Distributed Load Frequency Control of Multi-Area Smart Grid
Pith reviewed 2026-05-10 19:45 UTC · model grok-4.3
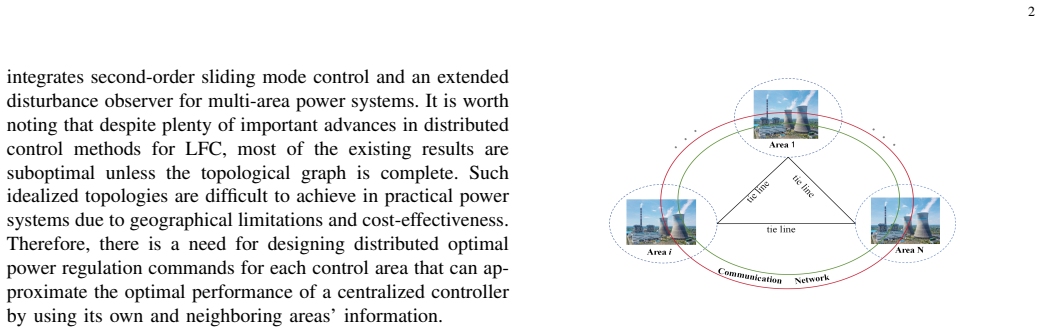
The pith
A distributed algorithm for load frequency control in smart grids can approach centralized optimal performance while keeping each area's internal parameters and states private from non-neighbors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The global optimal power regulation command can be recovered through distributed approximations of the control Riccati equation, the estimation Riccati equation, and the state estimation, all computed without transmitting internal structural parameters or operational states beyond neighboring areas.
What carries the argument
Distributed iterative approximations to the control and estimation Riccati equations together with a distributed state estimator, which together generate the optimal feedback command from local and neighbor data only.
If this is right
- The closed-loop frequency deviations and control effort under the new controller stay close to those of the centralized optimal law.
- The performance index is lower than that obtained by commonly used distributed control methods that do not solve the Riccati equations distributively.
- External load disturbances and measurement noise are rejected without requiring global information sharing.
- Information privacy constraints are satisfied because non-neighboring areas never exchange internal parameters or states.
Where Pith is reading between the lines
- The approach could be tested on larger interconnections to check whether the number of neighbor iterations needed for acceptable accuracy grows acceptably with system size.
- If the approximations remain accurate, similar distributed Riccati methods might be tried for other privacy-constrained networked control problems such as voltage regulation or economic dispatch.
- Real-time hardware-in-the-loop experiments would reveal whether communication delays between neighbors degrade the performance guarantee observed in the simulations.
Load-bearing premise
Each area can compute a sufficiently accurate local copy of the global Riccati solution and state estimate using only neighbor exchanges, even though the true system matrices and states of distant areas remain hidden.
What would settle it
A numerical simulation on the same multi-area benchmark in which the performance index achieved by the proposed distributed controller is not smaller than the index achieved by a standard distributed controller or deviates substantially from the centralized optimum.
Figures






read the original abstract
In this paper, we investigate the distributed load frequency control problem in a multi-area smart grid under external load disturbances and measurement noise. The novelty lies in that the information privacy is fully taken into account, that is, the internal structural parameters and operational states of each area are not shared with non-neighboring areas, which makes traditional distributed optimal control methods ineffective. The main contribution is to propose a distributed algorithm for the global optimal power regulation command under information privacy constraints via distributed approximation of the control Riccati equation, the estimation Riccati equation, and the state estimation. Simulation results show that the proposed algorithm can approximate the performance of centralized optimal control, and the performance index under the proposed distributed controller is smaller than that under the commonly used distributed control.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper addresses distributed load frequency control (LFC) for multi-area smart grids subject to external load disturbances and measurement noise. It proposes a distributed algorithm that respects information privacy by avoiding sharing of internal structural parameters and operational states with non-neighboring areas. The approach approximates the centralized optimal power regulation via distributed solutions to the control Riccati equation, estimation Riccati equation, and state estimation. Simulations are used to claim that the resulting controller approximates centralized optimal performance and achieves a smaller performance index than standard distributed control methods.
Significance. If the distributed Riccati approximations are shown to be reliable, this work would contribute to privacy-preserving optimal control in interconnected power systems, a practical concern for smart grids. The simulation-based demonstration of near-centralized performance and improvement over common distributed methods is a positive aspect, though stronger theoretical error bounds or convergence results would increase impact.
major comments (2)
- [Abstract and main derivation sections] The central claim that the distributed approximations achieve near-global optimality without non-neighbor information relies on the specific construction of the local Riccati updates and state estimators, but the abstract provides no error bounds, convergence rates, or conditions under which the approximation holds; this is load-bearing for the performance guarantee.
- [Simulation results section] Simulation results are invoked to support the approximation claim and superiority over common distributed control, yet without reported details on the number of areas, disturbance magnitudes, noise levels, or quantitative performance index values, it is not possible to assess whether the evidence is sufficient to back the near-optimality assertion.
minor comments (1)
- [Method sections] Notation for the distributed Riccati solutions and state estimates should be clarified to distinguish local from global quantities explicitly.
Simulated Author's Rebuttal
We thank the referee for the constructive comments and the opportunity to clarify and strengthen the manuscript. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract and main derivation sections] The central claim that the distributed approximations achieve near-global optimality without non-neighbor information relies on the specific construction of the local Riccati updates and state estimators, but the abstract provides no error bounds, convergence rates, or conditions under which the approximation holds; this is load-bearing for the performance guarantee.
Authors: The abstract summarizes the main contribution as a privacy-preserving distributed approximation to the centralized optimal LFC via local Riccati updates and state estimation. The derivation sections present the specific local update rules that enable this without non-neighbor sharing. We agree that the abstract does not state explicit error bounds or convergence rates. In revision we will modify the abstract to describe the result as an approximation under the stated privacy constraints and add a short discussion of the construction's assumptions and limitations in the main text. revision: partial
-
Referee: [Simulation results section] Simulation results are invoked to support the approximation claim and superiority over common distributed control, yet without reported details on the number of areas, disturbance magnitudes, noise levels, or quantitative performance index values, it is not possible to assess whether the evidence is sufficient to back the near-optimality assertion.
Authors: We thank the referee for this observation. The simulation section compares the proposed controller against centralized optimal control and standard distributed methods under disturbances and noise. We will revise the section to explicitly state the number of areas, the specific disturbance and noise magnitudes employed, and to include quantitative performance-index values (e.g., in a table) so that the evidence for the approximation claim can be directly evaluated. revision: yes
Circularity Check
No significant circularity
full rationale
The paper's core contribution is a distributed approximation scheme for the global Riccati solutions (control and estimation) and state estimates under privacy constraints that forbid sharing non-neighbor parameters or states. This is presented as an algorithmic construction built on standard LQR and Kalman-filter Riccati equations, with performance assessed via simulation against centralized optima and conventional distributed controllers. No step equates a claimed prediction or optimality result to a fitted parameter or self-referential definition; the approximations are not shown to be tautological with their inputs. No self-citation chain is load-bearing for the uniqueness or correctness of the method, and no ansatz is smuggled via prior work by the same authors. The derivation chain therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The multi-area grid dynamics can be modeled as linear time-invariant systems for which Riccati equations yield optimal control and estimation solutions.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
performance index J=E{∫[x'Qx+u'Ru]dt+x'Sx}
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Load frequency control with com- munication topology changes in smart grid,
V . P. Singh, N. Kishor, and P. Samuel, “Load frequency control with com- munication topology changes in smart grid,”IEEE Trans. Ind. Informat., vol. 12, no. 5, pp. 1943-1952, 2016. 8 TABLE II PERFORMANCE INDEX COMPARISON AMONG DIFFERENT CONTROLLERS. Case (Rwi, Rvi) J(Proposed) J(Centralized) J([9]) Case 1 (0.4, 0.5) 24.9134 24.9388 42.1107 Case 2 (0.1, 0...
work page 1943
-
[2]
M. Kouki, B. Marinescu, and F. Xavier, “Exhaustive modal analysis of large-scale interconnected power systems with high power electronics penetration,”IEEE Trans. Power Syst., vol. 35, no. 4, pp. 2759-2768, 2020
work page 2020
-
[3]
Load frequency control in power systems,
D. K. Chaturvedi, “Load frequency control in power systems,” Springer, 2011
work page 2011
-
[4]
Load frequency control in isolated micro-grids using centralized model predictive control,
P. S. V . Sagar and K. S. Swarup, “Load frequency control in isolated micro-grids using centralized model predictive control,” inProc. IEEE Int. Conf. Power Electron., Drives Energy Syst., Trivandrum, India, 2016, pp. 1-6
work page 2016
-
[5]
Decentralized model predictive control for load-frequency control of interconnected power system,
S. Rajesh and M. Swarup, “Decentralized model predictive control for load-frequency control of interconnected power system,”IEEE Trans. Power Syst., vol. 30, no. 1, pp. 1-9, 2014
work page 2014
-
[6]
C. J. Ramlal, A. Singh, S. Rocke, and M. Sutherland, “Decentralized fuzzyH ∞-iterative learning LFC with time-varying communication delays and parametric uncertainties,”IEEE Trans. Power Syst., vol. 34, no. 6, pp. 4718-4727, 2019
work page 2019
-
[7]
Distributed robust finite- time secondary voltage and frequency control of islanded microgrids,
N. M. Dehkordi, N. Sadati, and M. Hamzeh, “Distributed robust finite- time secondary voltage and frequency control of islanded microgrids,” IEEE Trans. Power Syst., vol. 32, no. 5, pp. 3648-3659, 2017
work page 2017
-
[8]
Z. Hu, K. Zhang, R. Su, and R. Wang, “Robust cooperative load frequency control for enhancing wind energy integration in multi-area power systems,”IEEE Trans. Autom. Sci. Eng., vol. 22, pp. 1508-1518, 2025
work page 2025
-
[9]
V . P. Singh, N. Kishor, and P. Samuel, “Distributed multi-agent system- based load frequency control for multi-area power system in smart grid,” IEEE Trans. Ind. Informat., vol. 64, no. 6, pp. 5151-5160, Jun. 2017
work page 2017
-
[10]
S. Liu and P. X. Liu, “Distributed model-based control and scheduling for load frequency regulation of smart grids over limited bandwidth networks,”IEEE Trans. Ind. Informat., vol. 14, no. 5, pp. 1814-1823, 2018
work page 2018
-
[11]
D. Chowdhury and H. K. Khalil, “Dynamic consensus and extended high gain observers as a tool to achieve practical frequency synchronization in power systems under unknown time-varying power demand,”Automatica, vol. 131, p. 109753, 2021
work page 2021
-
[12]
E. Vlahakis, L. D. Dritsas, and G. D. Halikias, “Distributed LQR design for identical dynamically coupled systems: Application to load frequency control of multi-area power grid,” inProc. IEEE Conf. Decis. Control, Nice, France, 2019, pp. 4471-4476
work page 2019
-
[13]
Distributed optimal generation and load-side control for frequency regulation in power systems,
L. Yang, T. Liu, Z. Tang, and D. J. Hill, “Distributed optimal generation and load-side control for frequency regulation in power systems,”IEEE Trans. Autom. Control, vol. 66, no. 6, pp. 2724-2731, 2021
work page 2021
-
[14]
Distributed robust adaptive frequency control of power systems with dynamic loads,
H. Kim, M. Zhu, and J. Lian, “Distributed robust adaptive frequency control of power systems with dynamic loads,”IEEE Trans. Autom. Control, vol. 65, no. 11, pp. 4887-4894, 2020
work page 2020
-
[15]
E. Vlahakis, L. D. Dritsas, and G. D. Halikias, “Distributed LQR design for a class of large-scale multi-area power systems: Application to load frequency control of multi-area power grid,”Energies, vol. 12, no. 14, p. 2664, 2019
work page 2019
-
[16]
P. Ge, X. Dou, X. Quan, Q. Hu, Z. Wu, and W. Gu, “Extended-state- observer-based distributed robust secondary voltage and frequency control for an autonomous microgrid,”IEEE Trans. Sustain. Energy, vol. 11, no. 1, pp. 195-205, 2020
work page 2020
-
[17]
M. Zhang, S. Dong, P. Shi, G. Chen, and X. Guan, “Distributed observer- based event-triggered load frequency control of multiarea power systems under cyber attacks,”IEEE Trans. Autom. Sci. Eng., vol. 20, no. 4, pp. 2435-2444, 2023
work page 2023
-
[18]
H. Haes Alhelou, M. E. Hamedani Golshan, and N. D. Hatziargyriou, “Deterministic dynamic state estimation-based optimal LFC for intercon- nected power systems using unknown input observer,”Inf. Control, vol. 38, no. 1, pp. 21-50, 1978
work page 1978
-
[19]
Globally stealthy attacks against distributed state estimation in smart grid,
S. Xu, D. Ye, G. Li, and D. Yang, “Globally stealthy attacks against distributed state estimation in smart grid,”IEEE Trans. Autom. Sci. Eng., vol. 22, pp. 1353-1363, 2025
work page 2025
-
[20]
Z. Wang, J. Dai, H. Zhang, and J. Zhang, “Observer-based finite-time fuzzy load frequency control for multiarea nonlinear power systems under input delays and cyber attacks,”IEEE Trans. Smart Grid, vol. 16, no. 4, pp. 3336-3345, 2025
work page 2025
-
[21]
Predictor-based load frequency control for large-scale networked control power systems,
J. Xia, X. Guo, J. H. Park, G. Chen, and X. Xie, “Predictor-based load frequency control for large-scale networked control power systems,”IEEE Trans. Power Syst., vol. 39, no. 5, pp. 6263–6276, 2024
work page 2024
-
[22]
K. Liao and Y . Xu, “A robust load frequency control scheme for power systems based on second-order sliding mode and extended disturbance observer,”IEEE Trans. Ind. Informat., vol. 14, no. 7, pp. 3076-3086, 2018
work page 2018
-
[23]
K. Zhou, J. C. Doyle, and K. Glover, “Robust and optimal control,” Prentice Hall, 1996
work page 1996
-
[24]
Distributed solving of linear quadratic optimal controller with terminal state constraint,
W. Yang, Z. Zhang, and J. Xu, “Distributed solving of linear quadratic optimal controller with terminal state constraint,” arXiv:2504.05631, 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.