Projected Dynamic Programming for Sequential Quantum State Discrimination
Pith reviewed 2026-05-10 11:22 UTC · model grok-4.3
The pith
Sequential quantum state discrimination is cast as a POMDP that includes minimum-error discrimination as its one-step case.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We formally cast SQSD into a static-hidden-state Partially Observable Markov Decision Process (POMDP) framework. We demonstrate that this formulation precisely subsumes the conventional minimum-error discrimination (MED) scheme as a special one-step case. Furthermore, we apply a regular grid-based discretization to the continuous belief simplex and approximate the possibly continuous measurement space using a finite library. Then we provide rigorous mathematical bounds on the resulting errors and analyze the computational complexity for both offline planning and online execution. Our analysis confirms that the inherent trade-off between accuracy and complexity, as well as the curse of diment
What carries the argument
The static-hidden-state POMDP formulation with regular grid discretization of the belief simplex and finite-library approximation of the measurement space, which enables dynamic programming to compute sequential policies while supplying error bounds.
Load-bearing premise
The error introduced by discretizing the belief simplex and the measurement space remains bounded for the quantum states and hypothesis counts under consideration.
What would settle it
Direct computation of the optimal sequential discrimination policy for binary states showing that the discretized POMDP value differs from the true optimum by more than the derived bound for a chosen grid size.
Figures














read the original abstract
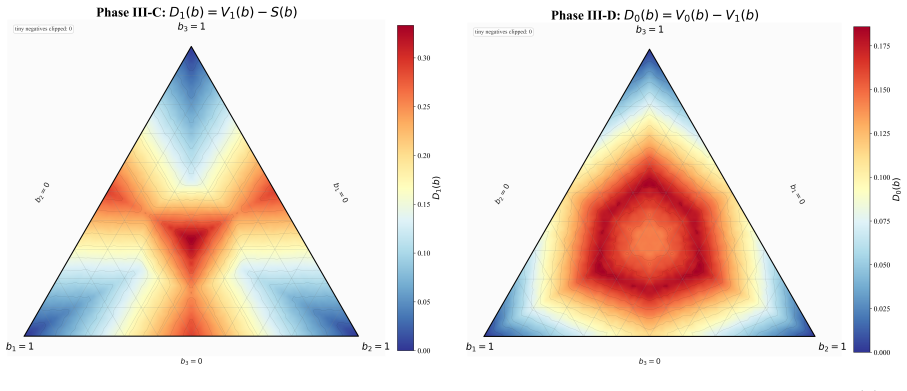
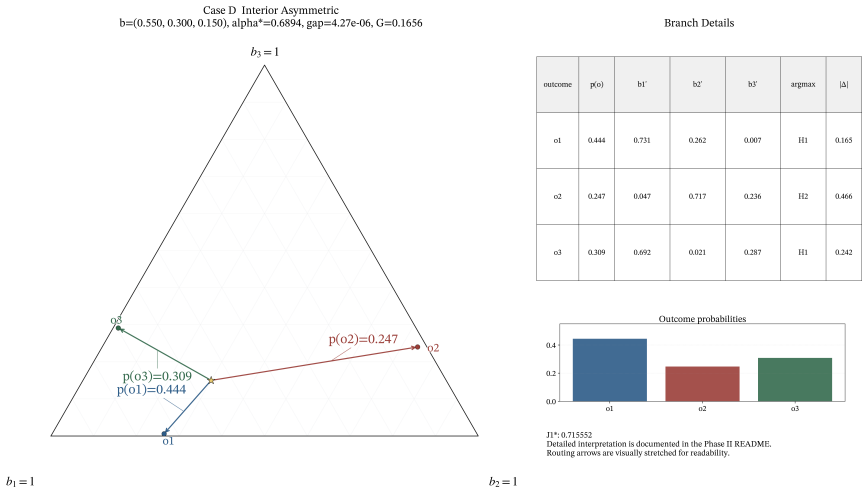
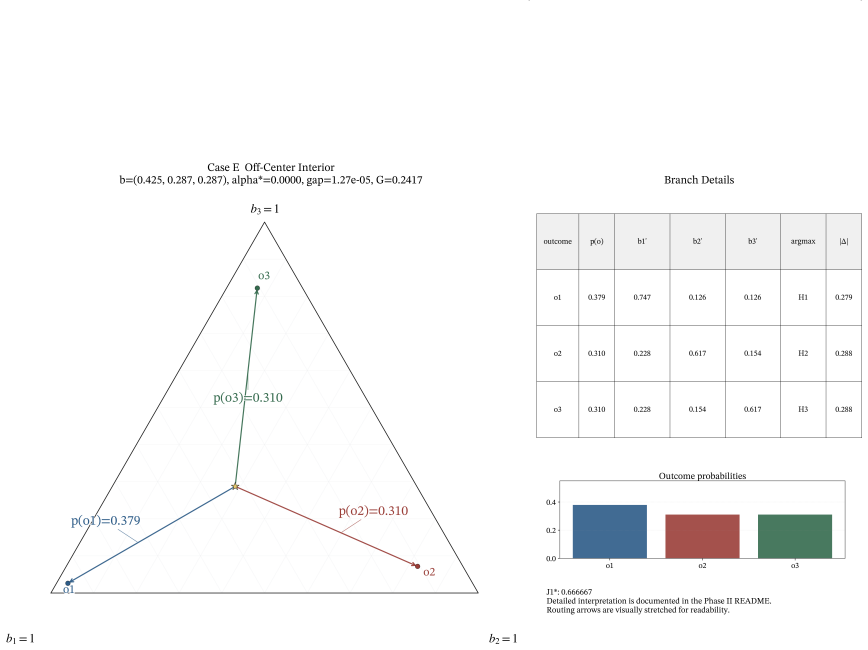
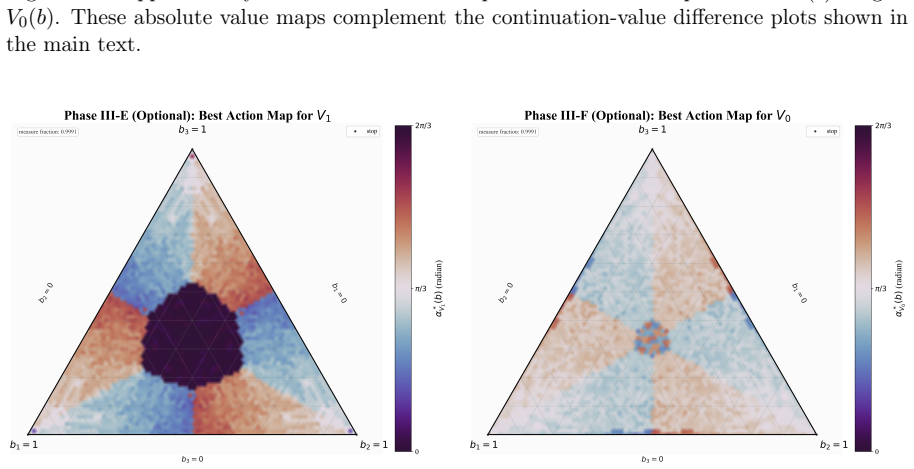
Sequential Quantum State Discrimination (SQSD) can be naturally framed as a sequential decision-making problem: at each time step, an agent must decide whether to perform an additional measurement to gather more information or to conclude with an optimal decision based on the current belief. In this paper, we formally cast SQSD into a static-hidden-state Partially Observable Markov Decision Process (POMDP) framework. We demonstrate that this formulation precisely subsumes the conventional minimum-error discrimination (MED) scheme as a special one-step case. Furthermore, we apply a regular grid-based discretization to the continuous belief simplex and approximate the possibly continuous measurement space using a finite library. Then we provide rigorous mathematical bounds on the resulting errors and analyze the computational complexity for both offline planning and online execution. Our analysis confirms that the inherent trade-off between accuracy and complexity, as well as the curse of dimensionality regarding the number of hypotheses, are also prominently observed in the quantum regime. Finally, we provide a working example of binary state discrimination to derive explicit forms of various functions and present numerical simulations for trine state discrimination to visualize the sequential structure of our POMDP-based SQSD.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper casts Sequential Quantum State Discrimination (SQSD) as a static-hidden-state POMDP, shows that this exactly subsumes minimum-error discrimination (MED) as the one-step case, applies regular-grid discretization to the belief simplex together with a finite measurement library, derives rigorous error bounds, analyzes offline/online complexity, and illustrates the approach with an explicit binary-state example plus trine-state numerical simulations.
Significance. The exact POMDP reduction to MED and the explicit complexity analysis are useful contributions that could support adaptive quantum measurement protocols. If the claimed rigorous bounds on discretization error are fully substantiated, the work supplies a concrete, implementable framework for trading accuracy against computational cost in the quantum setting.
major comments (1)
- [Discretization and error-bound section] The abstract states that regular-grid discretization of the belief simplex and finite approximation of the measurement space 'provide rigorous mathematical bounds on the resulting errors.' No explicit Lipschitz constant, modulus of continuity, or convexity argument for the quantum value function is referenced; without such regularity conditions the uniform-grid error bounds may fail to be rigorous for high-dimensional simplices or sharply peaked Born-rule likelihoods (as the skeptic note correctly flags). This is load-bearing for the approximation claims.
minor comments (2)
- [Numerical simulations] The trine-state simulation figures would benefit from an explicit statement of the grid resolution employed and the resulting observed error relative to the derived bound.
- [Notation and definitions] Notation for the belief simplex and the finite measurement library should be introduced once with a clear table or equation reference rather than scattered across the text.
Simulated Author's Rebuttal
We thank the referee for their careful reading and constructive feedback. We address the major comment point by point below.
read point-by-point responses
-
Referee: [Discretization and error-bound section] The abstract states that regular-grid discretization of the belief simplex and finite approximation of the measurement space 'provide rigorous mathematical bounds on the resulting errors.' No explicit Lipschitz constant, modulus of continuity, or convexity argument for the quantum value function is referenced; without such regularity conditions the uniform-grid error bounds may fail to be rigorous for high-dimensional simplices or sharply peaked Born-rule likelihoods (as the skeptic note correctly flags). This is load-bearing for the approximation claims.
Authors: We appreciate the referee's observation that the rigor of the discretization error bounds is central to our claims. In Section 4 we derive the approximation error by bounding the difference between the continuous and discretized value functions using the fact that the finite-horizon POMDP value function is Lipschitz continuous in the belief state (under total variation) with a modulus that depends on the horizon, the number of hypotheses, and the operator norm of the measurement operators. However, we did not explicitly extract or display this Lipschitz constant nor spell out the convexity argument for the quantum value function in the main text. We will revise the manuscript to include an explicit derivation of the constant (showing it is finite and independent of the particular belief trajectory) together with the modulus-of-continuity estimate that justifies the uniform-grid bound even when Born-rule likelihoods are peaked. The revised version will also clarify that the bound remains uniform over the compact simplex for any fixed finite measurement library. These additions will be placed in the discretization section and referenced from the abstract. revision: yes
Circularity Check
No significant circularity in POMDP casting or discretization bounds
full rationale
The paper applies the standard static-hidden-state POMDP formalism to SQSD by identifying the fixed hypothesis as the hidden state and Born-rule probabilities as observations; the one-step reduction to MED follows directly from the Bellman backup with horizon length 1, which is an intended verification rather than a derived prediction. Error bounds are obtained from standard analysis of regular-grid approximation error on the belief simplex and finite measurement library truncation, using general properties of value functions and discretization without any fitted parameters renamed as predictions or load-bearing self-citations. The derivation remains self-contained and draws on external POMDP theory and quantum measurement without reducing central claims to tautological inputs.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The belief simplex in SQSD can be approximated by a regular grid discretization while preserving the ability to derive rigorous error bounds.
- domain assumption The continuous space of possible quantum measurements can be approximated by a finite library without invalidating the optimality analysis.
Reference graph
Works this paper leans on
-
[1]
Quantum state discrimination and its applications
Joonwoo Bae and Leong-Chuan Kwek. Quantum state discrimination and its applications. Journal of Physics A: Mathematical and Theoretical, 48(8):083001, January 2015. 48
work page 2015
-
[2]
Stubbs, Narayanan Rengaswamy, and Henry D
Sarah Brandsen, Mengke Lian, Kevin D. Stubbs, Narayanan Rengaswamy, and Henry D. Pfister. Adaptive procedures for discriminating between arbitrary tensor-product quantum states. In2020 IEEE International Symposium on Information Theory (ISIT), pages 1933– 1938, 2020
work page 1933
-
[3]
Milos Hauskrecht. Value-function approximations for partially observable markov decision processes.Journal of Artificial Intelligence Research, 13:33–94, 2000
work page 2000
-
[4]
Helstrom.Quantum Detection and Estimation Theory
Carl W. Helstrom.Quantum Detection and Estimation Theory. Academic Press, New York, 1976
work page 1976
-
[5]
Leslie Pack Kaelbling, Michael L. Littman, and Anthony R. Cassandra. Planning and acting in partially observable stochastic domains.Artificial Intelligence, 101(1–2):99–134, 1998
work page 1998
-
[6]
Hanna Kurniawati. Partially observable markov decision processes and robotics.Annual Review of Control, Robotics, and Autonomous Systems, 5:253–277, 2022
work page 2022
-
[7]
Yonglong Li, Vincent Y. F. Tan, and Marco Tomamichel. Optimal adaptive strategies for sequential quantum hypothesis testing.Communications in Mathematical Physics, 392:993– 1027, 2022
work page 2022
-
[8]
William S. Lovejoy. Computationally feasible bounds for partially observed markov decision processes.Operations Research, 39(1):162–175, 1991
work page 1991
-
[9]
George E. Monahan. State of the art—a survey of partially observable markov decision processes: Theory, models, and algorithms.Management Science, 28(1):1–16, 1982
work page 1982
-
[10]
Joelle Pineau, Geoffrey J. Gordon, and Sebastian Thrun. Anytime point-based approxima- tions for large pomdps.Journal of Artificial Intelligence Research, 27:335–380, 2006
work page 2006
- [11]
-
[12]
Richard D. Smallwood and Edward J. Sondik. The optimal control of partially observable markov processes over a finite horizon.Operations Research, 21(5):1071–1088, 1973
work page 1973
-
[13]
Trey Smith and Reid G. Simmons. Point-based POMDP algorithms: Improved analysis and implementation. InProceedings of the 21st Conference on Uncertainty in Artificial Intelligence (UAI), 2005
work page 2005
-
[14]
Matthijs T. J. Spaan and Nikos Vlassis. Perseus: Randomized point-based value iteration for POMDPs.Journal of Artificial Intelligence Research, 24:195–220, 2005
work page 2005
-
[15]
Minimum-consumption discrimination of quantum states via globally optimal adaptive measurements.Phys
Boxuan Tian, Wen-Zhe Yan, Zhibo Hou, Guo-Yong Xiang, Chuan-Feng Li, and Guang- Can Guo. Minimum-consumption discrimination of quantum states via globally optimal adaptive measurements.Phys. Rev. Lett., 132:110801, 2024
work page 2024
-
[16]
H. Yuen, R. Kennedy, and M. Lax. Optimum testing of multiple hypotheses in quantum detection theory.IEEE Transactions on Information Theory, 21(2):125–134, 1975. A Supplementary Figures for the Trine Example This appendix collects supplementary figures for the trine-state numerical example of Section 8. We separate the materials into posterior-routing fig...
work page 1975
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.