Recognition: unknown
Online Intention Prediction via Control-Informed Learning
Pith reviewed 2026-05-10 17:28 UTC · model grok-4.3
The pith
A shifting-horizon inverse optimal control method updates intention parameters online to predict time-varying goals of agents with unknown dynamics.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that intention can be estimated in real time by treating it as a static parameter within each shifting horizon window of an inverse optimal control problem, then applying online control-informed learning to compute gradients and update the parameter despite time variation and unknown system elements.
What carries the argument
The shifting horizon strategy that discounts outdated data together with online control-informed learning that enables direct gradient computation for parameter updates in the objective.
Load-bearing premise
Intention remains approximately constant inside each short shifting horizon window so that the discounting does not introduce large bias into the online gradient updates.
What would settle it
A sequence of experiments where the true intention switches faster than the chosen horizon length and the prediction error fails to decrease over successive windows despite the online updates.
Figures





read the original abstract
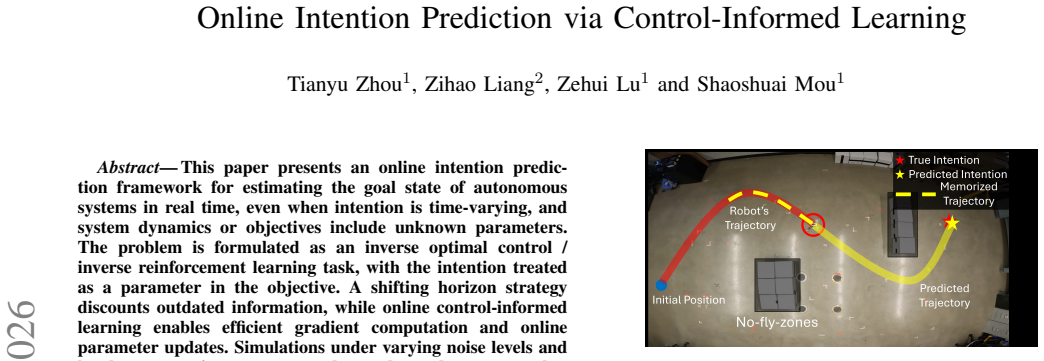
This paper presents an online intention prediction framework for estimating the goal state of autonomous systems in real time, even when intention is time-varying, and system dynamics or objectives include unknown parameters. The problem is formulated as an inverse optimal control / inverse reinforcement learning task, with the intention treated as a parameter in the objective. A shifting horizon strategy discounts outdated information, while online control-informed learning enables efficient gradient computation and online parameter updates. Simulations under varying noise levels and hardware experiments on a quadrotor drone demonstrate that the proposed approach achieves accurate, adaptive intention prediction in complex environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to present an online intention prediction framework for autonomous systems with potentially time-varying goals. It formulates the problem as an inverse optimal control/inverse reinforcement learning task treating intention as a parameter in the objective, uses a shifting horizon to discount old information, and applies online control-informed learning for efficient gradient-based updates. Validation is provided via simulations under noise and hardware tests on a quadrotor drone showing accurate adaptive prediction.
Significance. Should the quantitative validation and bias analysis be strengthened, the method could contribute to adaptive control and human-robot interaction by allowing real-time inference of changing intentions without full re-optimization. The hardware experiments add practical value, and the control-informed aspect for gradients is a potential efficiency gain over standard IRL approaches.
major comments (2)
- [Abstract] The central claim that the proposed approach 'achieves accurate, adaptive intention prediction' is asserted without any reported quantitative metrics such as prediction errors, convergence rates, or comparisons to baselines; this is load-bearing as the soundness of the simulations and hardware results cannot be assessed.
- [Abstract] The shifting-horizon strategy discounts outdated information while treating intention as a static parameter in the objective for each window; however, no error bound, analysis of bias for intra-window intention changes, or adaptive horizon mechanism is described, which risks systematic errors in the online gradient updates when intention varies on similar timescales.
minor comments (1)
- [Abstract] Notation for the objective function and the specific form of the control-informed learning (e.g., how gradients are computed efficiently) is not detailed, which could aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which highlight opportunities to strengthen the presentation of our results and the analysis of the shifting-horizon approach. We address each major comment below and outline the corresponding revisions.
read point-by-point responses
-
Referee: [Abstract] The central claim that the proposed approach 'achieves accurate, adaptive intention prediction' is asserted without any reported quantitative metrics such as prediction errors, convergence rates, or comparisons to baselines; this is load-bearing as the soundness of the simulations and hardware results cannot be assessed.
Authors: We agree that the abstract should include concrete quantitative support for the central claim. The manuscript body reports simulation results with mean prediction errors under varying noise levels, adaptation times, and comparisons to a standard batch IOC baseline, as well as hardware tracking errors on the quadrotor. To make these results immediately accessible, we will revise the abstract to incorporate key metrics (e.g., average prediction error of X% and convergence within Y steps) and a brief statement of the baseline comparison. This change will allow readers to evaluate the claim without first reading the full results section. revision: yes
-
Referee: [Abstract] The shifting-horizon strategy discounts outdated information while treating intention as a static parameter in the objective for each window; however, no error bound, analysis of bias for intra-window intention changes, or adaptive horizon mechanism is described, which risks systematic errors in the online gradient updates when intention varies on similar timescales.
Authors: The shifting-horizon formulation explicitly treats intention as constant within each finite window to enable efficient online gradient updates via control-informed learning; the horizon length is chosen to balance recency and data sufficiency. We acknowledge that a formal error bound or bias analysis for rapid intra-window changes is not provided in the current manuscript. Simulations do include cases with time-varying intentions at different rates and demonstrate stable prediction under noise, but these are empirical. We will add a dedicated paragraph in the method section discussing the bias implications of the piecewise-constant assumption, supported by additional simulation results that vary the rate of intention change relative to the horizon. An adaptive horizon mechanism is a natural extension but lies outside the scope of this work; we will note this limitation explicitly. revision: partial
Circularity Check
Intention prediction reduces to online fitting of the parameter defined in the objective
specific steps
-
fitted input called prediction
[Abstract]
"The problem is formulated as an inverse optimal control / inverse reinforcement learning task, with the intention treated as a parameter in the objective. A shifting horizon strategy discounts outdated information, while online control-informed learning enables efficient gradient computation and online parameter updates."
Intention is defined as the parameter inside the objective; the method then performs online gradient-based updates to that parameter and presents the updated value as the intention prediction. The accuracy demonstrated in simulation and hardware experiments is therefore the accuracy of the online fit, not a separate prediction step.
full rationale
The paper formulates intention prediction as an IOC/IRL problem where intention is explicitly a parameter inside the objective function for each shifting-horizon window. Online gradient updates are then used to adapt this same parameter. Because the reported 'prediction' is the output of these updates, the accuracy metric is statistically tied to the quality of the fit itself rather than an independent forecast. This matches the fitted-input-called-prediction pattern; the central claim therefore contains partial circularity. No self-citation chain or uniqueness theorem is invoked in the provided text, so the score is not raised to 8-10.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Human intent prediction using markov decision processes,
C. L. McGhan, A. Nasir, and E. M. Atkins, “Human intent prediction using markov decision processes,”Journal of Aerospace Information Systems, vol. 12, no. 5, pp. 393–397, 2015
work page 2015
-
[2]
Spatiotemporal relationship reasoning for pedestrian intent prediction,
B. Liu, E. Adeli, Z. Cao, K.-H. Lee, A. Shenoi, A. Gaidon, and J. C. Niebles, “Spatiotemporal relationship reasoning for pedestrian intent prediction,”IEEE RA-L, vol. 5, no. 2, pp. 3485–3492, 2020
work page 2020
-
[3]
Human motion trajectory prediction: A survey,
A. Rudenko, L. Palmieri, M. Herman, K. M. Kitani, D. M. Gavrila, and K. O. Arras, “Human motion trajectory prediction: A survey,”Int. J. Robot. Res., vol. 39, no. 8, pp. 895–935, 2020
work page 2020
-
[4]
A survey on trajectory-prediction methods for autonomous driving,
Y . Huang, J. Du, Z. Yang, Z. Zhou, L. Zhang, and H. Chen, “A survey on trajectory-prediction methods for autonomous driving,” IEEE Trans. Intell. Veh., vol. 7, no. 3, pp. 652–674, 2022
work page 2022
-
[5]
Model-based threat assessment for avoiding arbitrary vehicle collisions,
M. Br ¨annstr¨om, E. Coelingh, and J. Sj ¨oberg, “Model-based threat assessment for avoiding arbitrary vehicle collisions,”IEEE Trans. Intell. Transp. Syst., vol. 11, no. 3, pp. 658–669, 2010
work page 2010
-
[6]
V . Lefkopoulos, M. Menner, A. Domahidi, and M. N. Zeilinger, “Interaction-aware motion prediction for autonomous driving: A mul- tiple model kalman filtering scheme,”IEEE RA-L, vol. 6, no. 1, pp. 80–87, 2020
work page 2020
-
[7]
Y . Wang, Z. Liu, Z. Zuo, Z. Li, L. Wang, and X. Luo, “Trajectory planning and safety assessment of autonomous vehicles based on motion prediction and model predictive control,”IEEE IEEE Trans. Veh. Technol., vol. 68, no. 9, pp. 8546–8556, 2019
work page 2019
-
[8]
Modeling multi-vehicle interaction scenarios using gaussian random field,
Y . Guo, V . V . Kalidindi, M. Arief, W. Wang, J. Zhu, H. Peng, and D. Zhao, “Modeling multi-vehicle interaction scenarios using gaussian random field,” in2019 IEEE ITSC. IEEE, 2019, pp. 3974–3980
work page 2019
-
[9]
Learning-based approach for online lane change intention prediction,
P. Kumar, M. Perrollaz, S. Lefevre, and C. Laugier, “Learning-based approach for online lane change intention prediction,” in2013 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2013, pp. 797–802
work page 2013
-
[10]
Pedestrian trajectory predic- tion combining probabilistic reasoning and sequence learning,
Y . Li, X.-Y . Lu, J. Wang, and K. Li, “Pedestrian trajectory predic- tion combining probabilistic reasoning and sequence learning,”IEEE Trans. Intell. Veh., vol. 5, no. 3, pp. 461–474, 2020
work page 2020
-
[11]
Forecasting trajectory and behavior of road-agents using spectral clustering in graph-lstms,
R. Chandra, T. Guan, S. Panuganti, T. Mittal, U. Bhattacharya, A. Bera, and D. Manocha, “Forecasting trajectory and behavior of road-agents using spectral clustering in graph-lstms,”IEEE RA-L, vol. 5, no. 3, pp. 4882–4890, 2020
work page 2020
-
[12]
Densetnt: End-to-end trajectory predic- tion from dense goal sets,
J. Gu, C. Sun, and H. Zhao, “Densetnt: End-to-end trajectory predic- tion from dense goal sets,” inProceedings of the IEEE/CVF ICCV, 2021, pp. 15 303–15 312
work page 2021
-
[13]
Imitation learning for human pose prediction,
B. Wang, E. Adeli, H.-k. Chiu, D.-A. Huang, and J. C. Niebles, “Imitation learning for human pose prediction,” inProceedings of the IEEE/CVF ICCV, 2019, pp. 7124–7133
work page 2019
-
[14]
Between imitation and intention learning
J. MacGlashan and M. L. Littman, “Between imitation and intention learning.” inIJCAI, vol. 15, 2015, pp. 3692–3698
work page 2015
-
[15]
Apprenticeship learning via inverse rein- forcement learning,
P. Abbeel and A. Y . Ng, “Apprenticeship learning via inverse rein- forcement learning,” inICML, 2004, pp. 1–8
work page 2004
-
[16]
Maximum entropy inverse reinforcement learning,
B. D. Ziebart, A. Maas, J. A. Bagnell, and A. K. Dey, “Maximum entropy inverse reinforcement learning,” inAAAI Conference on Arti- ficial Intelligence, 2008, pp. 1433–1438
work page 2008
-
[17]
An iterative method for inverse optimal control,
Z. Liang, W. Jin, and S. Mou, “An iterative method for inverse optimal control,” in2022 ASCC, 2022, pp. 959–964
work page 2022
-
[18]
Z. Wu, L. Sun, W. Zhan, C. Yang, and M. Tomizuka, “Efficient sampling-based maximum entropy inverse reinforcement learning with application to autonomous driving,”IEEE RA-L, vol. 5, no. 4, pp. 5355–5362, 2020
work page 2020
-
[19]
Driving behavior modeling using naturalistic human driving data with inverse reinforcement learning,
Z. Huang, J. Wu, and C. Lv, “Driving behavior modeling using naturalistic human driving data with inverse reinforcement learning,” IEEE Trans. Intell. Transp. Syst., vol. 23, no. 8, pp. 10 239–10 251, 2021
work page 2021
-
[20]
Tnt: Target-driven trajectory prediction,
H. Zhao, J. Gao, T. Lan, C. Sun, B. Sapp, B. Varadarajan, Y . Shen, Y . Shen, Y . Chai, C. Schmidet al., “Tnt: Target-driven trajectory prediction,” inCoRL. PMLR, 2021, pp. 895–904
work page 2021
-
[21]
Model-based imitation learn- ing for urban driving,
A. Hu, G. Corrado, N. Griffiths, Z. Murez, C. Gurau, H. Yeo, A. Kendall, R. Cipolla, and J. Shotton, “Model-based imitation learn- ing for urban driving,” inNeurIPS, 2022, pp. 20 703–20 716
work page 2022
-
[22]
A structured prediction approach for robot imitation learning,
A. Duan, I. Batzianoulis, R. Camoriano, L. Rosasco, D. Pucci, and A. Billard, “A structured prediction approach for robot imitation learning,”Int. J. Robot. Res., vol. 43, no. 2, pp. 113–133, 2024
work page 2024
-
[23]
Pontryagin differentiable programming: An end-to-end learning and control framework,
W. Jin, Z. Wang, Z. Yang, and S. Mou, “Pontryagin differentiable programming: An end-to-end learning and control framework,” in NeurIPS, 2020, pp. 7979–7992
work page 2020
-
[24]
A data-driven approach for inverse optimal control,
Z. Liang, W. Hao, and S. Mou, “A data-driven approach for inverse optimal control,” in2023 IEEE CDC, 2023, pp. 3632–3637
work page 2023
-
[25]
Online control-informed learning,
Z. Liang, T. Zhou, Z. Lu, and S. Mou, “Online control-informed learning,”Transactions on Machine Learning Research, 2025
work page 2025
-
[26]
Safe online control-informed learning,
T. Zhou, Z. Liang, Z. Lu, and S. Mou, “Safe online control-informed learning,”IEEE Control Systems Letters, vol. 9, pp. 3083–3088, 2025
work page 2025
-
[27]
An irl approach for cyber-physical attack intention prediction and recovery,
M. Elnaggar and N. Bezzo, “An irl approach for cyber-physical attack intention prediction and recovery,” in2018 Annual American Control Conference (ACC). IEEE, 2018, pp. 222–227
work page 2018
-
[28]
Bayesian intention inference for trajectory prediction with an unknown goal destination,
G. Best and R. Fitch, “Bayesian intention inference for trajectory prediction with an unknown goal destination,” in2015 IEEE/RSJ IROS. IEEE, 2015, pp. 5817–5823
work page 2015
-
[29]
M. Boutayeb, H. Rafaralahy, and M. Darouach, “Convergence analysis of the extended kalman filter used as an observer for nonlinear deterministic discrete-time systems,”IEEE Transactions on Automatic Control, vol. 42, no. 4, pp. 581–586, 2002
work page 2002
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.