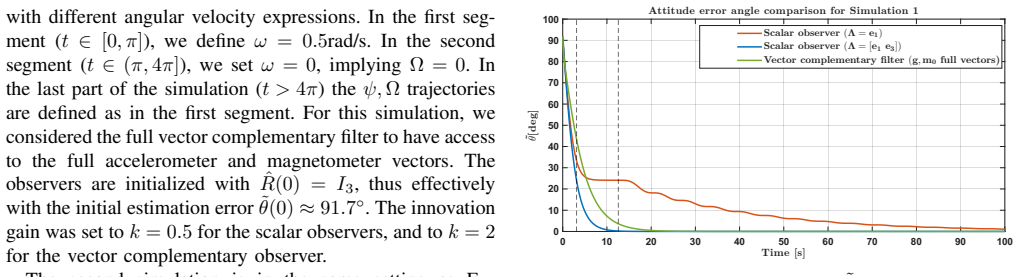
Complementary Filtering on SO(3) for Attitude Estimation with Scalar Measurements
Pith reviewed 2026-05-10 17:59 UTC · model grok-4.3
The pith
A modified complementary filter recovers almost-global asymptotic stability on SO(3) for attitude estimation using scalar measurements under persistence of excitation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors introduce a modified innovation term in the complementary filter on SO(3) that accommodates scalar measurements of inertial vectors. They prove that this yields almost-global asymptotic stability of the attitude error when three or more such scalars are obtained along one common body-fixed vector, assuming persistence of excitation conditions. For two-scalar configurations, they derive sufficient conditions for convergence within a smaller basin of attraction.
What carries the argument
The modified innovation term that uses scalar projections to update the attitude estimate on the rotation group SO(3).
If this is right
- The observer guarantees reliable attitude convergence in systems limited to scalar sensor outputs.
- Stability holds for the three-dimensional attitude when measurements align with the manifold dimension.
- Two-scalar setups provide a fallback with explicitly characterized convergence region.
- Numerical validations confirm practical utility in reduced-sensing environments.
Where Pith is reading between the lines
- This method could be adapted to other rotation representations like quaternions.
- Further work might derive explicit convergence rates or robustness margins to measurement noise.
- Applications in robotics and aerospace with novel low-dimensional sensors become more feasible.
- Testing on hardware with real scalar sensors would validate the theoretical excitation requirements.
Load-bearing premise
The scalar measurements must satisfy persistence of excitation conditions.
What would settle it
A simulation of the observer dynamics with three scalar measurements along one body vector that lack sufficient variation, in which the attitude error fails to converge to zero.
Figures



read the original abstract
Attitude estimation using scalar measurements, corresponding to partial vectorial observations, arises naturally when inertial vectors are not fully observed but only measured along specific body-frame vectors. Such measurements arise in problems involving incomplete vector measurements or attitude constraints derived from heterogeneous sensor information. Building on the classical complementary filter on SO(3), we propose an observer with a modified innovation term tailored to this scalar-output structure. The main result shows that almost-global asymptotic stability is recovered, under suitable persistence of excitation conditions, when at least three inertial vectors are measured along a common body-frame vector, which is consistent with the three-dimensional structure of SO(3). For two-scalar configurations - corresponding either to one inertial vector measured along two body-frame vectors, or to two inertial vectors measured along a common body-frame vector - we further derive sufficient conditions guaranteeing convergence within a reduced basin of attraction. Different examples and numerical results demonstrate the effectiveness of the proposed scalar-based complementary filter for attitude estimation in challenging scenarios involving reduced sensing and/or novel sensing modalities.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a modified complementary filter on SO(3) for attitude estimation from scalar (partial vector) measurements. It modifies the innovation term of the classical filter and claims to recover almost-global asymptotic stability under persistence-of-excitation conditions when three inertial vectors are observed along one common body-frame direction; for two-scalar configurations it derives sufficient conditions for convergence inside a reduced basin of attraction. Numerical examples and simulations are used to illustrate performance under reduced sensing.
Significance. If the stability results hold, the work meaningfully extends SO(3) complementary filters to incomplete vector measurements that arise in constrained or heterogeneous sensor problems. The provision of both almost-global and reduced-basin guarantees, together with numerical validation, would be a useful addition to the attitude-estimation literature.
major comments (2)
- [Main stability theorem / persistence-of-excitation analysis] Main stability result (abstract and the theorem establishing almost-global asymptotic stability): the claim recovers almost-global stability only after invoking persistence of excitation on the scalar measurements so that the time-averaged regressor is positive definite. No quantitative lower bound is supplied on the minimum eigenvalue of the integrated regressor or on admissible rotation rates that guarantee the PE condition. Because the scalar-output structure deliberately reduces instantaneous information, this assumption is load-bearing; without explicit bounds the basin and convergence rate remain trajectory-dependent.
- [Two-scalar case analysis] Two-scalar configurations (section deriving reduced-basin conditions): the sufficient conditions guaranteeing convergence inside a reduced basin are stated for the two geometries (one inertial vector measured along two body-frame vectors, or two inertial vectors along one body-frame vector), yet the manuscript does not compare the size of the resulting basins or examine whether the conditions are tight for either geometry.
minor comments (3)
- [Abstract] The abstract states the three-vector result clearly but could more explicitly separate the PE requirement from the two-scalar reduced-basin result.
- [Observer design] Notation for the scalar measurements and the modified innovation term should be introduced with an explicit equation reference early in the observer-design section.
- [Numerical results] The numerical examples would benefit from a table or plot quantifying convergence time versus rotation rate to illustrate the practical effect of the PE condition.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments on our manuscript. We address each major comment below, indicating the revisions made to strengthen the presentation while preserving the generality of the results.
read point-by-point responses
-
Referee: Main stability result (abstract and the theorem establishing almost-global asymptotic stability): the claim recovers almost-global stability only after invoking persistence of excitation on the scalar measurements so that the time-averaged regressor is positive definite. No quantitative lower bound is supplied on the minimum eigenvalue of the integrated regressor or on admissible rotation rates that guarantee the PE condition. Because the scalar-output structure deliberately reduces instantaneous information, this assumption is load-bearing; without explicit bounds the basin and convergence rate remain trajectory-dependent.
Authors: We agree that the persistence of excitation (PE) condition is central to establishing almost-global asymptotic stability and that the manuscript does not supply explicit quantitative lower bounds on the minimum eigenvalue of the integrated regressor or on admissible rotation rates. Such bounds are necessarily trajectory-dependent and would require additional assumptions on the attitude motion that would restrict the generality of the theorem. In the revised manuscript we have inserted a remark immediately after the main stability theorem that explicitly notes the trajectory-dependent character of the convergence rate and basin of attraction under the PE assumption. This addition aligns with standard practice in the adaptive estimation literature and clarifies the load-bearing role of the PE condition without altering the stated result. revision: partial
-
Referee: Two-scalar configurations (section deriving reduced-basin conditions): the sufficient conditions guaranteeing convergence inside a reduced basin are stated for the two geometries (one inertial vector measured along two body-frame vectors, or two inertial vectors along one body-frame vector), yet the manuscript does not compare the size of the resulting basins or examine whether the conditions are tight for either geometry.
Authors: The sufficient conditions for the two-scalar geometries are derived separately because the measurement structures differ. We acknowledge that a comparison of the resulting basin sizes and an assessment of condition tightness would be valuable. In the revised manuscript we have augmented the numerical examples section with new simulations that directly compare the effective regions of attraction for both geometries under the derived conditions. We have also added a short discussion of the conservatism of the Lyapunov-based conditions. While an exact analytical comparison of basin volumes remains difficult owing to the distinct regressor structures, the added simulations illustrate that both geometries produce practically useful and comparable basins of attraction. revision: yes
Circularity Check
Stability derived from modified observer dynamics and PE assumptions
full rationale
The derivation proceeds from the proposed scalar-output observer (modified innovation term) to a Lyapunov function whose derivative is rendered negative semi-definite once the persistence-of-excitation condition on the time-varying regressor is invoked. This is a standard, non-circular application of Lyapunov theory with an explicit external assumption; the PE condition is not derived from the result itself, nor is any parameter fitted to data and then relabeled as a prediction. No self-citation is load-bearing for the central claim, and the three-vector case simply recovers the dimension of SO(3) without tautological redefinition.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Persistence of excitation conditions on the scalar measurement signals must hold for the stability proof to apply.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
almost-global asymptotic stability is recovered, under suitable persistence of excitation conditions, when at least three inertial vectors are measured along a common body-frame vector, which is consistent with the three-dimensional structure of SO(3)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
A least squares estimate of satellite attitude,
G. Wahba, “A least squares estimate of satellite attitude,”SIAM review, vol. 7, no. 3, pp. 409–409, 1965
work page 1965
-
[2]
A vector approach to the algebra of rotations with applications,
P. B. Davenport, “A vector approach to the algebra of rotations with applications,” 1968, technical Report, Goddard Space Flight Center
work page 1968
-
[3]
Three-axis attitude determination from vector observations,
M. D. Shuster and S. D. Oh, “Three-axis attitude determination from vector observations,”Journal of guidance and Control, vol. 4, no. 1, pp. 70–77, 1981
work page 1981
-
[4]
Attitude determination using vector observations and the singular value decomposition,
F. L. Markley, “Attitude determination using vector observations and the singular value decomposition,”The Journal of the Astronautical Sciences, vol. 36, no. 3, pp. 245–258, 1988
work page 1988
-
[5]
Survey of nonlinear attitude estimation methods,
J. L. Crassidis, F. L. Markley, and Y . Cheng, “Survey of nonlinear attitude estimation methods,”Journal of Guidance, Control, and Dynamics, vol. 30, no. 1, pp. 12–28, 2007
work page 2007
-
[6]
Nonlinear complementary filters on the special orthogonal group,
R. Mahony, T. Hamel, and J.-M. Pflimlin, “Nonlinear complementary filters on the special orthogonal group,”IEEE Transactions on Auto- matic Control, vol. 53, pp. 1203–1218, 6 2008
work page 2008
-
[7]
Analysis of non- linear attitude observers for time-varying reference measurements,
J. Trumpf, R. Mahony, T. Hamel, and C. Lageman, “Analysis of non- linear attitude observers for time-varying reference measurements,” IEEE Transactions on Automatic Control, vol. 57, pp. 2789–2800, 11 2012
work page 2012
-
[8]
Attitude estimation using biased gyro and vector measurements with time- varying reference vectors,
H. F. Grip, T. I. Fossen, T. A. Johansen, and A. Saberi, “Attitude estimation using biased gyro and vector measurements with time- varying reference vectors,”IEEE Transactions on automatic control, vol. 57, no. 5, pp. 1332–1338, 2011
work page 2011
-
[9]
Nonlinear estimator design on the special orthogonal group using vector measurements directly,
D. E. Zlotnik and J. R. Forbes, “Nonlinear estimator design on the special orthogonal group using vector measurements directly,”IEEE Transactions on Automatic Control, vol. 62, no. 1, pp. 149–160, 2016
work page 2016
-
[10]
Exponential convergence of a nonlinear attitude estimator,
——, “Exponential convergence of a nonlinear attitude estimator,” Automatica, vol. 72, pp. 11–18, 2016
work page 2016
-
[11]
On the design of attitude complementary filters on so(3),
S. Berkane and A. Tayebi, “On the design of attitude complementary filters on so(3),”IEEE Transactions on Automatic Control, vol. 63, no. 3, pp. 880–887, 2017
work page 2017
-
[12]
Three-axis attitude determina- tion using incomplete vector observations,
S.-H. Lee, H.-S. Ahn, and K.-L. Yong, “Three-axis attitude determina- tion using incomplete vector observations,”Acta Astronautica, vol. 65, pp. 1089–1093, 10 2009
work page 2009
-
[13]
Geometrical attitude determination al- gorithm based on vector measurements,
H.-S. Ahn and S.-H. Lee, “Geometrical attitude determination al- gorithm based on vector measurements,”Transactions of the Japan Society for Aeronautical and Space Sciences, vol. 53, pp. 8–18, 2010
work page 2010
-
[14]
Orientation information extraction using three components of vector observations,
G. Shi and Y . Geng, “Orientation information extraction using three components of vector observations,”IEEE Sensors Journal, vol. 23, pp. 1249–1260, 1 2023
work page 2023
-
[15]
Attitude estimation using scalar measurements,
H. Alnahhal, S. Benahmed, S. Berkane, and T. Hamel, “Attitude estimation using scalar measurements,”IEEE Control Systems Letters, vol. 9, pp. 1862–1867, 2025
work page 2025
-
[16]
Riccati observers for the nonstationary pnp problem,
T. Hamel and C. Samson, “Riccati observers for the nonstationary pnp problem,”IEEE Transactions on Automatic Control, vol. 63, pp. 726–741, 3 2018
work page 2018
-
[17]
Scalar-measurement attitude estimation onSO(3) with bias compensation,
A. Melis, T. Bouazza, H. Alnahhal, S. Benahmed, S. Berkane, and T. Hamel, “Scalar-measurement attitude estimation onSO(3) with bias compensation,” 2026, accepted to ICRA 2026. [Online]. Available: https://arxiv.org/abs/2603.02478
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.