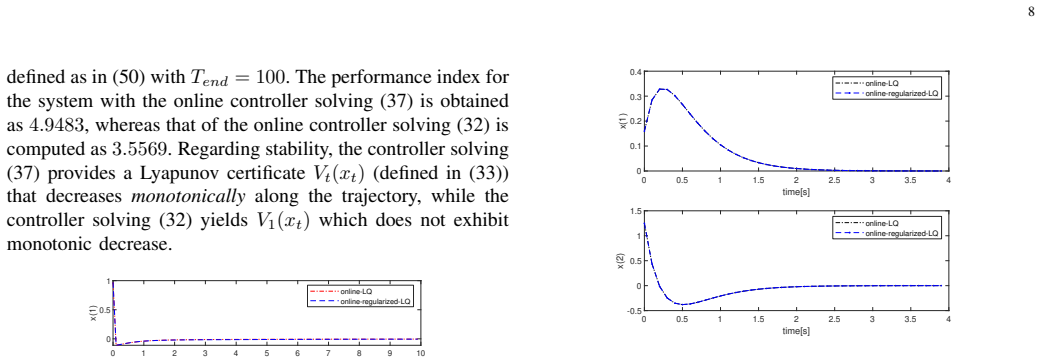
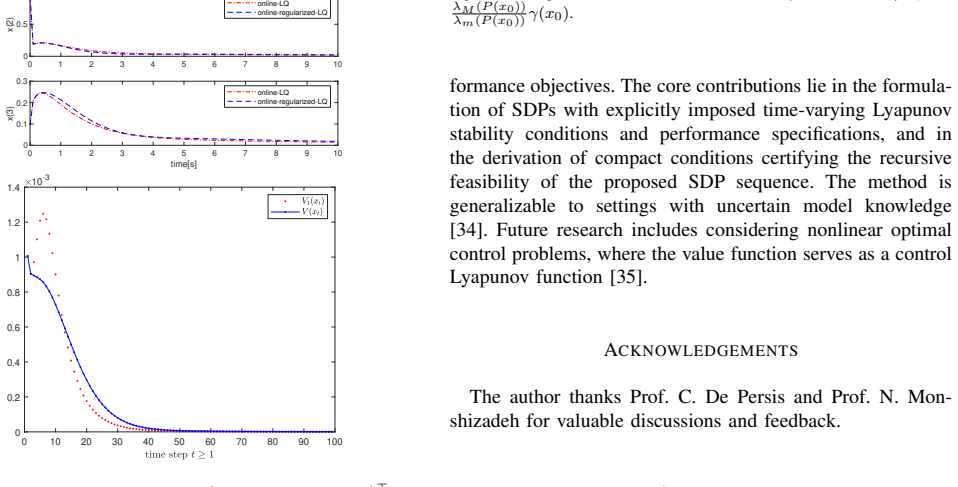
Semi-definite programs for online control of nonlinear systems with stability guarantees
Pith reviewed 2026-05-10 06:48 UTC · model grok-4.3
The pith
Time-varying semidefinite programs can be solved sequentially to generate stabilizing feedback controllers and Lyapunov certificates for nonlinear systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
For nonlinear systems that admit a state-dependent representation, sequences of time-varying semidefinite programs can be solved online such that their optimal solutions jointly yield a stabilizing feedback controller and a Lyapunov certificate that satisfy stability conditions and quadratic performance specifications, with compact conditions that certify recursive feasibility of the SDP sequence and estimates of the region of attraction.
What carries the argument
Sequences of time-varying semidefinite programs formulated from a state-dependent representation of the nonlinear system, whose optimal solutions provide the controller gains and the Lyapunov matrix.
If this is right
- The resulting feedback controller stabilizes the closed-loop nonlinear system.
- Recursive feasibility of the SDP sequence is guaranteed by the derived compact conditions.
- Quadratic performance specifications are satisfied in addition to stability.
- Estimates of the region of attraction are obtained from the Lyapunov certificate.
Where Pith is reading between the lines
- If the state-dependent representation can be obtained from data or identification, the method could apply to black-box nonlinear systems.
- The framework might combine with receding-horizon methods to handle input constraints more explicitly.
- Region of attraction estimates could guide initial condition selection or controller switching in practice.
Load-bearing premise
A state-dependent representation of the nonlinear dynamics exists such that the time-varying SDPs stay feasible and the extracted controller stabilizes the actual system.
What would settle it
Observing that the closed-loop trajectory diverges or violates the Lyapunov decrease condition despite the SDPs being solved and certified feasible at each step.
Figures
read the original abstract
This paper develops a semidefinite-programming-based method for online feedback control of nonlinear systems using a state-dependent representation. We formulate sequences of time-varying SDPs whose optimal solutions jointly yield a stabilizing feedback controller and a Lyapunov certificate satisfying stability conditions and quadratic performance specifications. We further establish compact conditions certifying recursive feasibility of the resulting SDP sequences and derive estimates of the region of attraction. Numerical examples on representative nonlinear systems illustrate the flexibility and effectiveness of the proposed method.
Editorial analysis
A structured set of objections, weighed in public.
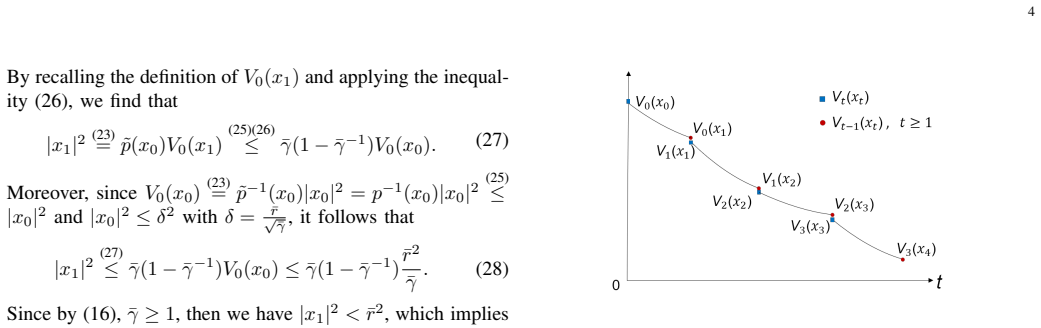
Referee Report
Summary. The manuscript develops an SDP-based online feedback control method for nonlinear systems via a state-dependent representation of the dynamics. Sequences of time-varying SDPs are formulated whose solutions jointly yield a stabilizing state-feedback controller and a Lyapunov certificate satisfying stability and quadratic performance conditions; compact conditions are derived to certify recursive feasibility of the SDP sequence, together with region-of-attraction estimates. Numerical examples on representative nonlinear systems are used to illustrate the approach.
Significance. If the central claims hold, the work would provide a computationally attractive, optimization-based route to online nonlinear control with explicit stability and performance guarantees, extending SDP techniques beyond linear or quasi-LPV settings. The compact recursive-feasibility conditions and region-of-attraction estimates are potentially valuable for real-time implementation. The numerical examples demonstrate flexibility, but the overall significance hinges on whether the state-dependent representation is shown to be exact and the Lyapunov decrease is rigorously transferred to the original vector field.
major comments (2)
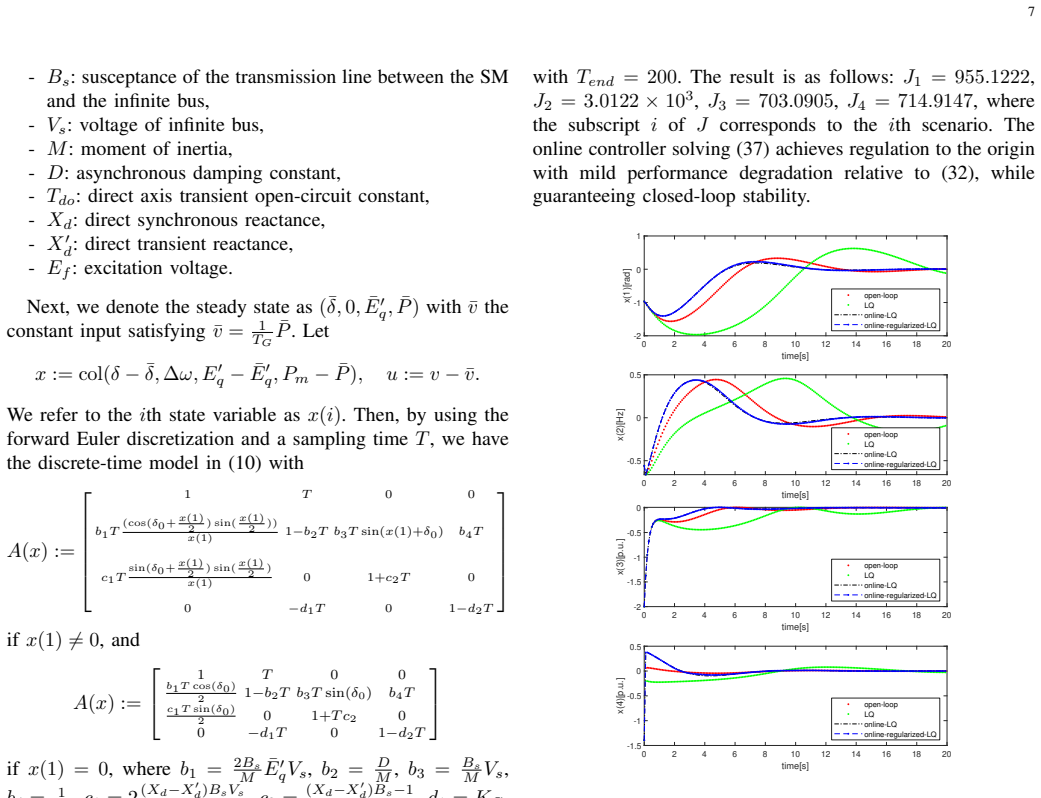
- [§3] §3 (State-dependent representation and SDP formulation): The central stability guarantee rests on the exact equivalence between the original nonlinear dynamics ẋ = f(x,u) and the state-dependent form ẋ = A(x)x + B(x)u. No general algorithm is supplied for constructing A(x) and B(x) from arbitrary f, nor is a proof given that the LMI decrease condition enforced by the SDP implies V̇(x,K(x)x) < 0 along the true f. This equivalence is load-bearing for the claim that SDP solutions certify closed-loop stability.
- [§4] §4 (Recursive feasibility and region of attraction): The compact conditions certifying recursive feasibility of the time-varying SDP sequence are derived under the maintained validity of the state-dependent representation along the closed-loop trajectory. No invariant set or explicit bound is provided to guarantee that future states remain inside the domain where the representation holds exactly, which directly affects whether the recursive-feasibility claim transfers to the original nonlinear system.
minor comments (2)
- [§2] Notation for the online versus sequence SDP should be introduced more explicitly in the problem statement to avoid ambiguity when referring to the time-varying formulation.
- [§5] The numerical examples would be strengthened by overlaying the estimated region of attraction on the state trajectories or phase portraits.
Simulated Author's Rebuttal
We thank the referee for the thorough review and valuable feedback on our manuscript. We address each major comment below, providing clarifications and indicating where revisions will be made to strengthen the presentation.
read point-by-point responses
-
Referee: [§3] §3 (State-dependent representation and SDP formulation): The central stability guarantee rests on the exact equivalence between the original nonlinear dynamics ẋ = f(x,u) and the state-dependent form ẋ = A(x)x + B(x)u. No general algorithm is supplied for constructing A(x) and B(x) from arbitrary f, nor is a proof given that the LMI decrease condition enforced by the SDP implies V̇(x,K(x)x) < 0 along the true f. This equivalence is load-bearing for the claim that SDP solutions certify closed-loop stability.
Authors: The state-dependent representation is exact by construction: for the systems under consideration, A(x) and B(x) are chosen such that A(x)x + B(x)u ≡ f(x,u) holds identically in the relevant domain. This is standard in the literature for input-affine nonlinear systems, where A(x) can be obtained by factoring the state-dependent terms (e.g., for polynomial f via algebraic methods). Since the vector fields are identical, the time derivative of the Lyapunov function V along the closed-loop trajectory is the same whether computed with f or with the state-dependent form. The SDP enforces the LMI condition on the state-dependent representation, which therefore guarantees V̇ < 0 for the original dynamics. We acknowledge that a universal algorithmic procedure for arbitrary f is not provided, as the focus is on the control synthesis assuming the representation is available; we will revise §3 to include an explicit statement on the equivalence and a brief note on construction for common classes of systems. revision: partial
-
Referee: [§4] §4 (Recursive feasibility and region of attraction): The compact conditions certifying recursive feasibility of the time-varying SDP sequence are derived under the maintained validity of the state-dependent representation along the closed-loop trajectory. No invariant set or explicit bound is provided to guarantee that future states remain inside the domain where the representation holds exactly, which directly affects whether the recursive-feasibility claim transfers to the original nonlinear system.
Authors: The recursive feasibility conditions and the region-of-attraction (RoA) estimate are indeed predicated on the state-dependent representation remaining valid. The RoA estimate is derived as a sublevel set of the Lyapunov function within the domain of validity of the representation. To ensure the claim transfers rigorously, the estimated RoA can be taken as the intersection with the validity domain, which is invariant under the closed-loop dynamics by construction of the Lyapunov decrease. We will add a paragraph in §4 clarifying this intersection and confirming that the recursive feasibility holds within this invariant set for the original system. revision: yes
Circularity Check
No circularity: forward SDP construction from given state-dependent representation
full rationale
The paper presents a constructive method that takes an assumed exact state-dependent representation of the nonlinear dynamics as input and builds time-varying SDPs whose LMI constraints are derived from standard Lyapunov decrease conditions and quadratic performance criteria. Recursive feasibility conditions and region-of-attraction estimates are then proved directly from the SDP solutions under that representation. No step reduces a claimed prediction or certificate to a fitted parameter or self-referential definition; the stability guarantee is conditional on the representation being exact and the SDPs remaining feasible, which is stated as an assumption rather than derived tautologically. No self-citation chains, ansatz smuggling, or renaming of known results appear as load-bearing elements in the derivation.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Numerical methods forH 2 related problems,
E. Feron, V . Balakrishnan, S. Boyd, and L. El Ghaoui, “Numerical methods forH 2 related problems,” in1992 American Control Conference, 1992, pp. 2921–2922
work page 1992
-
[2]
Tutorial overview of model predictive control,
J. Rawlings, “Tutorial overview of model predictive control,”IEEE control systems magazine, vol. 20, no. 3, pp. 38–52, 2002
work page 2002
-
[3]
Linear model predictive safety certification for learning-based control,
K. P. Wabersich and M. N. Zeilinger, “Linear model predictive safety certification for learning-based control,” in2018 IEEE Conference on Decision and Control (CDC). IEEE, 2018, pp. 7130–7135
work page 2018
-
[4]
Sparsity-promoting optimal wide-area control of power networks,
F. D ¨orfler, M. R. Jovanovi ´c, M. Chertkov, and F. Bullo, “Sparsity-promoting optimal wide-area control of power networks,”IEEE Transactions on Power Systems, vol. 29, no. 5, pp. 2281–2291, 2014
work page 2014
-
[5]
Formulas for data-driven control: Stabilization, optimality, and robustness,
C. De Persis and P. Tesi, “Formulas for data-driven control: Stabilization, optimality, and robustness,”IEEE Transactions on Automatic Control, vol. 65, no. 3, pp. 909–924, 2020
work page 2020
-
[6]
Multiobjective output-feedback control via LMI optimization,
C. Scherer, G. Pascal, and C. Mahmoud, “Multiobjective output-feedback control via LMI optimization,”IEEE Transactions on Automatic Control, vol. 42, no. 7, pp. 896–911, 2002
work page 2002
-
[7]
Nonlinear control synthesis by sum of squares optimization: A Lyapunov-based approach,
S. Prajna, A. Papachristodoulou, and F. Wu, “Nonlinear control synthesis by sum of squares optimization: A Lyapunov-based approach,” in2004 5th Asian control conference (IEEE Cat. No. 04EX904), vol. 1. IEEE, 2004, pp. 157–165
work page 2004
-
[8]
Control of systems in- tegrating logic, dynamics, and constraints,
A. Bemporad and M. Morari, “Control of systems in- tegrating logic, dynamics, and constraints,”Automatica, vol. 35, no. 3, pp. 407–427, 1999
work page 1999
-
[9]
S. Boyd, L. El Ghaoui, E. Feron, and V . Balakrishnan, Linear matrix inequalities in system and control theory. SIAM, 1994
work page 1994
-
[10]
Linear matrix inequalities in control,
C. Scherer and S. Weiland, “Linear matrix inequalities in control,”Lecture Notes, Dutch Institute for Systems and Control, Delft, The Netherlands, 2021
work page 2021
-
[11]
H ∞ control of nonlinear systems: a convex characterization,
W.-M. Lu and J. C. Doyle, “H ∞ control of nonlinear systems: a convex characterization,”IEEE Transactions on Automatic Control, vol. 40, no. 9, pp. 1668–1675, 1995
work page 1995
-
[12]
Approximation methods in optimal control i. sub-optimal control,
J. Pearson, “Approximation methods in optimal control i. sub-optimal control,”International Journal of Electron- ics, vol. 13, no. 5, pp. 453–469, 1962
work page 1962
-
[13]
State-dependent Riccati equation regulation of systems with state and control nonlinearities,
S. C. Beeler and D. E. Cox, “State-dependent Riccati equation regulation of systems with state and control nonlinearities,” Tech. Rep., 2004
work page 2004
-
[14]
J. R. Cloutier, C. N. D’Souza, and C. P. Mracek, “Non- linear regulation and nonlinearH ∞ control via the state- dependent Riccati equation technique: Part 1, theory,” in Proceedings of the international conference on nonlinear problems in aviation and aerospace. Embry Riddle University Press, Daytona Beach, Florida, 1996, pp. 117– 131
work page 1996
-
[15]
Optimized discrete-time state dependent Riccati equation regulator,
A. S. Dutka, A. W. Ordys, and M. J. Grimble, “Optimized discrete-time state dependent Riccati equation regulator,” inProceedings of the 2005, American Control Confer- ence, 2005.IEEE, 2005, pp. 2293–2298
work page 2005
-
[16]
M. Sassano and A. Astolfi, “Dynamic approximate so- lutions of the HJ inequality and of the HJB equation for input-affine nonlinear systems,”IEEE Transactions on Automatic Control, vol. 57, no. 10, pp. 2490–2503, 2012
work page 2012
-
[17]
Data-driven discovery of Koopman eigenfunctions for control,
E. Kaiser, J. N. Kutz, and S. L. Brunton, “Data-driven discovery of Koopman eigenfunctions for control,”Ma- 11 chine Learning: Science and Technology, vol. 2, no. 3, p. 035023, 2021
work page 2021
-
[18]
Linear-like policy iteration based optimal control for continuous-time nonlinear sys- tems,
A. Tahirovic and A. Astolfi, “Linear-like policy iteration based optimal control for continuous-time nonlinear sys- tems,”IEEE Transactions on Automatic Control, 2022
work page 2022
-
[19]
Nonlinear data-driven control via state-dependent representations,
T. Dai and M. Sznaier, “Nonlinear data-driven control via state-dependent representations,” in2021 60th IEEE Conference on Decision and Control (CDC). IEEE, 2021, pp. 5765–5770
work page 2021
-
[20]
State-dependent Riccati equation (SDRE) control: a survey,
T. C ¸ imen, “State-dependent Riccati equation (SDRE) control: a survey,”IFAC Proceedings Volumes, vol. 41, no. 2, pp. 3761–3775, 2008
work page 2008
-
[21]
T. Chen and B. A. Francis,Optimal sampled-data control systems. Springer, 1995
work page 1995
-
[22]
W. J. Rugh,Linear system theory. Prentice-Hall, Inc., 1996
work page 1996
-
[23]
W. M. Haddad and V . Chellaboina,Nonlinear dynamical systems and control. Princeton university press, 2011
work page 2011
-
[24]
Low-complexity learning of linear quadratic regulators from noisy data,
C. De Persis and P. Tesi, “Low-complexity learning of linear quadratic regulators from noisy data,”Automatica, vol. 128, p. 109548, 2021
work page 2021
-
[25]
On the recoverability of nonlinear state feedback laws by extended linearization control techniques,
J. R. Cloutier, D. T. Stansbery, and M. Sznaier, “On the recoverability of nonlinear state feedback laws by extended linearization control techniques,” inProceed- ings of the 1999 American Control Conference (Cat. No. 99CH36251), vol. 3. IEEE, 1999, pp. 1515–1519
work page 1999
-
[26]
Data-driven control via Petersen’s lemma,
A. Bisoffi, C. De Persis, and P. Tesi, “Data-driven control via Petersen’s lemma,”Automatica, vol. 145, p. 110537, 2022
work page 2022
-
[27]
Kundur,Power System Stability and Control
P. Kundur,Power System Stability and Control. McGraw-Hill, USA, 1994, vol. 7
work page 1994
-
[28]
Conditions for almost global attractivity of a syn- chronous generator connected to an infinite bus,
N. Barabanov, J. Schiffer, R. Ortega, and D. Efimov, “Conditions for almost global attractivity of a syn- chronous generator connected to an infinite bus,”IEEE Transactions on Automatic Control, vol. 62, no. 10, pp. 4905–4916, 2017
work page 2017
-
[29]
C. M. Verrelli, R. Marino, P. Tomei, and G. Damm, “Nonlinear robust coordinated PSS-A VR control for a synchronous generator connected to an infinite bus,” IEEE Transactions on Automatic Control, vol. 67, no. 3, pp. 1414–1422, 2021
work page 2021
-
[30]
Robust adaptive dynamic programming and feedback stabilization of nonlinear systems,
Y . Jiang and Z.-P. Jiang, “Robust adaptive dynamic programming and feedback stabilization of nonlinear systems,”IEEE Transactions on Neural Networks and Learning Systems, vol. 25, no. 5, pp. 882–893, 2014
work page 2014
-
[31]
An energy-based analysis of reduced-order models of (networked) synchronous machines,
T. Stegink, C. De Persis, and A. Van Der Schaft, “An energy-based analysis of reduced-order models of (networked) synchronous machines,”Mathematical and Computer Modelling of Dynamical Systems, vol. 25, no. 1, pp. 1–39, 2019
work page 2019
-
[32]
Mosek optimization toolbox for MATLAB,
M. ApS, “Mosek optimization toolbox for MATLAB,” User’s Guide and Reference Manual, Version, vol. 4, p. 1, 2019
work page 2019
- [33]
-
[34]
Online adap- tation of data-driven controllers for unknown nonlinear systems,
X. Dai, C. De Persis, and N. Monshizadeh, “Online adap- tation of data-driven controllers for unknown nonlinear systems,”International Journal of Robust and Nonlinear Control, 2025
work page 2025
-
[35]
Optimal nonlinear controllers for feedback linearizable systems,
R. A. Freeman and P. V . Kokotovic, “Optimal nonlinear controllers for feedback linearizable systems,” inPro- ceedings of 1995 American Control Conference-ACC’95, vol. 4. IEEE, 1995, pp. 2722–2726
work page 1995
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.