Cham (2025)
work page 2025
-
[14]
Luckcuck, M., Ferrando, A., Faruq, F.: Varanus: Runtime Verification for CSP. In: Towards Autonomous Robotic Systems: 26th Annual Conference, TAROS 2025, York, UK, August 20–22, 2025, Proceedings. pp. 259–272. Springer-Verlag, Berlin, Heidelberg (Aug 2025),https://doi.org/10.1007/978-3-032-01486-3_21
-
[15]
In: Eu- ropean Symposium on Programming
Martínez, G., Ahman, D., Dumitrescu, V., Giannarakis, N., Hawblitzel, C., Hriţcu, C., Narasimhamurthy, M., Paraskevopoulou, Z., Pit-Claudel, C., Protzenko, J., others: Meta-F: Proof Automation with SMT, Tactics, and Metaprograms. In: Eu- ropean Symposium on Programming. pp. 30–59. Springer International Publishing Cham (2019) From High-Level Types to Low-...
work page 2019
-
[16]
MAVLink Development Team: MAVLink: Micro Air Vehicle Communication Pro- tocol (2024),https://mavlink.io/
work page 2024
-
[17]
Meier, S., Schmidt, B., Cremers, C., Basin, D.: The TAMARIN Prover for the Sym- bolic Analysis of Security Protocols. In: Sharygina, N., Veith, H. (eds.) Computer Aided Verification. pp. 696–701. Springer, Berlin, Heidelberg (2013)
work page 2013
-
[18]
Proceedings of the ACM on Programming Languages1(ICFP), 1–29 (2017)
Protzenko, J., Zinzindohoué, J.K., Rastogi, A., Ramananandro, T., Wang, P., Zanella-Béguelin, S., Delignat-Lavaud, A., Hriţcu, C., Bhargavan, K., Fournet, C., others: Verified low-level programming embedded in F. Proceedings of the ACM on Programming Languages1(ICFP), 1–29 (2017)
work page 2017
-
[19]
Swamy, N., Hriţcu, C., Keller, C., Rastogi, A., Delignat-Lavaud, A., Forest, S., Bhargavan, K., Fournet, C., Strub, P.Y., Kohlweiss, M., others: Dependent types andmulti-monadiceffectsinF.In:Proceedingsofthe43rdannualACMSIGPLAN- SIGACTSymposium on Principles of Programming Languages. pp. 256–270 (2016)
work page 2016
-
[20]
In: 2025 Annual Computer Se- curity Applications Conference Workshops (ACSAC Workshops)
Taylor, M., Amorim, A., Joneckis, L.: Securing Modbus-Based Industrial Control Systems with Refined Multiparty Session Types. In: 2025 Annual Computer Se- curity Applications Conference Workshops (ACSAC Workshops). pp. 99–109 (Dec 2025),https://ieeexplore.ieee.org/abstract/document/11418027
-
[21]
In: 2021 51st Annual IEEE/IFIP International Conference on Dependable Systems and Networks (DSN)
Taylor, M., Chen, H., Qin, F., Stewart, C.: Avis: In-situ model checking for un- manned aerial vehicles. In: 2021 51st Annual IEEE/IFIP International Conference on Dependable Systems and Networks (DSN). pp. 471–483. IEEE (2021)
work page 2021
-
[22]
In: Aldrich, J., Sal- vaneschi, G
Vassor, M., Yoshida, N.: Refinements for Multiparty Message-Passing Proto- cols: Specification-Agnostic Theory and Implementation. In: Aldrich, J., Sal- vaneschi, G. (eds.) 38th European Conference on Object-Oriented Program- ming (ECOOP 2024). Leibniz International Proceedings in Informatics (LIPIcs), vol. 313, pp. 41:1–41:29. Schloss Dagstuhl – Leibniz-...
-
[23]
In: MILCOM 2025 - 2025 IEEE Military Communications Conference (MILCOM)
Wray,T.,Wang,Y.:PAVE-MAVLink:FormalVerificationofMAVLink2forSecure UAV Communications. In: MILCOM 2025 - 2025 IEEE Military Communications Conference (MILCOM). pp. 1389–1395 (Oct 2025),https://ieeexplore.ieee. org/document/11310743
-
[24]
Yoshida, N., Hu, R., Neykova, R., Ng, N.: The Scribble protocol language. In: Trustworthy Global Computing: 8th International Symposium, TGC 2013, Buenos Aires, Argentina, August 30-31, 2013, Revised Selected Papers 8. pp. 22–41. Springer (2014)
work page 2013
-
[25]
Zhou, F.: Refining Multiparty Session Types. Ph.D. thesis, Imperial College Lon- don, London, UK (2024),https://doi.org/10.25560/110416
-
[26]
Proceedings of the ACM on Programming Lan- guages4(OOPSLA), 1–30 (2020)
Zhou, F., Ferreira, F., Hu, R., Neykova, R., Yoshida, N.: Statically verified refine- ments for multiparty protocols. Proceedings of the ACM on Programming Lan- guages4(OOPSLA), 1–30 (2020)
work page 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.