Recognition: unknown
Mining Attribute Subspaces for Efficient Fine-tuning of 3D Foundation Models
Pith reviewed 2026-05-10 16:24 UTC · model grok-4.3
The pith
Subspaces extracted from synthetic 3D variations combine into a compact LoRA adapter that raises fine-tuning accuracy on real data
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
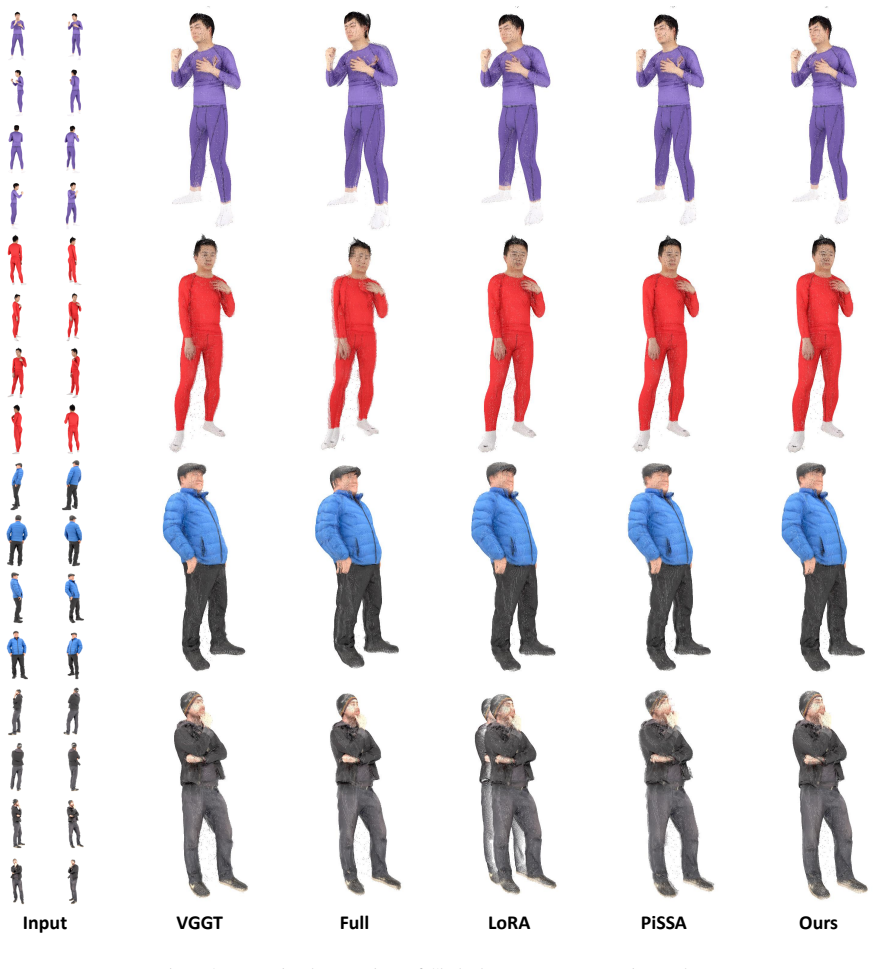
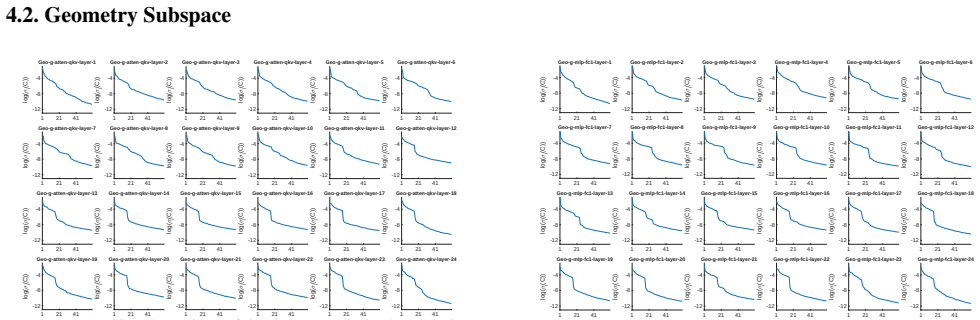
LoRA subspaces tied to individual attribute variations in 3D data can be isolated from synthetic datasets with controlled changes, are approximately disentangled from one another, and can be integrated into a reduced subspace that supports more accurate and parameter-efficient fine-tuning while generalizing from synthetic to real data.
What carries the argument
The reduced LoRA subspace formed by mining and combining attribute-specific subspaces extracted from synthetic 3D data.
If this is right
- The reduced subspace uses far fewer trainable parameters than full LoRA yet produces higher task accuracy.
- Subspaces for individual attributes can be precomputed once from synthetic data and reused across multiple downstream tasks.
- Ablation results confirm that both isolation of variations and their subsequent recombination are necessary for the accuracy gain.
- The approach removes the need to collect large real 3D datasets solely for adapter design.
Where Pith is reading between the lines
- If the subspaces prove stable across model scales, practitioners could maintain a shared library of attribute subspaces and compose task-specific adapters on demand.
- The observed orthogonality opens the possibility of modular fine-tuning where only the subspaces relevant to a given task are activated, further reducing compute.
- The same mining procedure might be applied to other modalities, such as video or 4D data, whenever synthetic renderers can isolate attribute changes.
- Whether the same subspaces remain effective when the base foundation model is updated or replaced is left open by the current experiments.
Load-bearing premise
Controlled synthetic variations in texture, geometry, camera motion, and lighting capture enough of the statistical structure of real 3D scenes that subspaces derived from them remain useful on real data.
What would settle it
A controlled experiment in which the reduced synthetic subspace is used to fine-tune on a held-out real 3D benchmark and yields lower accuracy than standard full LoRA would falsify the generalization claim.
Figures






























read the original abstract
With the emergence of 3D foundation models, there is growing interest in fine-tuning them for downstream tasks, where LoRA is the dominant fine-tuning paradigm. As 3D datasets exhibit distinct variations in texture, geometry, camera motion, and lighting, there are interesting fundamental questions: 1) Are there LoRA subspaces associated with each type of variation? 2) Are these subspaces disentangled (i.e., orthogonal to each other)? 3) How do we compute them effectively? This paper provides answers to all these questions. We introduce a robust approach that generates synthetic datasets with controlled variations, fine-tunes a LoRA adapter on each dataset, and extracts a LoRA sub-space associated with each type of variation. We show that these subspaces are approximately disentangled. Integrating them leads to a reduced LoRA subspace that enables efficient LoRA fine-tuning with improved prediction accuracy for downstream tasks. In particular, we show that such a reduced LoRA subspace, despite being derived entirely from synthetic data, generalizes to real datasets. An ablation study validates the effectiveness of the choices in our approach.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a method for mining attribute-specific LoRA subspaces from 3D foundation models using synthetic data with isolated controls over texture, geometry, camera motion, and lighting. By fine-tuning separate LoRA adapters on these controlled datasets and extracting the associated subspaces, the authors claim these subspaces are approximately disentangled. They further propose integrating these subspaces into a reduced LoRA subspace that facilitates efficient fine-tuning and yields higher accuracy on downstream tasks. A key result is that this reduced subspace, extracted entirely from synthetic data, generalizes effectively to real 3D datasets, as validated through ablation studies.
Significance. Should the synthetic-to-real generalization be rigorously demonstrated with quantitative evidence, this approach could have substantial impact on the field of 3D computer vision by enabling more parameter-efficient and data-efficient fine-tuning of large foundation models. It provides a novel way to decompose and recombine adaptation subspaces based on semantic attributes, which could lead to more interpretable and composable fine-tuning strategies. The reliance on synthetic data for subspace discovery is particularly promising for scenarios where real annotated data is scarce, provided the domain gap is adequately bridged.
major comments (2)
- §4 (Experiments) and abstract: The central generalization claim—that the reduced LoRA subspace derived from synthetic data improves prediction accuracy on real datasets—is stated without any quantitative support such as specific accuracy values, baseline comparisons, or statistical measures. This is load-bearing because the efficiency and accuracy benefits are the primary motivation, and without numbers or figures, the result cannot be evaluated.
- §3 (Method): The extraction of LoRA subspaces from fine-tuned adapters is described conceptually but lacks a precise mathematical formulation or algorithm (e.g., no equation defining the subspace projection or mining procedure). This makes it difficult to assess how 'approximately disentangled' is quantified, such as through orthogonality measures or correlation metrics between subspaces.
minor comments (2)
- Abstract: The abstract mentions an ablation study but does not specify which choices were ablated or the outcomes, which would help in understanding the robustness of the approach.
- Throughout: Some notation for LoRA subspaces (e.g., how the reduced subspace is denoted) could be clarified with consistent symbols across sections to improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and will make the indicated revisions to improve clarity and rigor.
read point-by-point responses
-
Referee: §4 (Experiments) and abstract: The central generalization claim—that the reduced LoRA subspace derived from synthetic data improves prediction accuracy on real datasets—is stated without any quantitative support such as specific accuracy values, baseline comparisons, or statistical measures. This is load-bearing because the efficiency and accuracy benefits are the primary motivation, and without numbers or figures, the result cannot be evaluated.
Authors: We acknowledge that while the abstract and §4 describe the synthetic-to-real generalization and reference supporting ablation studies, explicit numerical accuracy values, direct baseline comparisons (e.g., against vanilla LoRA), and statistical measures are not presented for this claim. We will revise the manuscript to add these quantitative results in §4, including tables reporting accuracy on real datasets, comparisons to baselines, and any relevant statistical analysis. revision: yes
-
Referee: §3 (Method): The extraction of LoRA subspaces from fine-tuned adapters is described conceptually but lacks a precise mathematical formulation or algorithm (e.g., no equation defining the subspace projection or mining procedure). This makes it difficult to assess how 'approximately disentangled' is quantified, such as through orthogonality measures or correlation metrics between subspaces.
Authors: We agree that a formal mathematical treatment is needed for precision and reproducibility. In the revision we will add explicit equations defining the LoRA subspace extraction, the projection operator, and the mining procedure. We will also formalize the quantification of approximate disentanglement (e.g., via orthogonality metrics such as the norm of cross-subspace inner products) and include pseudocode for the full algorithm. revision: yes
Circularity Check
No significant circularity; empirical extraction and validation chain is self-contained
full rationale
The paper's core procedure—generating synthetic datasets with isolated controls on texture/geometry/camera/lighting, fine-tuning separate LoRA adapters, extracting subspaces, verifying approximate orthogonality, and integrating into a reduced subspace—is a data-driven pipeline whose outputs (disentanglement and synthetic-to-real generalization) are presented as empirical observations validated by ablation studies rather than algebraic identities or self-referential definitions. No equation or claim reduces a claimed result to a fitted quantity defined from the same inputs by construction, and no load-bearing premise rests on self-citation chains. The generalization statement is an experimental finding, not a tautology derived from the synthetic generation process itself.
Axiom & Free-Parameter Ledger
free parameters (2)
- LoRA rank
- Number of synthetic variation axes
axioms (2)
- domain assumption LoRA parameter updates for different scene attributes occupy approximately orthogonal subspaces
- domain assumption Synthetic datasets with isolated attribute changes produce subspaces representative of real data distributions
Reference graph
Works this paper leans on
-
[1]
High-fidelity 3d human digitization from single 2k resolution images
Sang-Hun Han, Min-Gyu Park, Ju Hong Yoon, Ju-Mi Kang, Young-Jae Park, and Hae-Gon Jeon. High-fidelity 3d human digitization from single 2k resolution images. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 12869–12879, 2023. 1
2023
-
[2]
Megasynth: Scaling up 3d scene reconstruction with synthesized data
Hanwen Jiang, Zexiang Xu, Desai Xie, Ziwen Chen, Haian Jin, Fujun Luan, Zhixin Shu, Kai Zhang, Sai Bi, Xin Sun, et al. Megasynth: Scaling up 3d scene reconstruction with synthesized data. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 16441–16452, 2025. 1
2025
-
[3]
Matsynth: A modern pbr materials dataset
Giuseppe Vecchio and Valentin Deschaintre. Matsynth: A modern pbr materials dataset. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 22109–22118, 2024. 1
2024
-
[4]
Function4d: Real-time human vol- umetric capture from very sparse consumer rgbd sensors
Tao Yu, Zerong Zheng, Kaiwen Guo, Pengpeng Liu, Qiong- hai Dai, and Yebin Liu. Function4d: Real-time human vol- umetric capture from very sparse consumer rgbd sensors. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 5746–5756, 2021. 1
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.