Extremum Seeking of Static Maps in the Presence of Unknown Large Time-Varying Delays
Pith reviewed 2026-05-10 19:37 UTC · model grok-4.3
The pith
A discrete-time extremum seeking algorithm achieves unbiased exponential convergence for quadratic maps despite unknown large time-varying delays.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper establishes the first discrete-time unbiased extremum seeking algorithm that is robust to unknown large time-varying delays by using dithers whose frequencies scale with sqrt(ε) and a delay-free averaging analysis, thereby guaranteeing exponential convergence to the true extremum without bias for nD static quadratic maps whose Hessian lies in a known range.
What carries the argument
The delay-free transformation of the closed-loop system together with averaging analysis and dither frequencies chosen of order sqrt(ε) to cancel the effect of the unknown bounded time-varying delays.
If this is right
- Controller parameters can always be chosen to guarantee convergence for any prescribed delay bound.
- Larger delays produce slower but still exponential unbiased convergence.
- The small parameter ε directly sets the decay rate of the estimation error in discrete time.
- Practical stability conditions are provided for the classical (non-robust) extremum seeking system as well.
Where Pith is reading between the lines
- The same scaling of dither frequencies may extend to maps that are only locally quadratic near the extremum with an additional region-of-attraction estimate.
- The discrete-time formulation suggests direct digital implementation in systems where communication or sensor delays are present but bounded.
- If delay bounds are only partially known, an outer adaptive loop could be added to enlarge the assumed bound until stability is recovered.
Load-bearing premise
The map is quadratic at least locally, its Hessian lies inside a known bounded interval, and the delays are bounded by known constants.
What would settle it
Numerical or experimental observation that the estimation error stops converging exponentially once the actual delay exceeds the assumed upper bound or once the map curvature falls outside the assumed Hessian interval.
Figures
read the original abstract
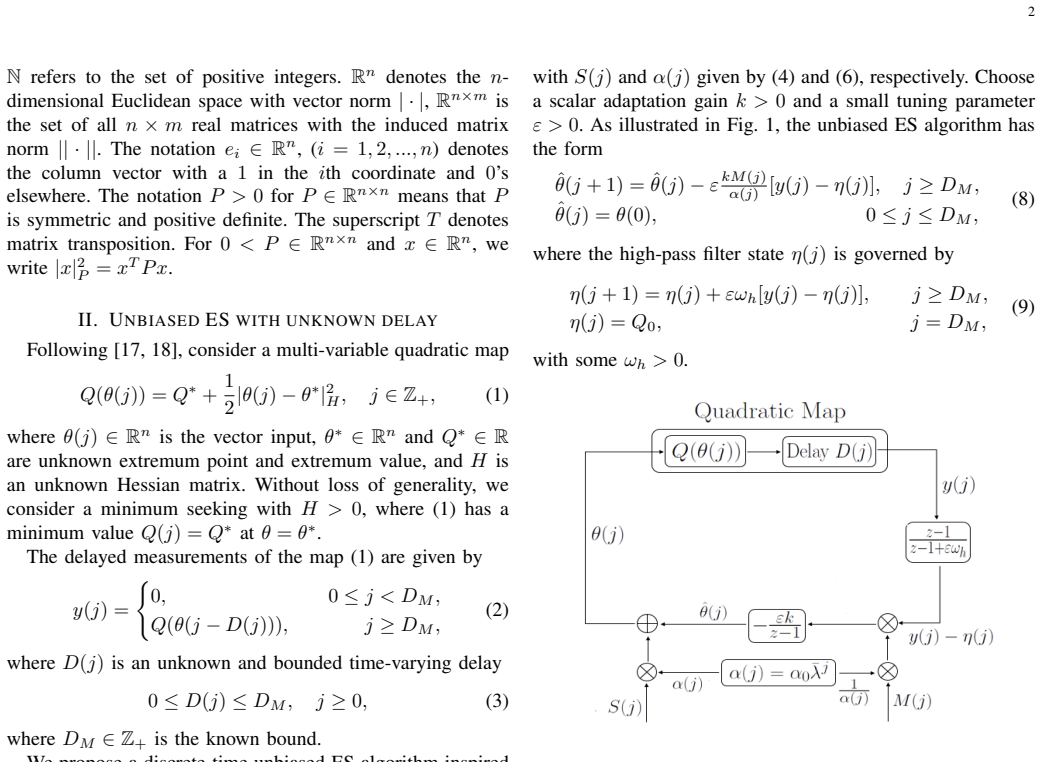
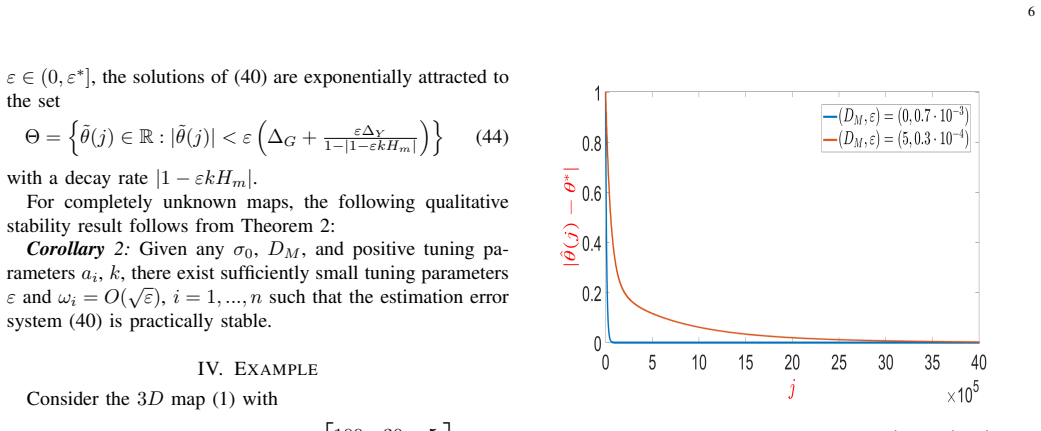
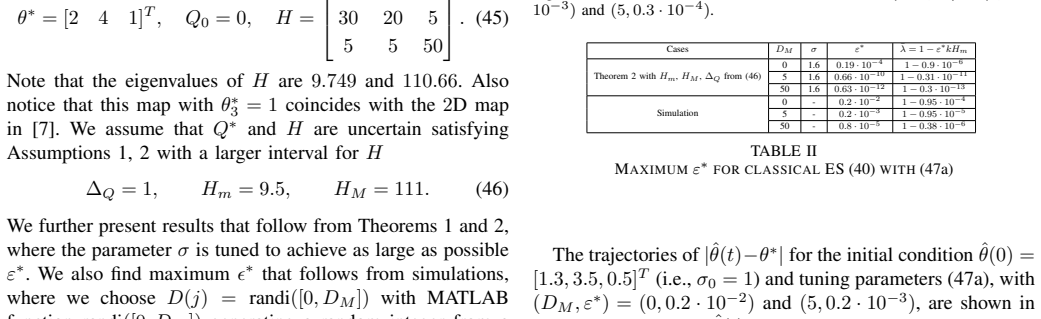
In this paper, we present the discrete-time unbiased extremum seeking (ES) algorithm for n-dimensional (nD) static quadratic maps in the presence of unknown time-varying measurement delays bounded by known constants which can be large. The existing ES results in the presence of large delays are usually confined to known constant or slowly-varying delays, which is restrictive. We provide the first ES algorithm, which is robust with respect to unknown large time-varying delays. Moreover, we achieve the unbiased exponential convergence. We manage with such delays by choosing dithers with frequencies of the order of \sqrt{\epsilon}, where the small parameter {\epsilon} > 0 appears in the dynamics of the real-time estimator. As expected, larger delays lead to a slower convergence. We provide qualitative and quantitative results based on the averaging analysis via delay-free transformation. For the quantitative bounds on the controller parameters that ensure the exponential unbiased convergence of the ES system, we assume that the Hessian of the map is uncertain and lies within a known range. Differently from its continuous-time counterpart, the small parameter in the discrete-time case defines the decay rate of the estimation error system, making a quantitative bound on this parameter particularly important. We present also constructive conditions for the practical stability of the classical ES system. Our results are semi-global for globally quadratic maps, while for locally quadratic static maps, we provide a bound on the region of convergence. Our analysis shows that appropriate ES parameters can be found for any large unknown time-varying bounded delay. A numerical example highlights the efficiency of the method.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a discrete-time unbiased extremum seeking algorithm for n-dimensional static quadratic maps subject to unknown time-varying measurement delays bounded only by known constants. It claims to provide the first ES scheme robust to such large unknown time-varying delays, achieving unbiased exponential convergence by selecting dither frequencies of order sqrt(epsilon) and applying averaging analysis after a delay-free transformation of the dynamics. Quantitative parameter bounds are derived under the assumption that the Hessian lies in a known range; results are semi-global for globally quadratic maps and local otherwise, with additional constructive conditions for practical stability of the classical ES system.
Significance. If the delay-free transformation and averaging analysis are rigorous and uniform over all admissible delay trajectories, the result would meaningfully extend extremum seeking to a broader class of practical systems where delays are large, unknown, and time-varying. The use of higher-frequency dithers to enable this, the unbiased exponential convergence guarantee, and the explicit dependence of convergence rate on the delay bound are technically interesting contributions. The numerical example and constructive conditions add value for implementation.
major comments (2)
- [Abstract and averaging analysis section] Abstract and the section on averaging analysis via delay-free transformation: The central claim of robustness to arbitrary unknown time-varying delays (with only an upper bound on tau(t) given) requires that the averaged system be exponentially stable and that the averaging error remain O(epsilon) or O(sqrt(epsilon)) uniformly with respect to all admissible tau(t), including those with arbitrarily large |d tau/dt|. The manuscript should explicitly confirm whether the transformation and subsequent error estimates (including any remainder terms) are independent of the delay variation rate or whether an implicit bound on |d tau/dt| is used; if the former, the uniformity argument must be highlighted as it is load-bearing for the 'first ES algorithm robust to unknown large time-varying delays' statement.
- [Quantitative bounds section] Section providing quantitative bounds on controller parameters: The exponential convergence guarantees assume the Hessian of the map lies within a known range. While this is stated as an assumption, the paper should clarify how such a range is obtained or verified in applications (especially for the semi-global case), since the admissible epsilon and dither frequencies depend on it; without this, the constructive conditions may not be fully actionable.
minor comments (2)
- The abstract refers to 'qualitative and quantitative results'; ensure all quantitative bounds (including explicit dependence on the known delay upper bound) are stated clearly with equation numbers in the main text.
- Notation for the small parameter epsilon and dither frequencies could be made more uniform across the discrete-time estimator dynamics and the averaging theorem statement.
Simulated Author's Rebuttal
We appreciate the referee's detailed feedback on our manuscript. The comments highlight important aspects of our averaging analysis and the practical applicability of our quantitative bounds. We provide point-by-point responses below and will incorporate clarifications and additional explanations in the revised version.
read point-by-point responses
-
Referee: [Abstract and averaging analysis section] Abstract and the section on averaging analysis via delay-free transformation: The central claim of robustness to arbitrary unknown time-varying delays (with only an upper bound on tau(t) given) requires that the averaged system be exponentially stable and that the averaging error remain O(epsilon) or O(sqrt(epsilon)) uniformly with respect to all admissible tau(t), including those with arbitrarily large |d tau/dt|. The manuscript should explicitly confirm whether the transformation and subsequent error estimates (including any remainder terms) are independent of the delay variation rate or whether an implicit bound on |d tau/dt| is used; if the former, the uniformity argument must be highlighted as it is load-bearing for the 'first ES algorithm robust to unknown large time-varying delays' statement.
Authors: We thank the referee for this insightful observation. In our analysis, the delay-free transformation is constructed using the known upper bound on the delay tau(t) <= tau_max, and it results in a system whose dynamics do not explicitly depend on the specific trajectory of tau(t) or its derivative. The subsequent averaging analysis and error estimates are performed on this transformed system, yielding bounds that are uniform over all admissible delay functions satisfying only the bound tau(t) <= tau_max. No implicit restriction on |d tau/dt| is imposed or used. We will revise the manuscript to explicitly state this uniformity and highlight the relevant arguments in the averaging section to strengthen the claim. revision: yes
-
Referee: [Quantitative bounds section] Section providing quantitative bounds on controller parameters: The exponential convergence guarantees assume the Hessian of the map lies within a known range. While this is stated as an assumption, the paper should clarify how such a range is obtained or verified in applications (especially for the semi-global case), since the admissible epsilon and dither frequencies depend on it; without this, the constructive conditions may not be fully actionable.
Authors: We agree that additional clarification on obtaining the Hessian range would enhance the practicality of the results. In the revised manuscript, we will add a discussion noting that for many applications, such as in optimization or control of quadratic cost functions, the Hessian can be bounded based on physical constraints or prior system knowledge. For the semi-global case with globally quadratic maps, the range can be taken as any conservative bound that encompasses the true Hessian, as the results hold for any such range. We will also include an example or remark on how to select this range to make the conditions more actionable for practitioners. revision: yes
Circularity Check
No significant circularity; derivation uses standard averaging after delay-free transformation
full rationale
The paper derives its unbiased exponential convergence claims via averaging analysis applied to a delay-free transformation of the discrete-time ES dynamics, with dither frequencies scaled as O(sqrt(epsilon)) and parameter bounds chosen for any bounded delay. This relies on external averaging theory and standard delay-system techniques rather than reducing the target result to a fitted parameter, self-defined quantity, or load-bearing self-citation chain. The Hessian-range assumption is an explicit input, not a tautology, and the semi-global/practical stability results follow from the transformed averaged system without renaming known patterns or smuggling ansatzes. The central claim remains independent of its own outputs.
Axiom & Free-Parameter Ledger
free parameters (2)
- epsilon (small design parameter)
- dither frequencies (order sqrt(epsilon))
axioms (3)
- domain assumption The static map is quadratic (globally or locally).
- domain assumption Measurement delays are unknown but bounded by known constants.
- domain assumption Hessian lies within a known range.
Reference graph
Works this paper leans on
-
[1]
K. B. Ariyur and M. Krstic.Real-time optimization by extremum-seeking control. John Wiley & Sons, 2003
work page 2003
-
[2]
J.-Y . Choi, M. Krstic, K. B. Ariyur, and J. S. Lee. Extremum seeking control for discrete-time systems.IEEE Transactions on automatic control, 47(2):318–323, 2002
work page 2002
-
[3]
N. Espitia, J. I. Poveda, and M. Krstic. Prescribed-time Newton extremum seeking using delays and time-periodic gains.arXiv preprint arXiv:2502.05464, 2025
-
[4]
E. Fridman and J. Zhang. Averaging of linear systems with almost periodic coefficients: A time-delay approach.Automatica, 122:109287, 2020
work page 2020
-
[5]
P. Frihauf, K. Miroslav, and T. Bas ¸ar. Finite-horizon lq control for unknown discrete-time linear systems via extremum seeking.European Journal of Control, 19(5):399–407, 2013
work page 2013
-
[6]
A. Ghaffari, M. Krsti ´c, and D. Ne ˇsi´c. Multivariable newton-based extremum seeking.Automatica, 48(8):1759–1767, 2012
work page 2012
-
[7]
M. Guay. A time-varying extremum-seeking control approach for discrete-time systems.Journal of Process Control, 24(3):98–112, 2014
work page 2014
-
[8]
M. Guay and D. Dochain. A time-varying extremum-seeking control approach.Automatica, 51:356–363, 2015
work page 2015
-
[9]
A. Jbara and E. Fridman. Discrete-time unbiased extremum seeking with quantitative bounds. In2025 IEEE 64th Conference on Decision and Control (CDC), pages 2232–2237. IEEE, 2025
work page 2025
- [10]
- [11]
-
[12]
M. Krsti ´c and H.-H. Wang. Stability of extremum seeking feedback for general nonlinear dynamic systems.Automatica, 36(4):595–601, 2000
work page 2000
-
[13]
M. Malisoff and M. Krstic. Multivariable extremum seeking with distinct delays using a one-stage sequential predictor.Automatica, 129:109462, 2021
work page 2021
- [14]
- [15]
-
[16]
T. R. Oliveira, J. Feiling, S. Koga, and M. Krsti ´c. Multivariable extremum seeking for pde dynamic systems.IEEE Transactions on Automatic Control, 65(11):4949–4956, 2020
work page 2020
-
[17]
T. R. Oliveira and M. Krstic.Extremum seeking through delays and PDEs. SIAM, 2022
work page 2022
-
[18]
T. R. Oliveira, M. Krsti ´c, and D. Tsubakino. Extremum seeking for static maps with delays.IEEE Transactions on Automatic Control, 62(4):1911–1926, 2016
work page 1911
-
[19]
G. Pan, Y . Zhu, E. Fridman, and Z. Wu. Extremum seeking of general nonlinear static maps: A time-delay approach.Automatica, 166:111710, 2024
work page 2024
- [20]
-
[21]
Y . Tan, D. Ne ˇsi´c, and I. Mareels. On non-local stability properties of extremum seeking control.Automatica, 42(6):889–903, 2006
work page 2006
-
[22]
Y . Tan, D. Ne ˇsi´c, I. M. Mareels, and A. Astolfi. On global extremum seeking in the presence of local extrema.Automatica, 45(1):245–251, 2009
work page 2009
-
[23]
X. Yang and E. Fridman. A robust time-delay approach to continuous- time extremum seeking for multi-variable static map. In2023 62nd IEEE Conference on Decision and Control (CDC), pages 6768–6773, 2023
work page 2023
-
[24]
X. Yang and E. Fridman. A time-delay approach to extremum seeking with large measurement delays.IF AC-PapersOnLine, 56(2):168–173, 2023
work page 2023
-
[25]
X. Yang, B. Zhao, and E. Fridman. A constructive approach to multi- variable extremum seeking with discrete-time delayed noisy measure- ments.International Journal of Robust and Nonlinear Control, 2026
work page 2026
-
[26]
C. T. Yilmaz, M. Diagne, and M. Krstic. Exponential and prescribed- time extremum seeking with unbiased convergence.Automatica, 179:112392, 2025
work page 2025
-
[27]
J. Zhang and E. Fridman. Lie-brackets-based averaging of affine systems via a time-delay approach.Automatica, 2023
work page 2023
- [28]
-
[29]
Y . Zhu, E. Fridman, and T. R. Oliveira. Sampled-data extremum seeking with constant delay: a time-delay approach.IEEE Transactions on Automatic Control, 68(1):432–439, 2022
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.