Recognition: unknown
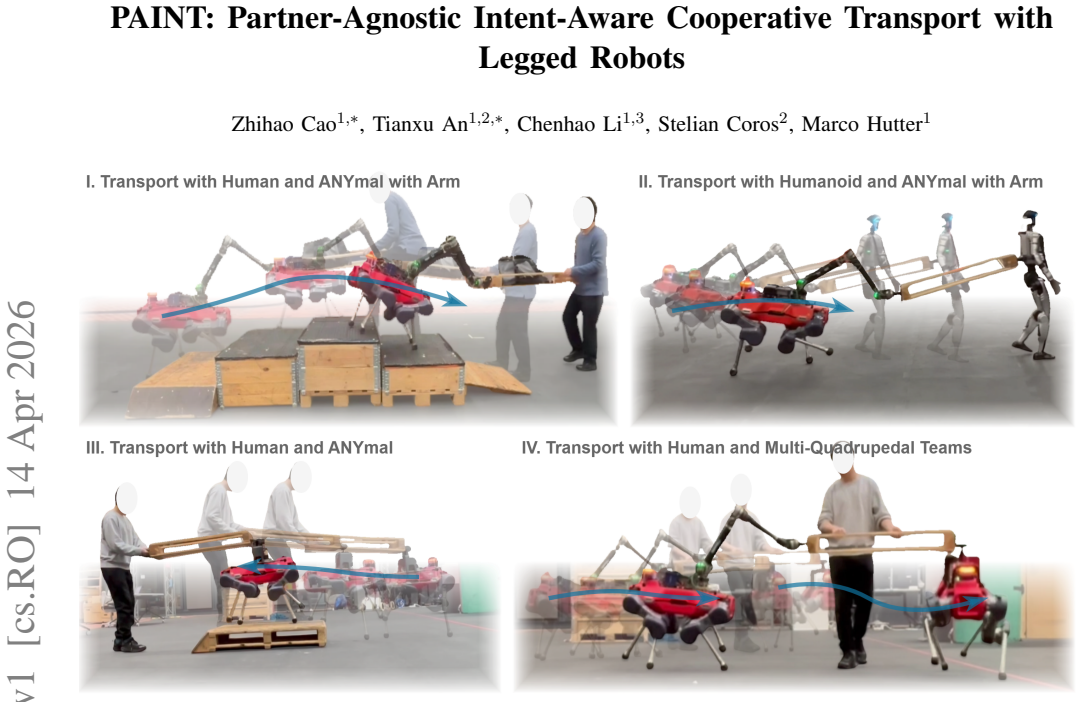
PAINT: Partner-Agnostic Intent-Aware Cooperative Transport with Legged Robots
Pith reviewed 2026-05-10 14:37 UTC · model grok-4.3
The pith
A legged robot infers its partner's transport intent from proprioceptive feedback alone to enable stable cooperative carrying without force sensors or partner models.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
PAINT decouples intent understanding from terrain-robust locomotion: a high-level policy infers the partner interaction wrench using an intent estimator and teacher-student training from proprioceptive feedback alone, while a low-level locomotion backbone ensures robust execution. This enables lightweight deployment without external force-torque sensing or payload tracking, scales to decentralized multi-robot transport, and transfers across robot embodiments by swapping the locomotion backbone.
What carries the argument
The high-level intent estimator, trained via a teacher-student scheme to recover partner interaction wrench directly from proprioceptive signals, decoupled from the low-level terrain-robust locomotion policy.
If this is right
- Compliant cooperative transport succeeds across diverse terrains, payloads, and partners without external force-torque sensors or payload tracking.
- The same learned policies scale directly to decentralized multi-robot transport.
- The framework transfers to new robot bodies simply by replacing the low-level locomotion backbone.
- Proprioceptive signals alone serve as a scalable interface for partner-agnostic, intent-aware collaboration.
Where Pith is reading between the lines
- The approach could extend to other physical collaboration tasks such as pushing large objects or coordinated lifting where explicit communication is unavailable.
- Hardware costs for collaborative robots could drop if force-torque sensors are no longer required for safe interaction.
- Teams of heterogeneous robots might coordinate transport without shared models or centralized planning by relying on the same proprioceptive inference.
Load-bearing premise
Proprioceptive signals during payload-coupled interaction contain sufficient information to accurately infer partner intent in complex environments without additional sensing or explicit modeling of the partner.
What would settle it
A controlled experiment in which the robot must maintain stable, low-force transport while the partner suddenly changes direction or applies unpredictable forces on previously unseen uneven terrain; failure to infer intent correctly would appear as excessive interaction forces or loss of balance.
Figures





read the original abstract
Collaborative transport requires robots to infer partner intent through physical interaction while maintaining stable loco-manipulation. This becomes particularly challenging in complex environments, where interaction signals are difficult to capture and model. We present PAINT, a lightweight yet efficient hierarchical learning framework for partner-agonistic intent-aware collaborative legged transport that infers partner intent directly from proprioceptive feedback. PAINT decouples intent understanding from terrain-robust locomotion: A high-level policy infers the partner interaction wrench using an intent estimator and a teacher-student training scheme, while a low-level locomotion backbone ensures robust execution. This enables lightweight deployment without external force-torque sensing or payload tracking. Extensive simulation and real-world experiments demonstrate compliant cooperative transport across diverse terrains, payloads, and partners. Furthermore, we show that PAINT naturally scales to decentralized multi-robot transport and transfers across robot embodiments by swapping the underlying locomotion backbone. Our results suggest that proprioceptive signals in payload-coupled interaction provide a scalable interface for partner-agnostic intent-aware collaborative transport.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces PAINT, a hierarchical learning framework for partner-agnostic intent-aware cooperative transport using legged robots. A high-level policy infers partner interaction wrench from proprioceptive feedback alone via an intent estimator trained with a teacher-student scheme, while a low-level locomotion backbone handles terrain-robust execution. This enables compliant transport without external force-torque sensors or payload tracking. The approach is claimed to generalize across diverse terrains, payloads, and partners, scale to decentralized multi-robot settings, and transfer across robot embodiments by swapping the locomotion backbone.
Significance. If the empirical results hold, the work offers a lightweight, sensor-minimal approach to physical human-robot collaboration that could reduce hardware complexity in cooperative legged systems. The decoupling of intent inference from locomotion and the reported cross-embodiment transfer are potentially useful contributions for scalable multi-agent transport.
major comments (3)
- [Abstract] Abstract: The abstract states that 'extensive simulation and real-world experiments demonstrate compliant cooperative transport' yet provides no quantitative metrics, baselines, success rates, or ablation results. Without these, the central claim that the intent estimator recovers partner wrench accurately enough for compliant behavior cannot be evaluated from the text.
- [Method] Method (intent estimator and teacher-student scheme): The claim that joint-level proprioceptive signals (torques, base velocities, leg states) contain separable partner-specific information rests on the assumption that terrain-induced and payload dynamics do not confound the inference. No details are given on regularization, privileged information during training, or how the estimator is prevented from overfitting to specific disturbance patterns, which directly affects the partner-agnostic guarantee.
- [Experiments] Experiments: The paper asserts generalization across 'diverse terrains, payloads, and partners' and scaling to multi-robot transport, but the absence of reported quantitative comparisons (e.g., force tracking error, success rate vs. baselines with/without intent estimation) leaves the performance advantage unverified and the load-bearing empirical support for the hierarchical split unclear.
minor comments (2)
- [Method] Notation for the interaction wrench and intent estimator output should be defined explicitly with dimensions and reference frames to avoid ambiguity when describing the teacher-student distillation.
- [Experiments] Figure captions and axis labels in the experimental results should include error bars or statistical significance indicators to support claims of robustness across conditions.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We have revised the manuscript to strengthen the presentation of quantitative results and methodological details while preserving the core contributions.
read point-by-point responses
-
Referee: [Abstract] Abstract: The abstract states that 'extensive simulation and real-world experiments demonstrate compliant cooperative transport' yet provides no quantitative metrics, baselines, success rates, or ablation results. Without these, the central claim that the intent estimator recovers partner wrench accurately enough for compliant behavior cannot be evaluated from the text.
Authors: We agree that the abstract would benefit from explicit quantitative support. In the revised version we have incorporated key metrics from our experiments, including average wrench estimation error, success rates across simulation and real-world trials, and performance deltas relative to non-intent-aware baselines, while keeping the abstract concise. revision: yes
-
Referee: [Method] Method (intent estimator and teacher-student scheme): The claim that joint-level proprioceptive signals (torques, base velocities, leg states) contain separable partner-specific information rests on the assumption that terrain-induced and payload dynamics do not confound the inference. No details are given on regularization, privileged information during training, or how the estimator is prevented from overfitting to specific disturbance patterns, which directly affects the partner-agnostic guarantee.
Authors: Section III-B describes the teacher-student scheme in which the teacher receives privileged ground-truth interaction wrenches while the student is trained on proprioception alone. Domain randomization over terrains, payloads, and partner behaviors is detailed in Section IV-A to reduce confounding. We have added an explicit paragraph on L2 regularization, early stopping, and validation on held-out disturbance patterns to further clarify how overfitting is mitigated and the partner-agnostic property is supported. revision: yes
-
Referee: [Experiments] Experiments: The paper asserts generalization across 'diverse terrains, payloads, and partners' and scaling to multi-robot transport, but the absence of reported quantitative comparisons (e.g., force tracking error, success rate vs. baselines with/without intent estimation) leaves the performance advantage unverified and the load-bearing empirical support for the hierarchical split unclear.
Authors: Section V already contains quantitative tables for force tracking error, success rates, and ablations on the intent estimator. To address the concern directly we have added explicit side-by-side comparisons against baselines without intent estimation, highlighted the contribution of the hierarchical split, and included additional metrics for multi-robot scaling and cross-embodiment transfer in the revised text and tables. revision: yes
Circularity Check
No circularity: claims rest on experimental validation of a learned hierarchical policy
full rationale
The paper presents PAINT as a hierarchical learning framework that trains an intent estimator via teacher-student distillation from proprioceptive signals to infer partner wrenches, with a separate low-level locomotion policy. No equations, derivations, or parameter-fitting steps are described that reduce the claimed inference accuracy or generalization to the inputs by construction. The central results are demonstrated through simulation and real-world experiments on varied terrains, payloads, and partners, with no load-bearing self-citations or ansatzes invoked to justify uniqueness. The approach is therefore self-contained as an empirical RL method rather than a closed mathematical loop.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Human-aware physical human–robot collaborative transportation and manipulation with multiple aerial robots.IEEE Transactions on Robotics, 41:762–781, 2024
Guanrui Li et al. Human-aware physical human–robot collaborative transportation and manipulation with multiple aerial robots.IEEE Transactions on Robotics, 41:762–781, 2024
2024
-
[2]
Yushi Du et al. Learning human-humanoid coordination for collabo- rative object carrying.arXiv:2510.14293, 2025
-
[3]
Human-robot co-carrying using visual and force sensing.IEEE Transactions on Industrial Electronics, 68(9):8657– 8666, 2020
Xinbo Yu et al. Human-robot co-carrying using visual and force sensing.IEEE Transactions on Industrial Electronics, 68(9):8657– 8666, 2020
2020
-
[4]
H2-compact: Human- humanoid co-manipulation via adaptive contact trajectory policies
Geeta Chandra Raju Bethala et al. H2-compact: Human- humanoid co-manipulation via adaptive contact trajectory policies. arXiv:2505.17627, 2025
-
[5]
A control scheme for collaborative object transportation between a human and a quadruped robot using the mighty suction cup
Konstantinos Plotas et al. A control scheme for collaborative object transportation between a human and a quadruped robot using the mighty suction cup. In2025 IEEE International Conference on Robotics and Automation (ICRA), pages 16305–16311. IEEE, 2025
2025
-
[6]
Yifei Simon Shao et al. Constraint-aware intent estimation for dynamic human-robot object co-manipulation.arXiv:2409.00215, 2024
-
[7]
Compliant control of quadruped robots for assistive load carrying.arXiv:2503.10401, 2025
Nimesh Khandelwal et al. Compliant control of quadruped robots for assistive load carrying.arXiv:2503.10401, 2025
-
[8]
Hierarchical cooperative locomotion control of human and quadruped robot based on interactive force guidance.IEEE/ASME Transactions on Mechatronics, 2025
Sai Gu et al. Hierarchical cooperative locomotion control of human and quadruped robot based on interactive force guidance.IEEE/ASME Transactions on Mechatronics, 2025
2025
-
[9]
Hao Zhang et al. Cognition to control-multi-agent learning for human- humanoid collaborative transport.arXiv:2603.03768, 2026
-
[10]
Bikram Pandit et al. Multi-quadruped cooperative object transport: Learning decentralized pinch-lift-move.arXiv:2509.14342, 2025
-
[11]
Centralized model predictive control for collaborative loco-manipulation
Flavio De Vincenti et al. Centralized model predictive control for collaborative loco-manipulation. InRobotics: Science and Systems, volume 2023, 2023
2023
-
[12]
Collabora- tive loco-manipulation for pick-and-place tasks with dynamic reward curriculum,
Tianxu An et al. Collaborative loco-manipulation for pick-and-place tasks with dynamic reward curriculum.arXiv:2509.13239, 2025
-
[13]
Learning robust perceptive locomotion for quadrupedal robots in the wild.Science robotics, 7(62):eabk2822, 2022
Takahiro Miki et al. Learning robust perceptive locomotion for quadrupedal robots in the wild.Science robotics, 7(62):eabk2822, 2022
2022
-
[14]
Attention-based map encoding for learning general- ized legged locomotion.Science Robotics, 10(105):eadv3604, 2025
Junzhe He et al. Attention-based map encoding for learning general- ized legged locomotion.Science Robotics, 10(105):eadv3604, 2025
2025
-
[15]
Learning force control for legged manipulation
Tifanny Portela et al. Learning force control for legged manipulation. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 15366–15372. IEEE, 2024
2024
-
[16]
Learning unified force and position control for legged loco-manipulation,
Peiyuan Zhi et al. Learning unified force and position control for legged loco-manipulation.arXiv:2505.20829, 2025
-
[17]
Variable impedance control of a robot for cooperation with a human
Ryojun Ikeura et al. Variable impedance control of a robot for cooperation with a human. InProceedings of 1995 IEEE international conference on robotics and automation, volume 3, pages 3097–3102. IEEE, 1995
1995
-
[18]
Pacc: A passive-arm approach for high-payload collaborative carrying with quadruped robots using model predictive control
Giulio Turrisi et al. Pacc: A passive-arm approach for high-payload collaborative carrying with quadruped robots using model predictive control. In2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 11139–11146. IEEE, 2024
2024
-
[19]
Alexander Schperberg et al. Safe whole-body loco-manipulation via combined model and learning-based control.arXiv:2603.02443, 2026
-
[20]
Hac-loco: Learning hierarchical active compliance control for quadruped locomotion under continuous external distur- bances
Xiang Zhou et al. Hac-loco: Learning hierarchical active compliance control for quadruped locomotion under continuous external distur- bances. In2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 10649–10655. IEEE, 2025
2025
-
[21]
Roboduet: Learning a cooperative policy for whole-body legged loco-manipulation.IEEE Robotics and Automation Letters, 2025
Guoping Pan et al. Roboduet: Learning a cooperative policy for whole-body legged loco-manipulation.IEEE Robotics and Automation Letters, 2025
2025
-
[22]
Learning quadrupedal locomotion over challenging terrain.Science robotics, 5(47):eabc5986, 2020
Joonho Lee et al. Learning quadrupedal locomotion over challenging terrain.Science robotics, 5(47):eabc5986, 2020
2020
-
[23]
Combining learning-based locomotion policy with model-based manipulation for legged mobile manipulators.IEEE Robotics and Automation Letters, 7(2):2377–2384, 2022
Yuntao Ma et al. Combining learning-based locomotion policy with model-based manipulation for legged mobile manipulators.IEEE Robotics and Automation Letters, 7(2):2377–2384, 2022
2022
-
[24]
Shared object manipulation with a team of collaborative quadrupeds.arXiv:2510.00682, 2025
Shengzhi Wang et al. Shared object manipulation with a team of collaborative quadrupeds.arXiv:2510.00682, 2025
-
[25]
Learning to open and traverse doors with a legged manipulator.arXiv:2409.04882, 2024
Mike Zhang et al. Learning to open and traverse doors with a legged manipulator.arXiv:2409.04882, 2024
-
[26]
A theoretical justification for asymmetric actor-critic algorithms
Gaspard Lambrechts et al. A theoretical justification for asymmetric actor-critic algorithms. InInternational Conference on Machine Learning, pages 32375–32405. PMLR, 2025
2025
-
[27]
Proximal Policy Optimization Algorithms
John Schulman et al. Proximal policy optimization algorithms. arXiv:1707.06347, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[28]
Modeling the control of isometric force production with piece-wise linear, stochastic maps of multiple time- scales.Fluctuation and Noise Letters, 3(01):L23–L29, 2003
Gottfried Mayer-Kress et al. Modeling the control of isometric force production with piece-wise linear, stochastic maps of multiple time- scales.Fluctuation and Noise Letters, 3(01):L23–L29, 2003
2003
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.