Efficient closed-form approaches for pose estimation using Sylvester forms
Pith reviewed 2026-05-10 11:23 UTC · model grok-4.3
The pith
New Sylvester form solvers solve pose estimation faster while matching prior closed-form accuracy.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
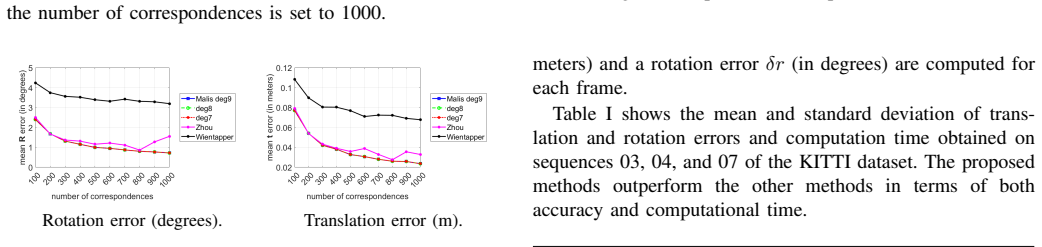
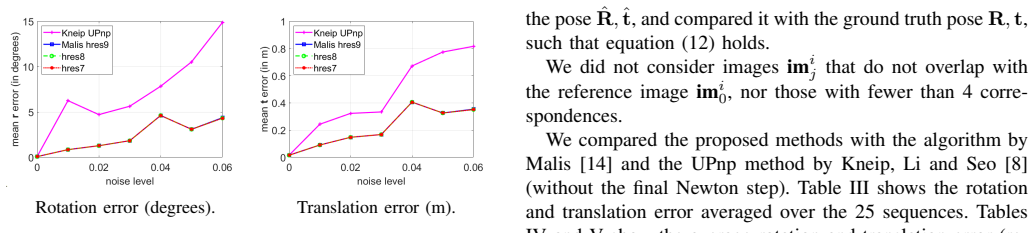
We propose a new class of resultant-based solvers that exploit Sylvester forms to further reduce the complexity of the resolution. These solvers are numerically as accurate as the state-of-the-art while outperforming them in computational time. The approach applies to pose estimation from 3D-3D correspondences and from 3D points to 2D points correspondences.
What carries the argument
Sylvester forms, matrix representations of polynomial resultants that produce smaller linear systems whose solutions yield the rotation and translation parameters.
If this is right
- The solvers can be swapped into existing real-time pipelines for lower latency at the same precision.
- Both 3D-3D and 3D-2D pose problems benefit from the same complexity reduction.
- Resultant matrices built from Sylvester forms become a practical tool for other algebraic vision tasks.
Where Pith is reading between the lines
- Mobile or embedded vision systems could run more frequent pose updates without extra hardware.
- The same matrix-construction idea may shorten solvers for related polynomial problems such as essential-matrix estimation.
- Combining the closed-form step with a single refinement iteration could further improve robustness to noise.
Load-bearing premise
An adequate rotation parametrization turns the pose least-squares problem into a system of polynomial equations that can be solved in closed form.
What would settle it
On standard benchmark sets, the new solvers produce either larger average rotation or translation error or longer runtimes than the fastest existing closed-form pose solvers.
Figures


read the original abstract
Solving non-linear least-squares problem for pose estimation (rotation and translation) is often a time consuming yet fundamental problem in several real-time computer vision applications. With an adequate rotation parametrization, the optimization problem can be reduced to the solution of a~system of polynomial equations and solved in closed form. Recent advances in efficient closed form solvers utilizing resultant matrices have shown a promising research direction to decrease the computation time while preserving the estimation accuracy. In this paper, we propose a new class of resultant-based solvers that exploit Sylvester forms to further reduce the complexity of the resolution. We demonstrate that our proposed methods are numerically as accurate as the state-of-the-art solvers, and outperform them in terms of computational time. We show that this approach can be applied for pose estimation in two different types of problems: estimating a pose from 3D to 3D correspondences, and estimating a pose from 3D points to 2D points correspondences.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a new class of resultant-based closed-form solvers for pose estimation that exploit Sylvester forms to construct more compact resultant matrices after parametrizing the rotation. The approach is applied to both 3D-3D and 3D-2D correspondence problems, with the central claim that the resulting solvers achieve numerical accuracy comparable to existing state-of-the-art methods while reducing computational time.
Significance. If the reported runtime gains are reproducible and the accuracy parity holds across diverse conditions, the work could provide practical value for real-time computer vision pipelines that repeatedly solve pose estimation. The technical contribution lies in adapting Sylvester forms to shrink the algebraic complexity of prior resultant techniques without introducing additional parameters or approximations.
minor comments (3)
- Abstract: the claim of outperforming prior solvers 'in terms of computational time' would be strengthened by stating the observed speedup factor (e.g., 1.5× or 2×) rather than leaving it qualitative.
- Section 5 (Experiments): runtime tables should explicitly list the hardware platform, compiler flags, and whether timings include matrix construction or only the solver step, to allow direct comparison with prior work.
- Notation: the rotation parametrization (introduced early) is referenced repeatedly; a single consolidated table listing the polynomial degrees and resultant matrix sizes before/after the Sylvester reduction would improve readability.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our manuscript and the recommendation for minor revision. The summary accurately reflects our central contribution: the use of Sylvester forms to obtain more compact resultant matrices for closed-form pose estimation after rotation parametrization, with demonstrated runtime improvements on both 3D-3D and 3D-2D problems while preserving numerical accuracy.
Circularity Check
No significant circularity in derivation chain
full rationale
The paper reduces pose estimation to a polynomial system via standard rotation parametrization, then constructs resultant matrices using Sylvester forms to obtain closed-form solutions. These steps rely on established algebraic techniques for polynomial solving rather than any self-referential definitions, fitted parameters renamed as predictions, or load-bearing self-citations. Experimental validation of accuracy and runtime uses independent benchmarks, confirming the core claims remain independent of the paper's own outputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Adequate rotation parametrization reduces the pose estimation problem to a solvable system of polynomial equations
Reference graph
Works this paper leans on
-
[1]
Complete solution classification for the perspective-three-point problem,
X.-S. Gao, X.-R. Hou, J. Tang, and H.-F. Cheng, “Complete solution classification for the perspective-three-point problem,” IEEE Transac- tions on Pattern Analysis and Machine Intelligence , vol. 25, 2003
work page 2003
-
[2]
L. Kneip, D. Scaramuzza, and R. Siegwart, “A novel parametrization of the perspective-three-point problem for a direct computation of absolute camera position and orientation,” in IEEE International Conference on Computer Vision and Pattern Recognition, Colorado Springs, USA, June 2011
work page 2011
-
[3]
An efficient algebraic solution to the perspective-three-point problem,
T. Ke and S. I. Roumeliotis, “An efficient algebraic solution to the perspective-three-point problem,” in IEEE Conference on Computer Vision and Pattern Recognition (CVPR) , 2017, pp. 4618–4626
work page 2017
-
[4]
Y . Ding, J. Yang, V . Larsson, C. Olsson, and K. ˚Astr¨om, “Revisiting the p3p problem,” in IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023
work page 2023
-
[5]
Epnp: An accurate o(n) solution to the pnp problem,
V . Lepetit, F. Moreno-Noguer, and P. Fua, “Epnp: An accurate o(n) solution to the pnp problem,” Int Journal on Computer Vision , vol. 81, pp. 155–166, 2008
work page 2008
-
[6]
A direct least-squares (dls) method for pnp,
J. A. Hesch and S. I. Roumeliotis, “A direct least-squares (dls) method for pnp,” in Int Conference on Computer Vision , 2011
work page 2011
-
[7]
Revisiting the pnp problem: A fast, general and optimal solution,
Y . Zheng, Y . Kuang, S. Sugimoto, K. ˚Astrom, and M. Okutomi, “Revisiting the pnp problem: A fast, general and optimal solution,” in International Conference on Computer Vision (ICCV) , 2013
work page 2013
-
[8]
Upnp: An optimal o(n) solution to the absolute pose problem with universal applicability,
L. Kneip, H. Li, and Y . Seo, “Upnp: An optimal o(n) solution to the absolute pose problem with universal applicability,” in European Conference on Computer Vision (ECCV) , 2014
work page 2014
-
[9]
Closed-form solution of absolute orientation using unit quaternions,
B. Horn, “Closed-form solution of absolute orientation using unit quaternions,” Journal of the Optical Society of America A , vol. 4, no. 4, 1987. 9 rotation (°) translation (m) time (ms) µ(δr) ± σ(δr) max(δr) µ(δt) ± σ(δt) max(δt) µ(t) ± σ(t) UPnP 0.254 ± 0.630 33.07 0.005 ± 0.007 0.380 0.734 ± 0.332 (in C) optDLS 0.265 ± 1.604 71.61 0.008 ± 0.099 5.029 ...
work page 1987
-
[10]
The registration problem revisited: Optimal solutions from points, lines and planes,
C. Olsson, F. Kahl, and M. Oskarsson, “The registration problem revisited: Optimal solutions from points, lines and planes,” in IEEE Conference on Computer Vision and Pattern Recognition , vol. 1, 2006
work page 2006
-
[11]
A universal, closed-form approach for absolute pose problems,
F. Wientapper, M. Schmitt, M. Fraissinet-Tachet, and A. Kuijper, “A universal, closed-form approach for absolute pose problems,” Computer Vision and Image Understanding , vol. 173, 2018
work page 2018
-
[12]
A fast and accurate solution for pose estimation from 3d correspondences,
L. Zhou, S. Wang, and M. Kaess, “A fast and accurate solution for pose estimation from 3d correspondences,” in IEEE International Conference on Robotics and Automation (ICRA) , 2020
work page 2020
-
[13]
Complete closed-form and accurate solution to pose estima- tion from 3d correspondences,
E. Malis, “Complete closed-form and accurate solution to pose estima- tion from 3d correspondences,” IEEE Robotics and Automation Letters , vol. 8, pp. 1786 – 1793, 2023
work page 2023
-
[14]
A novel closed-form approach for enhancing efficiency in pose estimation from 3d correspondences,
——, “A novel closed-form approach for enhancing efficiency in pose estimation from 3d correspondences,” IEEE Robotics and Automation Letters, vol. 9, pp. 1843–1850, 2024
work page 2024
-
[15]
Formes d’inertie et r ´esultant: un formulaire,
J. P. Jouanolou, “Formes d’inertie et r ´esultant: un formulaire,” Adv. Math., vol. 126, no. 2, pp. 119–250, 1997. [Online]. Available: https://doi.org/10.1006/aima.1996.1609
-
[16]
Multigraded sylvester forms, duality and elimination matrices,
L. Bus ´e, M. Chardin, and N. Nemati, “Multigraded sylvester forms, duality and elimination matrices,” Journal of Algebra, vol. 609, pp. 514– 546, 2022
work page 2022
-
[17]
D. A. Cox, J. B. Little, and D. O’Shea, Using algebraic geometry , 2nd ed., ser. Graduate texts in mathematics. New York: Springer, 2005
work page 2005
-
[18]
D. Eisenbud, The geometry of Syzygies a second course in commutative n Kneip UPnp Malis deg9 deg8 deg7 4 8.2631 6.6374 6.8478 3.7874 5 1.5255 3.5584 3.3815 2.7821 6 11.5245 2.4866 2.4848 2.4597 7 1.4194 2.0547 2.1253 2.0578 8 0.6908 1.4533 1.4531 1.4533 9 5.8250 1.9149 1.9149 1.9149 10 0.6147 0.1549 0.1549 0.1549 11 - 25 12.4584 4.0925 4.0925 4.0925 26 - ...
work page 1951
-
[19]
New York, N.Y ., [etc: Springer, 2005
work page 2005
- [20]
-
[21]
Sturmfels, Algorithms in Invariant Theory
B. Sturmfels, Algorithms in Invariant Theory. Springer-Verlag, Vienna, 1993
work page 1993
-
[22]
Vision meets robotics: The KITTI dataset,
A. Geiger, P. Lenz, C. Stiller, and R. Urtasun, “Vision meets robotics: The KITTI dataset,” International Journal of Robotics Research (IJRR) , 2013
work page 2013
-
[23]
Globally optimal dls method for pnp problem with cayley parameterization,
G. Nakano, “Globally optimal dls method for pnp problem with cayley parameterization,” in British Machine Vision Conference , 2015
work page 2015
-
[24]
A simple, robust and fast method for the perspective-n-point problem,
P. Wang, G. Xu, Y . Cheng, and Q. Yu, “A simple, robust and fast method for the perspective-n-point problem,” Pattern Recognition Letters , vol. 108, pp. 31–37, 2018
work page 2018
-
[25]
Revisiting the pnp problem: A fast, general and optimal solution,
Y . Zheng, Y . Kuang, S. Sugimoto, K. ˚Astr¨om, and M. Okutomi, “Revisiting the pnp problem: A fast, general and optimal solution,” in 2013 IEEE International Conference on Computer Vision , 2013, pp. 2344–2351
work page 2013
-
[26]
A consistently fast and globally optimal solution to the perspective-n-point problem,
G. Terzakis and M. Lourakis, “A consistently fast and globally optimal solution to the perspective-n-point problem,” in Computer Vision – ECCV 2020: 16th European Conference, Glasgow, UK, August 23–28, 2020, Proceedings, Part I . Springer-Verlag, 2020, p. 478–494
work page 2020
-
[27]
A multi-view stereo benchmark with high- resolution images and multi-camera videos,
T. Sch ¨ops, J. L. Sch ¨onberger, S. Galliani, T. Sattler, K. Schindler, M. Pollefeys, and A. Geiger, “A multi-view stereo benchmark with high- resolution images and multi-camera videos,” in Conference on Computer Vision and Pattern Recognition (CVPR) , 2017
work page 2017
-
[28]
Opengv: A unified and generalized approach to real-time calibrated geometric vision,
L. Kneip and P. Furgale, “Opengv: A unified and generalized approach to real-time calibrated geometric vision,” in 2014 IEEE International Conference on Robotics and Automation (ICRA) , 2014, pp. 1–8. 10
work page 2014
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.