Incremental Risk Assessment for Cascading Failures in Large-Scale Multi-Agent Systems
Pith reviewed 2026-05-10 19:46 UTC · model grok-4.3
The pith
Closed-form expressions quantify how communication delays and network connectivity amplify the risk of cascading failures in multi-agent systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
In time-delay consensus networks modeled as linear systems with stochastic noise, the Average Value-at-Risk of state deviations admits closed-form expressions depending on the Laplacian eigenvalues, the delay value, and noise statistics. These expressions establish lower bounds on the minimal achievable risk under delay constraints, providing certificates for network performance without exhaustive topology enumeration. A scalable single-step law propagates the conditional risk measure upon detection of new failures.
What carries the argument
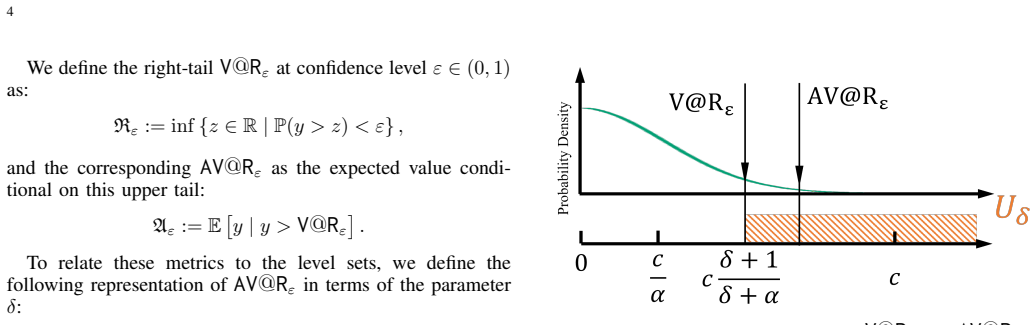
The Average Value-at-Risk measure applied to the deviation dynamics of the time-delay consensus protocol, which extracts the tail probability of large synchronized errors propagating through the network graph.
If this is right
- The risk of cascading failure can be evaluated in closed form from the network's connectivity properties and delay without simulation.
- Lower bounds serve as feasibility tests to determine if a target performance level is possible before choosing a specific network structure.
- Conditional risk updates require only one step when new agent failures are observed, enabling real-time monitoring in large networks.
- Explicit dependence on noise statistics allows direct assessment of how disturbance levels affect overall system safety.
Where Pith is reading between the lines
- This framework could be tested on physical robot teams to see if the predicted risk matches observed deviation spreads.
- The bounds might help in designing delay-tolerant communication protocols for vehicle fleets or sensor networks.
- Extensions could incorporate switching topologies if the spectrum changes over time.
Load-bearing premise
The interactions among agents are precisely captured by a linear consensus model with fixed time delays and additive random disturbances, making Average Value-at-Risk the right way to quantify how one failure spreads to others.
What would settle it
Running Monte Carlo simulations of the agent rendezvous task for different delay values and comparing the empirical tail risk to the closed-form prediction; significant mismatch would disprove the expressions.
Figures







read the original abstract
We develop a framework for studying and quantifying the risk of cascading failures in time-delay consensus networks, motivated by a team of agents attempting temporal rendezvous under stochastic disturbances and communication delays. To assess how failures at one or multiple agents amplify the risk of deviation across the network, we employ the Average Value-at-Risk as a systemic measure of cascading uncertainty. Closed-form expressions reveal explicit dependencies of the risk of cascading failure on the Laplacian spectrum, communication delay, and noise statistics. We further establish fundamental lower bounds that characterize the best-achievable network performance under time-delay constraints. These bounds serve as feasibility certificates for assessing whether a desired safety or performance goal can be achieved without exhaustive search across all possible topologies. In addition, we develop an efficient single-step update law that enables scalable propagation of conditional risk as new failures are detected. Analytical and numerical studies demonstrate significant computational savings and confirm the tightness of the theoretical limits across diverse network configurations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a framework for quantifying the risk of cascading failures in time-delay consensus networks of multi-agent systems, motivated by rendezvous tasks under disturbances. It employs Average Value-at-Risk (AVaR) as a systemic risk measure, claims closed-form expressions that explicitly link this risk to the Laplacian spectrum, communication delay, and noise statistics, derives fundamental lower bounds on best-achievable performance under delay constraints as feasibility certificates, and proposes an efficient single-step update law for scalable propagation of conditional risk upon failure detection. Analytical derivations and numerical studies are used to show computational savings and tightness of the bounds across network configurations.
Significance. If the derivations hold and the expressions are rigorously established, the work offers valuable tools for risk assessment and mitigation in large-scale networked control systems with delays and stochastic disturbances. The lower bounds serving as feasibility certificates without exhaustive topology search, combined with the incremental update law for conditional risk, represent practical strengths for scalability in multi-agent coordination. The analytical-numerical validation approach provides a balanced assessment of both theoretical limits and computational efficiency.
major comments (1)
- [Abstract] Abstract: The central claim of 'closed-form expressions' revealing explicit dependencies of the AVaR risk on the Laplacian spectrum, delay, and noise statistics is load-bearing for the contribution. The modal decomposition into independent DDEs ż_i(t) = −λ_i z_i(t−τ) + w_i(t) yields stationary variances via the unevaluated frequency integral (σ²/2π) ∫ |1/(jω + λ_i exp(−jω τ))|² dω for each eigenvalue λ_i. This requires numerical quadrature and does not reduce to an elementary algebraic closed form, so the explicit-dependency interpretation needs clarification or further reduction in the derivations.
minor comments (2)
- The abstract refers to 'analytical and numerical studies' demonstrating savings and bound tightness; specifying the range of network sizes, eigenvalue distributions, and delay values used in validation would aid reproducibility.
- Ensure consistent definition of key terms such as AVaR and the precise form of the time-delay consensus dynamics upon first use in the main text.
Simulated Author's Rebuttal
We thank the referee for the thorough review and constructive criticism. The observation on the nature of the claimed closed-form expressions is valid and has prompted us to revise the abstract and relevant sections for precision. We address the comment point-by-point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim of 'closed-form expressions' revealing explicit dependencies of the AVaR risk on the Laplacian spectrum, delay, and noise statistics is load-bearing for the contribution. The modal decomposition into independent DDEs ż_i(t) = −λ_i z_i(t−τ) + w_i(t) yields stationary variances via the unevaluated frequency integral (σ²/2π) ∫ |1/(jω + λ_i exp(−jω τ))|² dω for each eigenvalue λ_i. This requires numerical quadrature and does not reduce to an elementary algebraic closed form, so the explicit-dependency interpretation needs clarification or further reduction in the derivations.
Authors: We agree that the per-mode stationary variance is expressed via the frequency integral, which generally requires numerical quadrature and does not simplify to an elementary algebraic expression in λ_i and τ. The manuscript's intent was to emphasize that the overall AVaR risk (and thus the cascading-failure metric) depends explicitly and separably on the individual Laplacian eigenvalues, the common delay τ, and the noise statistics, rather than on the full adjacency matrix or coupled dynamics. This modal separation is what enables the claimed scalability and the lower bounds. We have revised the abstract to replace 'Closed-form expressions' with 'Explicit expressions' and added a clarifying paragraph in Section III-B stating that the integral is evaluated numerically per eigenvalue but remains an explicit function of λ_i, τ, and σ² only. No further algebraic reduction is possible in general, but the explicit per-eigenvalue form is sufficient for the paper's contributions on risk propagation and feasibility certificates. revision: yes
Circularity Check
No significant circularity detected
full rationale
The derivation starts from the linear time-delay consensus model with additive noise, applies modal decomposition to obtain independent DDEs, computes stationary statistics via frequency integrals, and applies the AVaR functional to those statistics. All steps follow from the stated assumptions without any parameter being fitted to the target risk quantity and then relabeled as a prediction. No self-citation is invoked to justify a uniqueness result or to smuggle an ansatz. The claimed closed-form expressions are explicit (albeit integral) functions of the Laplacian spectrum, delay, and noise intensity; they do not reduce to the input data by construction. Lower bounds are obtained by optimizing the same expressions over admissible spectra, again without circularity.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The multi-agent system obeys linear time-delay consensus dynamics driven by stochastic disturbances.
- domain assumption Average Value-at-Risk is a suitable coherent risk measure for systemic cascading uncertainty.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Closed-form expressions reveal explicit dependencies of the risk of cascading failure on the Laplacian spectrum, communication delay, and noise statistics... the stationary variance for each mode is (σ²/2π) ∫ |1/(jω + λ_i exp(−jω τ))|² dω
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Lemma 1... σ_ij = (b²/2) Σ_{k=2}^n [cos(λ_k τ)/(λ_k (1−sin(λ_k τ)))] (m_i^⊤ q_k)(m_j^⊤ q_k)
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanabsolute_floor_iff_bare_distinguishability unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Theorem 5... best-achievable risk lower bound A_+ = min{κ_ε σ_min, √(f/¯f) y_f} with σ_min = √((n−1)/n b² τ f)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
On the perception of social consensus
J. Krueger. “On the perception of social consensus”. In:Ad- vances in experimental social psychology30 (1998), pp. 163– 240
work page 1998
-
[2]
Consensus-based distributed intrusion detection for multi- robot systems
A. Fagiolini, M. Pellinacci, G. Valenti, G. Dini, and A. Bicchi. “Consensus-based distributed intrusion detection for multi- robot systems”. In:2008 IEEE International Conference on Robotics and Automation. IEEE. 2008, pp. 120–127
work page 2008
-
[3]
C. Somarakis, Y . Ghaedsharaf, and N. Motee. “Time-delay origins of fundamental tradeoffs between risk of large fluc- tuations and network connectivity”. In:IEEE Transactions on Automatic Control64.9 (2019)
work page 2019
-
[4]
Cascading Failures in Interdependent Infrastructures: An Interdependent Markov- Chain Approach
M. Rahnamay-Naeini and M. M. Hayat. “Cascading Failures in Interdependent Infrastructures: An Interdependent Markov- Chain Approach”. In:IEEE Transactions on Smart Grid7.4 (2016), pp. 1997–2006
work page 2016
-
[5]
Cascading failures in interdependent systems under a flow redistribution model
Y . Zhang, A. Arenas, and O. Ya ˘gan. “Cascading failures in interdependent systems under a flow redistribution model”. In: Physical Review E97.2 (2018), p. 022307
work page 2018
-
[6]
Robustness of interdependent cyber- physical systems against cascading failures
Y . Zhang and O. Ya ˘gan. “Robustness of interdependent cyber- physical systems against cascading failures”. In:IEEE Trans- actions on Automatic Control65.2 (2019), pp. 711–726
work page 2019
-
[7]
Risk of Cascading Failures in Time-Delayed Vehicle Platooning
G. Liu, C. Somarakis, and N. Motee. “Risk of Cascading Failures in Time-Delayed Vehicle Platooning”. In:2021 60th IEEE Conference on Decision and Control (CDC). 2021, pp. 4841–4846
work page 2021
-
[8]
G. Liu, C. Somarakis, and N. Motee. “Emergence of Cascading Risk and Role of Spatial Locations of Collisions in Time- Delayed Platoon of Vehicles”. In:2022 IEEE 61st Conference on Decision and Control (CDC). IEEE. 2022, pp. 6460–6465
work page 2022
-
[9]
Risk of Cascading Col- lisions in Network of Vehicles with Delayed Communication
G. Liu, C. Somarakis, and N. Motee. “Risk of Cascading Col- lisions in Network of Vehicles with Delayed Communication”. In:IEEE Transactions on Automatic Control(2025)
work page 2025
-
[10]
Social consensus through the influence of committed minorities
J. Xie, S. Sreenivasan, G. Korniss, W. Zhang, C. Lim, and B. K. Szymanski. “Social consensus through the influence of committed minorities”. In:Physical Review E84.1 (2011), p. 011130
work page 2011
-
[11]
Optimization of Conditional Value-at-Risk
R. T. Rockafellar and S. Uryasev. “Optimization of Conditional Value-at-Risk”. In:Portfolio The Magazine Of The Fine Arts 2 (1999), pp. 1–26
work page 1999
-
[12]
Conditional value-at-risk for general loss distributions
R. T. Rockafellar and S. Uryasev. “Conditional value-at-risk for general loss distributions”. In:Journal of Banking and Finance 26.7 (2002), pp. 1443–1471
work page 2002
-
[13]
Interplays Between Systemic Risk and Network Topology in Consensus Net- works
C. Somarakis, M. Siami, and N. Motee. “Interplays Between Systemic Risk and Network Topology in Consensus Net- works”. In:IFAC-PapersOnLine. V ol. 49. 22. 2016
work page 2016
-
[14]
Aggregate fluc- tuations in time-delay linear consensus networks: A systemic risk perspective
C. Somarakis, Y . Ghaedsharaf, and N. Motee. “Aggregate fluc- tuations in time-delay linear consensus networks: A systemic risk perspective”. In:Proceedings of the American Control Conference. 2017
work page 2017
-
[15]
Risk of Cascading Failures in Multi-agent Rendezvous with Commu- nication Time Delay
G. Liu, V . Pandey, C. Somarakis, and N. Motee. “Risk of Cascading Failures in Multi-agent Rendezvous with Commu- nication Time Delay”. In:2022 American Control Conference (ACC). 2022, pp. 2172–2177
work page 2022
-
[16]
Cascading Waves of Fluctuation in Time-delay Multi-agent Rendezvous
G. Liu, V . Pandey, C. Somarakis, and N. Motee. “Cascading Waves of Fluctuation in Time-delay Multi-agent Rendezvous”. In:2023 American Control Conference (ACC). 2023, pp. 4110– 4115
work page 2023
-
[17]
Van Mieghem.Graph spectra for complex networks
P. Van Mieghem.Graph spectra for complex networks. Cam- bridge University Press, 2010
work page 2010
-
[18]
Information con- sensus in multivehicle cooperative control
W. Ren, R. W. Beard, and E. M. Atkins. “Information con- sensus in multivehicle cooperative control”. In:IEEE Control systems magazine27.2 (2007), pp. 71–82
work page 2007
-
[19]
Consensus and cooperation in networked multi-agent systems
R. Olfati-Saber, J. A. Fax, and R. M. Murray. “Consensus and cooperation in networked multi-agent systems”. In:Proceed- ings of the IEEE95.1 (2007), pp. 215–233
work page 2007
-
[20]
Modquad: The flying modular structure that self-assembles in midair
D. Saldana, B. Gabrich, G. Li, M. Yim, and V . Kumar. “Modquad: The flying modular structure that self-assembles in midair”. In:2018 IEEE International Conference on Robotics and Automation (ICRA). IEEE. 2018, pp. 691–698
work page 2018
-
[21]
Consensus problems in networks of agents with switching topology and time-delays
R. Olfati-Saber and R. M. Murray. “Consensus problems in networks of agents with switching topology and time-delays”. In:IEEE Transactions on automatic control49.9 (2004), pp. 1520–1533
work page 2004
- [22]
-
[23]
Value-at-risk vs. conditional value-at-risk in risk management and opti- mization
S. Sarykalin, G. Serraino, and S. Uryasev. “Value-at-risk vs. conditional value-at-risk in risk management and opti- mization”. In:State-of-the-art decision-making tools in the information-intensive age. Informs, 2008, pp. 270–294
work page 2008
-
[24]
C. Somarakis, G. Liu, and N. Motee. “Risk of Phase Incoher- ence in Wide Area Control of Synchronous Power Networks with Time-Delayed and Corrupted Measurements”. In:IEEE Transactions on Automatic Control(2023). 12
work page 2023
-
[25]
P. Erd ˝os and A. Rényi. “On Random Graphs I”. In:Publica- tiones Mathematicae (Debrecen)6 (1959), pp. 290–297
work page 1959
-
[26]
Data-driven distributionally robust mitigation of risk of cascading failures
G. Liu, A. Amini, V . Pandey, and N. Motee. “Data-driven distributionally robust mitigation of risk of cascading failures”. In:2024 American Control Conference (ACC). IEEE. 2024, pp. 3264–3269
work page 2024
-
[27]
Quantification of Distributionally Robust Risk of Cascade of Failures in Platoon of Vehicles
V . Pandey, G. Liu, A. Amini, and N. Motee. “Quantification of Distributionally Robust Risk of Cascade of Failures in Platoon of Vehicles”. In:2023 62nd IEEE Conference on Decision and Control (CDC). IEEE. 2023, pp. 7401–7406
work page 2023
-
[28]
V . Pandey and N. Motee. “Distributionally Robust Cascading Risk Quantification in Multi-Agent Rendezvous: Effects of Time Delay and Network Connectivity”. In:arXiv preprint arXiv:2507.23489(2025)
-
[29]
Y . L. Tong.The multivariate normal distribution. Springer Science & Business Media, 2012
work page 2012
-
[30]
W. H. Greene.Econometric analysis. Pearson Education India, 2003
work page 2003
-
[31]
Schur Complements and Statistics
D. V . Ouellette. “Schur Complements and Statistics”. In: Linear Algebra and Its Applications36.9 (1981), pp. 187–295
work page 1981
-
[32]
Toeplitz and circulant matrices: A review
R. M. Gray. “Toeplitz and circulant matrices: A review”. In: (2006)
work page 2006
-
[33]
D. S. J. Batson and N. Srivastava. “Twice - Ramanujan Sparsifiers”. In:SIAM Review56.2 (2014), pp. 315–334
work page 2014
-
[34]
R. A. Horn and C. R. Johnson.Matrix analysis. Cambridge university press, 2012
work page 2012
-
[35]
J. Liu, J. Zhang, and Y . Liu. “Trace inequalities for matrix products and trace bounds for the solution of the algebraic Riccati equations”. In:Journal of Inequalities and Applications 2009 (2009), pp. 1–17
work page 2009
-
[36]
Interplay between performance and communication delay in noisy linear consensus networks
Y . Ghaedsharaf, M. Siami, C. Somarakis, and N. Motee. “Interplay between performance and communication delay in noisy linear consensus networks”. In:2016 European Control Conference (ECC). IEEE. 2016, pp. 1703–1708. APPENDIX Proof of Lemma 1: The result is a immediate extension of the steady-state statistics of the observables in [3] by considering a cen...
work page 2016
-
[37]
Let us consider the vector of failed observables of(m+ 1)agents as[ ¯yf ¯yfk]⊤,where¯y f = [¯yf1 , ...,¯yfm]⊤ is the vector of failed observables ofmagents and¯y fk is the failed observable of agent k, i.e.,(m+ 1) th agent. Consider the following vectors, ˜Σ′ 12 = [ ˜Σ12 ˜Σ12(k)] = ˜Σ′T 12 and the conditional cross-covariance of agentsjandkaftermagents ha...
work page 2016
-
[38]
degree in the Department of Mechanical Engineering and Me- chanics at Lehigh University
He is currently pursuing a Ph.D. degree in the Department of Mechanical Engineering and Me- chanics at Lehigh University. His research interests include networked control systems. Christoforos SomarakisChristoforos Somarakis re- ceived the B.S. degree in Electrical Engineering from the National Technical University of Athens, Athens, Greece, in 2007 and t...
work page 2007
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.