Efficient Multi-Objective Planning with Weighted Maximization Using Large Neighbourhood Search
Pith reviewed 2026-05-10 19:08 UTC · model grok-4.3
The pith
A Large Neighbourhood Search algorithm solves weighted maximum multi-objective planning problems up to two orders of magnitude faster than prior planners.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors propose a Large Neighbourhood Search algorithm that efficiently solves the discrete weighted-maximum multi-objective planning problem. By iteratively destroying and repairing portions of candidate plans, the algorithm explores the objective trade-off space without the exponential cost that previously restricted weighted-maximum methods to small instances.
What carries the argument
Large Neighbourhood Search framework adapted to the weighted-maximum objective, in which the algorithm repeatedly removes a subset of the current plan and repairs it to improve the maximum weighted cost across objectives.
If this is right
- Weighted-maximum planning can now be used in time-critical navigation loops where only weighted-sum methods were previously feasible.
- All Pareto-optimal solutions, including non-convex ones, become accessible without sacrificing real-time performance.
- The approach preserves the completeness property of weighted-maximum optimization while scaling to larger discrete state spaces.
Where Pith is reading between the lines
- The speed-up could enable frequent replanning when new sensor data arrives in dynamic environments.
- Embedding the planner on resource-limited hardware might become viable for small mobile robots.
- The same LNS structure could be applied to related multi-objective problems such as task allocation or coverage planning.
Load-bearing premise
The simulation environments and problem instances used accurately reflect the computational structure and scale of real-world discrete multi-objective navigation tasks.
What would settle it
Running both the new algorithm and an existing exact weighted-maximum solver on a set of larger, previously unsolved navigation instances and checking whether the new method returns solutions of matching quality within the claimed speed-up.
Figures





read the original abstract
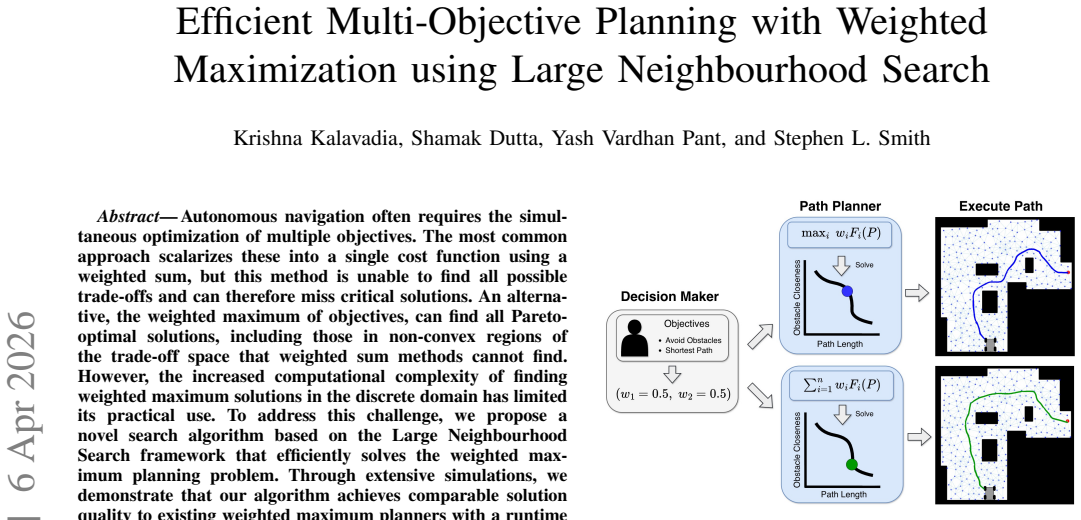
Autonomous navigation often requires the simultaneous optimization of multiple objectives. The most common approach scalarizes these into a single cost function using a weighted sum, but this method is unable to find all possible trade-offs and can therefore miss critical solutions. An alternative, the weighted maximum of objectives, can find all Pareto-optimal solutions, including those in non-convex regions of the trade-off space that weighted sum methods cannot find. However, the increased computational complexity of finding weighted maximum solutions in the discrete domain has limited its practical use. To address this challenge, we propose a novel search algorithm based on the Large Neighbourhood Search framework that efficiently solves the weighted maximum planning problem. Through extensive simulations, we demonstrate that our algorithm achieves comparable solution quality to existing weighted maximum planners with a runtime improvement of 1-2 orders of magnitude, making it a viable option for autonomous navigation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a Large Neighbourhood Search (LNS) algorithm to solve the weighted-maximum formulation of discrete multi-objective planning problems for autonomous navigation. It contrasts this with weighted-sum scalarization (which misses non-convex Pareto points) and claims that the LNS method finds solutions of comparable quality to existing weighted-max planners while delivering 1-2 orders of magnitude runtime improvement, as demonstrated in simulations.
Significance. If the runtime and quality claims can be substantiated with reproducible experiments and the heuristic's reliability clarified, the work would be a useful algorithmic contribution to practical multi-objective planning in robotics, lowering the barrier to computing complete trade-off sets (including non-convex regions) in real-time navigation settings.
major comments (2)
- [Abstract and §5] Abstract and §5 (Simulation Results): the central empirical claim of 'comparable solution quality' with '1-2 orders of magnitude' runtime improvement is asserted without specifying the exact baselines (which weighted-max planners were compared against), the problem-instance characteristics (grid sizes, number of objectives, obstacle densities), the quality metrics, or any statistical tests; this prevents evaluation of whether the reported gains are robust or instance-dependent.
- [§4] §4 (LNS Algorithm): the destroy/repair operators and acceptance criteria are described, yet no argument or condition is given under which the procedure is guaranteed to reach (or reliably approximate) the same weighted-max optima as an exact solver; because LNS is incomplete in general, the 'comparable quality' claim rests on an unproven assumption that may fail on instances containing locally optimal trade-offs.
minor comments (1)
- [Figures and Algorithm 1] Figure captions and pseudocode would benefit from explicit notation for the weighted-max objective function and the neighbourhood size parameter to improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment in turn below, indicating the revisions we will make to strengthen the presentation of our empirical results and the description of the LNS algorithm.
read point-by-point responses
-
Referee: [Abstract and §5] Abstract and §5 (Simulation Results): the central empirical claim of 'comparable solution quality' with '1-2 orders of magnitude' runtime improvement is asserted without specifying the exact baselines (which weighted-max planners were compared against), the problem-instance characteristics (grid sizes, number of objectives, obstacle densities), the quality metrics, or any statistical tests; this prevents evaluation of whether the reported gains are robust or instance-dependent.
Authors: The referee correctly notes that the abstract is high-level. Section 5 of the manuscript already specifies the baselines (exact weighted-max solvers via MIP and prior heuristic methods), instance characteristics (grid sizes from 10x10 to 100x100, 2-5 objectives, varying obstacle densities), and quality metric (achieved weighted-max objective value). However, to make these details immediately accessible and to address the lack of statistical tests, we will revise the abstract to briefly reference the experimental setup and augment §5 with mean/std-dev results plus paired statistical tests across repeated runs. These changes will allow readers to better assess robustness. revision: yes
-
Referee: [§4] §4 (LNS Algorithm): the destroy/repair operators and acceptance criteria are described, yet no argument or condition is given under which the procedure is guaranteed to reach (or reliably approximate) the same weighted-max optima as an exact solver; because LNS is incomplete in general, the 'comparable quality' claim rests on an unproven assumption that may fail on instances containing locally optimal trade-offs.
Authors: We agree that LNS is an incomplete metaheuristic and that no formal guarantee of reaching exact weighted-max optima is provided or possible in general. The manuscript's 'comparable solution quality' statement is presented strictly as an empirical finding from the simulations in §5, where LNS solutions matched or closely approximated exact-solver values on the evaluated instances. We will revise §4 to explicitly label the method as heuristic, describe how the chosen destroy/repair operators promote escape from local trade-off optima, and add a short limitations paragraph noting that performance may degrade on instances with particularly deceptive local structure. No completeness proof will be added, as none exists. revision: partial
Circularity Check
No circularity: algorithmic heuristic with external empirical validation
full rationale
The paper introduces a Large Neighbourhood Search procedure for solving the weighted-maximum multi-objective planning problem. Its central contribution is an algorithmic method whose performance (runtime and solution quality) is assessed via simulations against existing planners. No equations, predictions, or uniqueness claims reduce by construction to fitted parameters, self-definitions, or self-citation chains. The abstract and description contain no derivations that equate outputs to inputs; the work is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We propose a novel search algorithm based on the Large Neighbourhood Search framework that efficiently solves the weighted maximum planning problem... exploits the property that the Pareto fronts of WM subproblems can have convex geometry and are therefore solvable by the WS.
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The WM formulation is Pareto-complete... Unfortunately, solving this problem directly is NP-hard [2].
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
- [1]
-
[2]
Scalarizing Multi- Objective Robot Planning Problems Using Weighted Maximization,
N. Wilde, S. L. Smith, and J. Alonso-Mora, “Scalarizing Multi- Objective Robot Planning Problems Using Weighted Maximization,” IEEE Robot. Automat. Lett., vol. 9, no. 3, pp. 2503–2510, Mar. 2024
work page 2024
-
[3]
Automated Highway Driving Decision Considering Driver Characteristics,
W. Yang, L. Zheng, Y . Li, Y . Ren, and Z. Xiong, “Automated Highway Driving Decision Considering Driver Characteristics,”IEEE Trans on Intell. Transpor. Sys., vol. 21, no. 6, pp. 2350–2359, Jun. 2020
work page 2020
-
[4]
Hybrid Trajectory Planning for Autonomous Driving in On-Road Dynamic Scenarios,
W. Lim, S. Lee, M. Sunwoo, and K. Jo, “Hybrid Trajectory Planning for Autonomous Driving in On-Road Dynamic Scenarios,”IEEE Trans. on Intell. Transpor. Sys., vol. 22, no. 1, pp. 341–355, Jan. 2021
work page 2021
-
[5]
Z. Lu, Z. Liu, G. J. Correa, and K. Karydis, “Motion Planning for Collision-resilient Mobile Robots in Obstacle-cluttered Unknown Environments with Risk Reward Trade-offs,” inProc. IEEE/RSJ Int. Conf. on Intell. Robots and Syst., Oct. 2020, pp. 7064–7070
work page 2020
-
[6]
B. Lindqvist, A.-A. Agha-Mohammadi, and G. Nikolakopoulos, “Exploration-RRT: A multi-objective Path Planning and Exploration Framework for Unknown and Unstructured Environments,” inProc. IEEE/RSJ Int. Conf. on Intell. Robots and Syst., Sep. 2021, pp. 3429– 3435
work page 2021
-
[7]
Online Next-Best-View Planner for 3D-Exploration and Inspection With a Mobile Manipulator Robot,
M. Naazare, F. G. Rosas, and D. Schulz, “Online Next-Best-View Planner for 3D-Exploration and Inspection With a Mobile Manipulator Robot,”IEEE Robot. Automat. Lett., vol. 7, no. 2, pp. 3779–3786, Apr. 2022
work page 2022
-
[8]
Active preference-based learning of reward functions,
D. Sadigh, A. D. Dragan, S. Sastry, and S. A. Seshia, “Active preference-based learning of reward functions,” inRobotics: Science and Systems XIII (RSS), 2017
work page 2017
-
[9]
N. Wilde, A. Blidaru, S. L. Smith, and D. Kuli ´c, “Improving user specifications for robot behavior through active preference learning: Framework and evaluation,”Int. J. Robot. Res., vol. 39, no. 6, pp. 651–667, May 2020
work page 2020
-
[10]
Adaptive weighted-sum method for bi- objective optimization: Pareto front generation,
I. Kim and O. de Weck, “Adaptive weighted-sum method for bi- objective optimization: Pareto front generation,”Struct. and Multidis- cip. Optim., vol. 29, no. 2, pp. 149–158, Feb. 2005
work page 2005
-
[11]
I. Y . Kim and O. L. de Weck, “Adaptive weighted sum method for multiobjective optimization: a new method for Pareto front genera- tion,”Struct. and Multidiscip. Optim., vol. 31, no. 2, pp. 105–116, Feb. 2006
work page 2006
-
[12]
Multi-objective Path Planning for UA V in the Urban Environment Based on CDNSGA-II,
Q. Ren, Y . Yao, G. Yang, and X. Zhou, “Multi-objective Path Planning for UA V in the Urban Environment Based on CDNSGA-II,” inProc. IEEE Int. Conf. on Serv.-Orient. Sys. Eng., Apr. 2019, pp. 350–3505
work page 2019
-
[13]
H. Zheng, Y . Lu, J. Jie, B. Hou, M. Zhang, and Y . Zhang, “Gaussian Adaptive Strategy Based Multi-Objective Evolutionary Optimization for Path Planning on Uneven Terrains,”IEEE Robot. Automat. Lett., vol. 9, no. 1, pp. 539–546, Jan. 2024
work page 2024
-
[14]
Regret-based sampling of pareto fronts for multiobjective robot planning problems,
A. Botros, N. Wilde, A. Sadeghi, J. Alonso-Mora, and S. L. Smith, “Regret-based sampling of pareto fronts for multiobjective robot planning problems,”IEEE Trans. on Robot., vol. 40, pp. 3778–3794, 2024
work page 2024
-
[15]
Using Constraint Programming and Local Search Methods to Solve Vehicle Routing Problems,
P. Shaw, “Using Constraint Programming and Local Search Methods to Solve Vehicle Routing Problems,” inPrincip. and Prac. of Constr. Progr., M. Maher and J.-F. Puget, Eds. Berlin, Heidelberg: Springer, 1998, pp. 417–431
work page 1998
-
[16]
S. Ropke and D. Pisinger, “An Adaptive Large Neighborhood Search Heuristic for the Pickup and Delivery Problem with Time Windows,” Transpor. Sci., vol. 40, no. 4, pp. 455–472, Nov. 2006
work page 2006
-
[17]
An augmented large neighbor- hood search method for solving the team orienteering problem,
B.-I. Kim, H. Li, and A. L. Johnson, “An augmented large neighbor- hood search method for solving the team orienteering problem,”Exp. Sys. with App., vol. 40, no. 8, pp. 3065–3072, 2013
work page 2013
-
[18]
A general heuristic for vehicle routing problems,
D. Pisinger and S. Ropke, “A general heuristic for vehicle routing problems,”Computer. & Opera. Res., vol. 34, no. 8, pp. 2403–2435, Aug. 2007
work page 2007
-
[19]
An adaptive large neigh- borhood search for a vehicle routing problem with multiple routes,
N. Azi, M. Gendreau, and J.-Y . Potvin, “An adaptive large neigh- borhood search for a vehicle routing problem with multiple routes,” Comput. & Operat. Res., vol. 41, pp. 167–173, 2014
work page 2014
-
[20]
Anytime Multi-Agent Path Finding via Large Neighborhood Search,
J. Li, Z. Chen, D. Harabor, P. J. Stuckey, and S. Koenig, “Anytime Multi-Agent Path Finding via Large Neighborhood Search,” inProc. 13th Int. Joint Conf. on Artif. Intell., Aug. 2021, pp. 4127–4135
work page 2021
-
[21]
S. P. Boyd and L. Vandenberghe,Convex optimization. Cambridge university press, 2004
work page 2004
-
[22]
C. Audet and W. Hare,Derivative-Free and Blackbox Optimization. Springer International Publishing, 2017
work page 2017
-
[23]
Fast projection onto the simplex and theℓ 1 ball,
L. Condat, “Fast projection onto the simplex and theℓ 1 ball,”Math. Program., vol. 158, no. 1, pp. 575–585, Jul. 2016
work page 2016
-
[24]
Multiobjective evolutionary algorithms: a comparative case study and the strength pareto approach,
E. Zitzler and L. Thiele, “Multiobjective evolutionary algorithms: a comparative case study and the strength pareto approach,”IEEE Trans. on Evolu. Computa., vol. 3, no. 4, pp. 257–271, 1999
work page 1999
-
[25]
A. Gupta, V . Kumar, C. Lynch, S. Levine, and K. Hausman, “Relay policy learning: Solving long-horizon tasks via imitation and reinforce- ment learning,”arXiv preprint arXiv:1910.11956, 2019
-
[26]
J. Kwon, “Franka kitchen pybullet,” May 2025. [Online]. Available: https://github.com/kwonathan/franka-kitchen-pybullet
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.