DeepShapeMatchingKit: Accelerated Functional Map Solver and Shape Matching Pipelines Revisited
Pith reviewed 2026-05-10 15:23 UTC · model grok-4.3
The pith
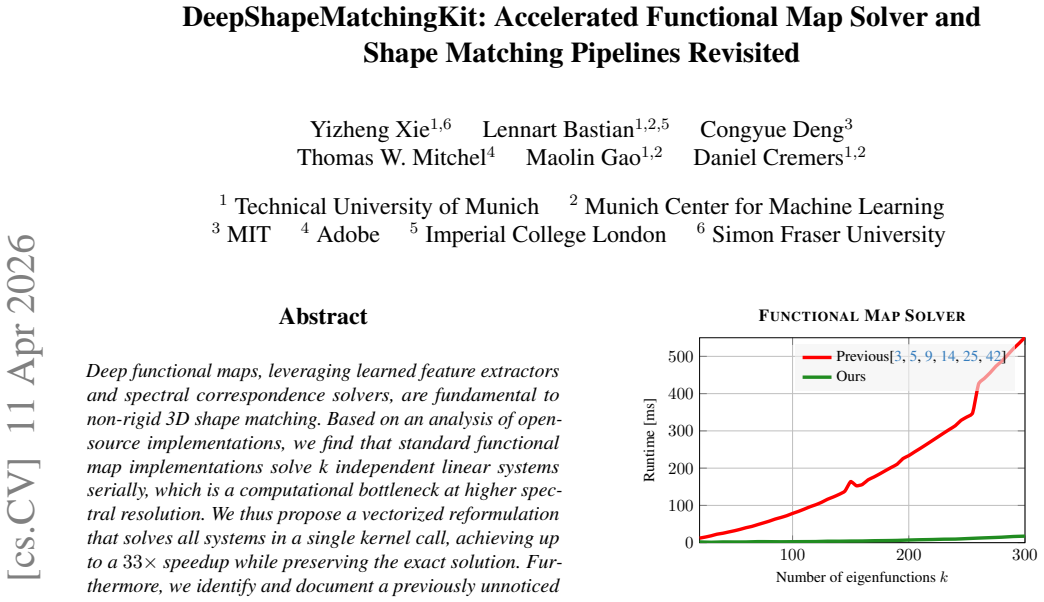
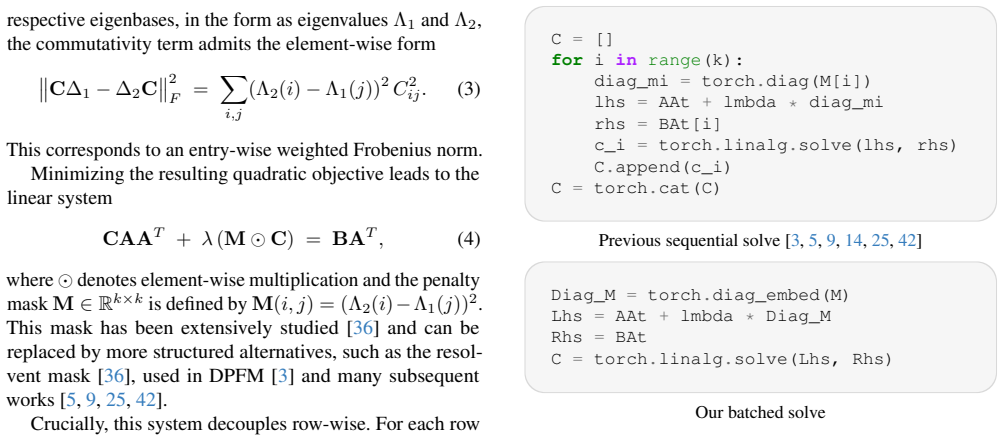
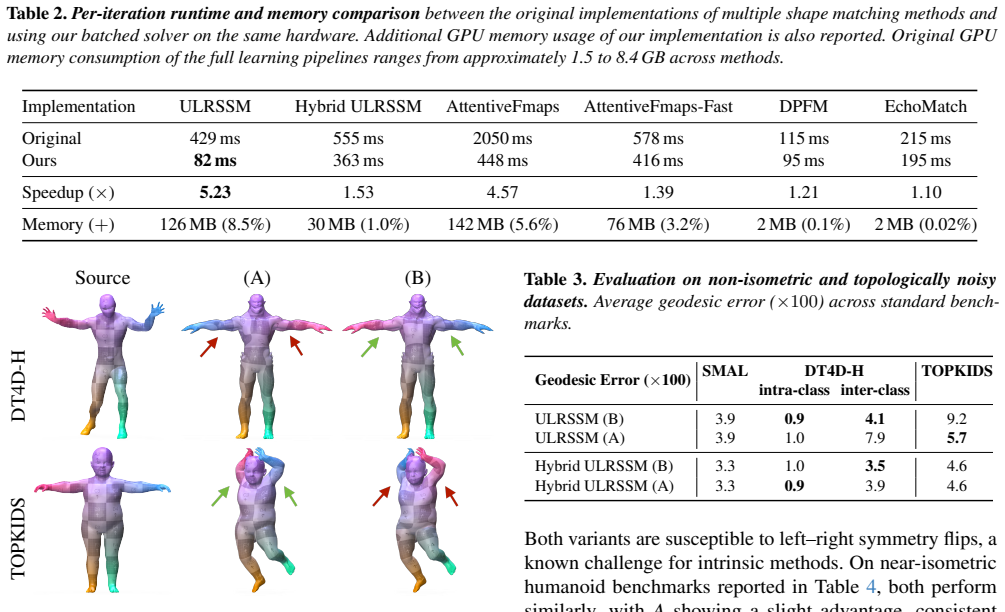
Reformulating the functional map solver to handle all linear systems in one vectorized operation delivers up to 33 times faster computation while producing identical results.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
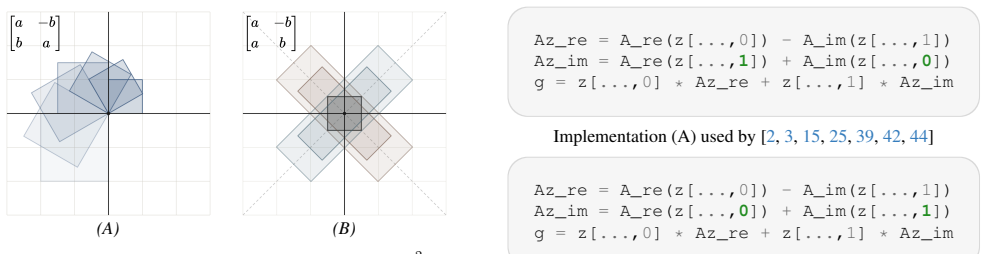
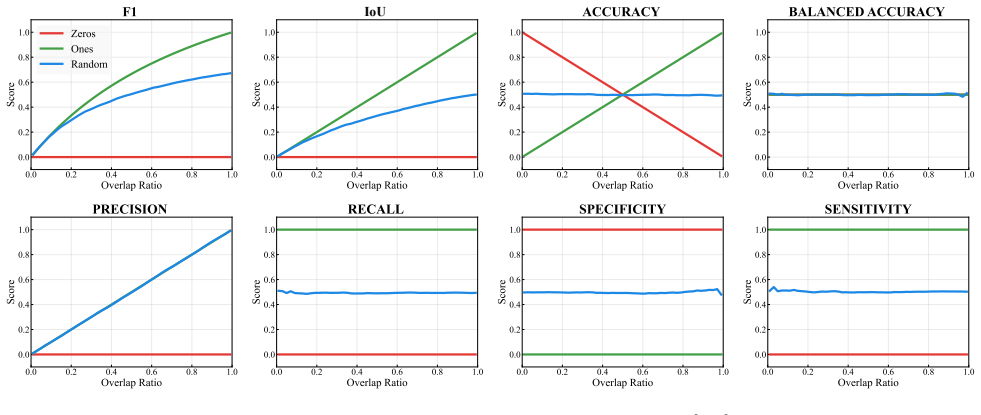
The central claim is that serial solution of k independent linear systems forms the main runtime bottleneck in existing functional map pipelines. A vectorized reformulation solves every system inside one kernel call, achieving up to 33x speedup while preserving the exact solution under the same floating-point arithmetic. The paper additionally documents an unnoticed divergence in the spatial gradient features of DiffusionNet, where two variants encode different families of tangent-plane transformations, and reports their differing empirical behaviors across benchmarks. It demonstrates that balanced accuracy supplies a complementary signal for overlap prediction under varying overlap ratios.
What carries the argument
Vectorized reformulation of the functional map linear-system solver that collapses k independent solves into a single kernel call.
If this is right
- Higher spectral resolutions become practical without prohibitive runtime cost.
- Existing deep functional map pipelines can adopt the change with no change to learned weights or final matching accuracy.
- Standardized training and evaluation code in the released toolkit reduces implementation variance across methods.
- Balanced accuracy becomes a routine secondary metric for partial matching experiments.
- The two documented variants of DiffusionNet gradient features can be chosen deliberately based on benchmark behavior.
Where Pith is reading between the lines
- The same vectorization pattern could be applied to other spectral geometry algorithms that repeatedly solve small independent systems.
- Real-time or interactive 3D shape matching applications may now become feasible on consumer hardware.
- Adoption of the toolkit would make future comparisons between shape matching methods more reproducible by default.
- Further tests on noisy or incomplete scans could reveal which of the two DiffusionNet variants is more robust in practice.
Load-bearing premise
The dominant slowdown in current implementations comes from solving each linear system separately rather than together, and the vectorized code will return numerically identical results under the same floating-point conditions.
What would settle it
Running the original serial solver and the proposed vectorized version on identical inputs and basis counts, then checking whether the outputs match to machine precision and whether wall-clock time drops by a large factor.
Figures
read the original abstract
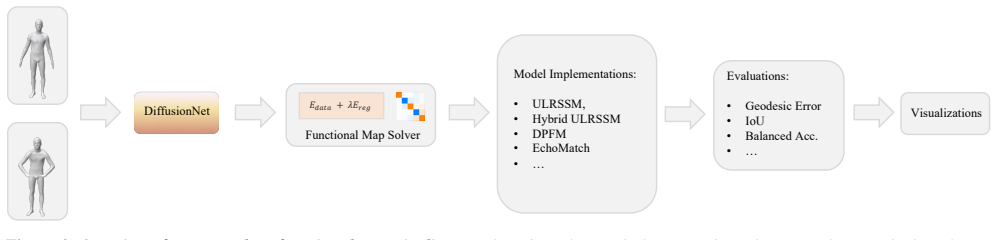
Deep functional maps, leveraging learned feature extractors and spectral correspondence solvers, are fundamental to non-rigid 3D shape matching. Based on an analysis of open-source implementations, we find that standard functional map implementations solve k independent linear systems serially, which is a computational bottleneck at higher spectral resolution. We thus propose a vectorized reformulation that solves all systems in a single kernel call, achieving up to a 33x speedup while preserving the exact solution. Furthermore, we identify and document a previously unnoticed implementation divergence in the spatial gradient features of the mainstay DiffusionNet: two variants that parameterize distinct families of tangent-plane transformations, and present experiments analyzing their respective behaviors across diverse benchmarks. We additionally revisit overlap prediction evaluation for partial-to-partial matching and show that balanced accuracy provides a useful complementary metric under varying overlap ratios. To share these advancements with the wider community, we present an open-source codebase, DeepShapeMatchingKit, that incorporates these improvements and standardizes training, evaluation, and data pipelines for common deep shape matching methods. The codebase is available at: https://github.com/xieyizheng/DeepShapeMatchingKit
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper analyzes open-source functional map implementations in deep non-rigid 3D shape matching and identifies serial solution of k independent linear systems as a computational bottleneck at higher spectral resolutions. It proposes a vectorized reformulation that solves all systems in a single kernel call, claiming up to 33x speedup while preserving the exact solution. The work also documents a previously unnoticed divergence in DiffusionNet spatial gradient features (two variants of tangent-plane transformations), analyzes their behaviors on benchmarks, suggests balanced accuracy as a complementary metric for overlap prediction in partial-to-partial matching, and releases the open-source DeepShapeMatchingKit codebase to standardize training, evaluation, and pipelines.
Significance. If the speedup and numerical equivalence hold under standard conditions, this is a useful engineering contribution that lowers barriers to higher-resolution spectral methods without altering outcomes. The open-source release and documentation of the DiffusionNet variants add practical value for reproducibility and implementation choices in the shape matching community. The metric suggestion for partial matching provides a straightforward complementary evaluation tool.
minor comments (3)
- The 33x speedup claim would benefit from an explicit table or section detailing the value of k (number of basis functions), hardware platform, and the exact open-source baselines profiled to allow direct reproduction of the timing results.
- In the DiffusionNet analysis section, provide the precise mathematical definitions or code snippets for the two tangent-plane transformation variants to make the divergence fully reproducible from the text alone.
- The overlap prediction experiments could include a brief statistical test or variance analysis across overlap ratios to strengthen the claim that balanced accuracy is a useful complement.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our work, the recognition of its practical value for the shape matching community, and the recommendation for minor revision. We are pleased that the vectorized solver, DiffusionNet variant analysis, balanced accuracy metric, and open-source toolkit are viewed as useful contributions.
Circularity Check
No significant circularity; central claim is a standard linear-algebra reformulation
full rationale
The paper's primary claim is a vectorized reformulation of the functional map step that solves k independent linear systems in one kernel call instead of serially. This is mathematically equivalent to the original serial solve by the properties of block-diagonal or batched linear algebra and is presented as an engineering optimization with open-source code for verification. No equations or results are defined in terms of themselves, no parameters are fitted and then relabeled as predictions, and no load-bearing premise rests on self-citations or imported uniqueness theorems. The additional observations about DiffusionNet gradient variants and overlap metrics are empirical documentation rather than derived claims that could be circular. The derivation chain is therefore self-contained against external benchmarks and implementation checks.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math Matrix operations for solving multiple independent linear systems can be batched into a single kernel while preserving exact arithmetic equivalence.
Reference graph
Works this paper leans on
-
[1]
Scape: shape completion and animation of people.ACM SIGGRAPH 2005 Papers, pages 408–416, 2005
Dragomir Anguelov, Praveen Srinivasan, Daphne Koller, Se- bastian Thrun, Jim Rodgers, and James Davis. Scape: shape completion and animation of people.ACM SIGGRAPH 2005 Papers, pages 408–416, 2005. 6
work page 2005
-
[2]
Understanding and improving features learned in deep functional maps
Souhaib Attaiki and Maks Ovsjanikov. Understanding and improving features learned in deep functional maps. InPro- ceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 1316–1326, 2023. 2, 4, 5
work page 2023
-
[3]
Dpfm: Deep partial functional maps
Souhaib Attaiki, Gautam Pai, and Maks Ovsjanikov. Dpfm: Deep partial functional maps. In2021 International Confer- ence on 3D Vision (3DV), pages 175–185. IEEE, 2021. 1, 2, 3, 4, 5, 6, 7
work page 2021
-
[4]
S3M: Scalable Statistical Shape Modeling Through Unsupervised Correspondences
Lennart Bastian, Alexander Baumann, Emily Hoppe, Vincent B¨urgin, Ha Young Kim, Mahdi Saleh, Benjamin Busam, and Nassir Navab. S3M: Scalable Statistical Shape Modeling Through Unsupervised Correspondences. InMICCAI 2023, pages 459–469, Cham, 2023. Springer Nature Switzerland. 1
work page 2023
-
[5]
Hybrid functional maps for crease-aware non- isometric shape matching
Lennart Bastian, Yizheng Xie, Nassir Navab, and Zorah L¨ahner. Hybrid functional maps for crease-aware non- isometric shape matching. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 3313–3323, 2024. 1, 2, 3, 4, 5, 8
work page 2024
-
[6]
Faust: Dataset and evaluation for 3d mesh registration
Federica Bogo, Javier Romero, Matthew Loper, and Michael J Black. Faust: Dataset and evaluation for 3d mesh registration. InCVPR, pages 3794–3801, 2014. 6
work page 2014
-
[7]
Unsupervised deep multi-shape matching
Dongliang Cao and Florian Bernard. Unsupervised deep multi-shape matching. InECCV, pages 55–71. Springer,
-
[8]
Self-supervised learning for multimodal non-rigid 3d shape matching
Dongliang Cao and Florian Bernard. Self-supervised learning for multimodal non-rigid 3d shape matching. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 17735–17744, 2023
work page 2023
-
[9]
Dongliang Cao, Paul Roetzer, and Florian Bernard. Unsu- pervised learning of robust spectral shape matching.ACM Transactions on Graphics (TOG), 42(4):1–15, 2023. 1, 2, 3, 4, 7
work page 2023
-
[10]
Spectral meets spatial: Har- monising 3d shape matching and interpolation
Dongliang Cao, Marvin Eisenberger, Nafie El Amrani, Daniel Cremers, and Florian Bernard. Spectral meets spatial: Har- monising 3d shape matching and interpolation. InCVPR,
-
[11]
Zero-shot image feature consensus with deep functional maps
Xinle Cheng, Congyue Deng, Adam W Harley, Yixin Zhu, and Leonidas Guibas. Zero-shot image feature consensus with deep functional maps. InEuropean Conference on Computer Vision, pages 277–293. Springer, 2024. 1
work page 2024
-
[12]
Shrec’16: Partial matching of deformable shapes.Proc
Luca Cosmo, Emanuele Rodola, Michael M Bronstein, An- drea Torsello, Daniel Cremers, Y Sahillioglu, et al. Shrec’16: Partial matching of deformable shapes.Proc. 3DOR, 2(9):12,
-
[13]
Texture transfer during shape transformation.ACM Transactions on Graphics (ToG), 24(2):289–310, 2005
Huong Quynh Dinh, Anthony Yezzi, and Greg Turk. Texture transfer during shape transformation.ACM Transactions on Graphics (ToG), 24(2):289–310, 2005. 1
work page 2005
-
[14]
Deep geometric functional maps: Robust feature learning for shape correspondence
Nicolas Donati, Abhishek Sharma, and Maks Ovsjanikov. Deep geometric functional maps: Robust feature learning for shape correspondence. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 8592–8601, 2020. 1, 2, 3, 4
work page 2020
-
[15]
Deep orientation-aware functional maps: Tackling symmetry issues in shape matching
Nicolas Donati, Etienne Corman, and Maks Ovsjanikov. Deep orientation-aware functional maps: Tackling symmetry issues in shape matching. InCVPR, pages 742–751, 2022. 2, 4, 5
work page 2022
-
[16]
Geometrically consis- tent partial shape matching.3DV, 2023
Viktoria Ehm, Paul Roetzer, Marvin Eisenberger, Maolin Gao, Florian Bernard, and Daniel Cremers. Geometrically consis- tent partial shape matching.3DV, 2023. 7
work page 2023
-
[17]
Partial-to-partial shape matching with geometric consistency.CVPR, 2024
Viktoria Ehm, Maolin Gao, Paul Roetzer, Marvin Eisenberger, Daniel Cremers, and Florian Bernard. Partial-to-partial shape matching with geometric consistency.CVPR, 2024. 2, 4, 5, 6, 7
work page 2024
-
[18]
Beyond complete shapes: A benchmark for quantita- tive evaluation of 3d shape matching algorithms
Viktoria Ehm, Nafie El Amrani, Yizheng Xie, Lennart Bas- tian, Maolin Gao, Weikang Wang, Lu Sang, Dongliang Cao, Tobias Weißberg, Zorah L¨ahner, Daniel Cremers, and Florian Bernard. Beyond complete shapes: A benchmark for quantita- tive evaluation of 3d shape matching algorithms. InComputer Graphics Forum, page e70186. Wiley Online Library, 2025. 6, 8
work page 2025
-
[19]
Smooth shells: Multi-scale shape registration with functional maps
Marvin Eisenberger, Zorah Lahner, and Daniel Cremers. Smooth shells: Multi-scale shape registration with functional maps. InProceedings of the IEEE/CVF Conference on Com- puter Vision and Pattern Recognition, pages 12265–12274,
- [21]
-
[22]
Marco Fumero, Marco Pegoraro, Valentino Maiorca, Francesco Locatello, and Emanuele Rodol `a. Latent func- tional maps: a spectral framework for representation align- ment.Advances in Neural Information Processing Systems, 37:66178–66203, 2024. 1
work page 2024
-
[23]
Oshri Halimi, Or Litany, Emanuele Rodola Rodola, Alex M. Bronstein, and Ron Kimmel. Unsupervised Learning of Dense Shape Correspondence. In2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 4365–4374, Long Beach, CA, USA, 2019. IEEE. 2, 3
work page 2019
-
[24]
An Elastic Basis for Spectral Shape Correspondence
Florine Hartwig, Josua Sassen, Omri Azencot, Martin Rumpf, and Mirela Ben-Chen. An Elastic Basis for Spectral Shape Correspondence. InSpecial Interest Group on Computer Graphics and Interactive Techniques Conference Conference Proceedings, pages 1–11, Los Angeles CA USA, 2023. ACM. 3
work page 2023
-
[25]
Predator: Registration of 3d point clouds with low overlap
Shengyu Huang, Zan Gojcic, Mikhail Usvyatsov, Andreas Wieser, and Konrad Schindler. Predator: Registration of 3d point clouds with low overlap. InProceedings of the IEEE/CVF Conference on computer vision and pattern recog- nition, pages 4267–4276, 2021. 2, 5
work page 2021
-
[26]
Lei Li, Nicolas Donati, and Maks Ovsjanikov. Learning multi- resolution functional maps with spectral attention for robust shape matching.Advances in Neural Information Processing Systems, 35:29336–29349, 2022. 1, 2, 3, 4, 5
work page 2022
-
[27]
4dcomplete: Non-rigid motion estimation 9 beyond the observable surface
Yang Li, Hikari Takehara, Takafumi Taketomi, Bo Zheng, and Matthias Nießner. 4dcomplete: Non-rigid motion estimation 9 beyond the observable surface. InICCV, pages 12706–12716,
-
[28]
Deep functional maps: Structured prediction for dense shape correspondence
Or Litany, Tal Remez, Emanuele Rodola, Alex Bronstein, and Michael Bronstein. Deep functional maps: Structured prediction for dense shape correspondence. InProceedings of the IEEE international conference on computer vision, pages 5659–5667, 2017. 2, 3
work page 2017
-
[29]
Z L ¨ahner, E Rodol `a, M M Bronstein, D Cremers, O Burghard, L Cosmo, A Dieckmann, R Klein, and Y Sahilliog. SHREC’16: Matching of Deformable Shapes with Topologi- cal Noise.Eurographics Workshop on 3D Object Retrieval, EG 3DOR, pages 55–60, 2016. 6
work page 2016
-
[30]
pyfm / pyfmaps: Python functional maps library, 2025
Robin Magnet. pyfm / pyfmaps: Python functional maps library, 2025. 2, 3
work page 2025
-
[31]
Memory-scalable and simplified functional map learning
Robin Magnet and Maks Ovsjanikov. Memory-scalable and simplified functional map learning. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 4041–4050, 2024. 2
work page 2024
-
[32]
Smooth non-rigid shape matching via effective dirichlet energy optimization
Robin Magnet, Jing Ren, Olga Sorkine-Hornung, and Maks Ovsjanikov. Smooth non-rigid shape matching via effective dirichlet energy optimization. In3DV, pages 495–504. IEEE,
- [33]
-
[34]
Thomas Mitchel, Michael J Taylor, and Vincent Sitzmann. Neural isometries: Taming transformations for equivariant ml.Advances in Neural Information Processing Systems, 37: 7311–7338, 2024. 2
work page 2024
-
[35]
Maks Ovsjanikov, Mirela Ben-Chen, Justin Solomon, Adrian Butscher, and Leonidas Guibas. Functional maps: a flexible representation of maps between shapes.ACM Transactions on Graphics (ToG), 31(4):1–11, 2012. 1, 2, 3
work page 2012
-
[36]
Computing and processing correspondences with functional maps
Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodol`a, Mirela Ben-Chen, Leonidas Guibas, Fred- eric Chazal, and Alex Bronstein. Computing and processing correspondences with functional maps. InACM SIGGRAPH 2017 Courses, pages 5:1–5:62, 2017. 3
work page 2017
-
[37]
Structured regularization of functional map computations
Jing Ren, Mikhail Panine, Peter Wonka, and Maks Ovsjanikov. Structured regularization of functional map computations. InComputer Graphics Forum, pages 39–53. Wiley Online Library, 2019. 4
work page 2019
-
[38]
Spidermatch: 3d shape matching with global optimality and geometric consistency
Paul Roetzer and Florian Bernard. Spidermatch: 3d shape matching with global optimality and geometric consistency. InCVPR, 2024. 2, 4, 5, 7
work page 2024
-
[39]
Unsupervised deep learning for structured shape matching
Jean-Michel Roufosse, Abhishek Sharma, and Maks Ovs- janikov. Unsupervised deep learning for structured shape matching. InProceedings of the IEEE International Confer- ence on Computer Vision, pages 1617–1627, 2019. 3
work page 2019
-
[40]
Nicholas Sharp, Souhaib Attaiki, Keenan Crane, and Maks Ovsjanikov. Diffusionnet: Discretization agnostic learning on surfaces.ACM Transactions on Graphics (TOG), 41(3):1–16,
-
[41]
Pereira, Nina Mi- olane, and Simone Melzi
Giulio Vigan`o, Giorgio Longari, Lu ´ıs F. Pereira, Nina Mi- olane, and Simone Melzi. Geomfum: A python package for machine learning with functional maps.Geometric Intelligence Lab, University of California, Santa Barbara,
- [42]
-
[43]
Yue Wang and Justin M Solomon. Prnet: Self-supervised learning for partial-to-partial registration.Advances in neural information processing systems, 32, 2019. 2, 5
work page 2019
-
[44]
Echomatch: Partial-to-partial shape matching via correspon- dence reflection
Yizheng Xie, Viktoria Ehm, Paul Roetzer, Nafie El Am- rani, Maolin Gao, Florian Bernard, and Daniel Cremers. Echomatch: Partial-to-partial shape matching via correspon- dence reflection. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 11665–11675, 2025. 1, 2, 3, 4, 5
work page 2025
-
[45]
Omnet: Learning overlapping mask for partial-to-partial point cloud registration
Hao Xu, Shuaicheng Liu, Guangfu Wang, Guanghui Liu, and Bing Zeng. Omnet: Learning overlapping mask for partial-to-partial point cloud registration. InProceedings of the IEEE/CVF international conference on computer vision, pages 3132–3141, 2021. 2, 5
work page 2021
-
[46]
Coe: Deep coupled embedding for non-rigid point cloud correspon- dences
Huajian Zeng, Maolin Gao, and Daniel Cremers. Coe: Deep coupled embedding for non-rigid point cloud correspon- dences. In2025 International Conference on 3D Vision (3DV), pages 286–295. IEEE, 2025. 2, 4, 5
work page 2025
-
[47]
Aleksei Zhuravlev, Lennart Bastian, Dongliang Cao, Nafie El Amrani, Paul Roetzer, Viktoria Ehm, Riccardo Marin, Hi- roki Nishizawa, Shigeo Morishima, Christian Theobalt, Nas- sir Navab, Daniel Cremers, Florian Bernard, Zorah L ¨ahner, and Vladislav Golyanik. Non-rigid 3d shape correspondences: From foundations to open challenges and opportunities.Com- put...
work page 2026
-
[48]
Silvia Zuffi, Angjoo Kanazawa, David Jacobs, and Michael J. Black. 3D menagerie: Modeling the 3D shape and pose of animals. InCVPR, 2017. 6 10
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.