Modeling, Control and Self-sensing of Dielectric Elastomer Soft Actuators: A Review
Pith reviewed 2026-05-10 06:37 UTC · model grok-4.3
The pith
Review shows how to model, control, and self-sense dielectric elastomer actuators to overcome their nonlinear challenges.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
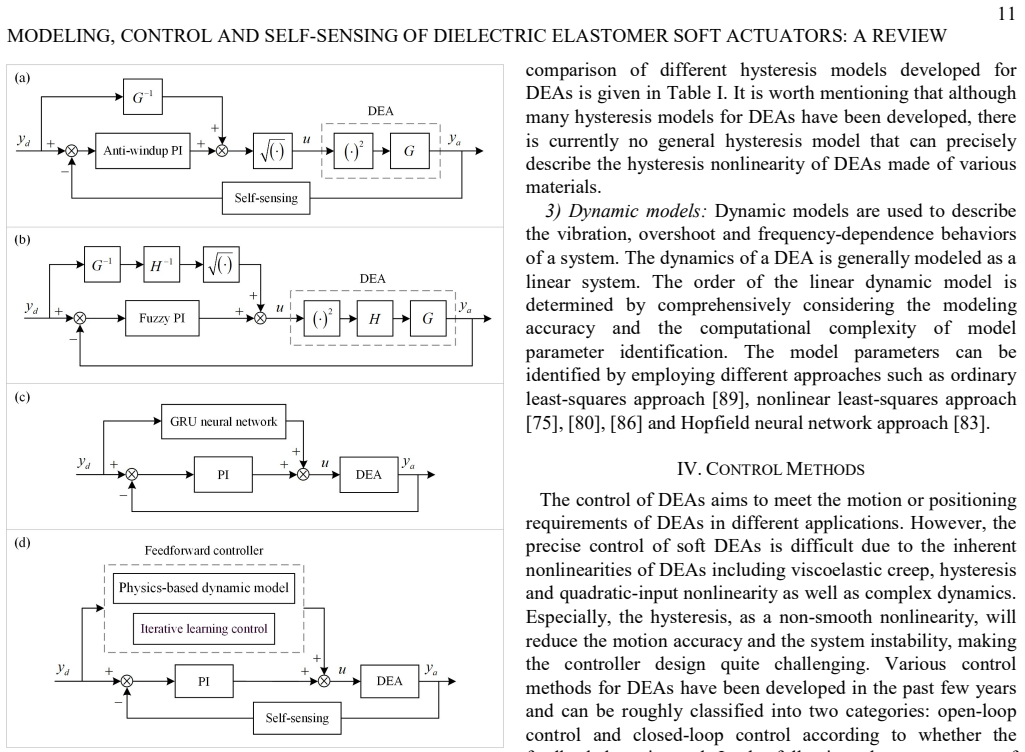
The authors review that physics-based and phenomenological modeling methods can predict DEA electromechanical responses, control methods fall into open-loop feedforward, feedback, feedforward-feedback, and adaptive feedforward categories, and self-sensing can be achieved through physics-based or data-driven approaches without additional sensors, with existing problems and opportunities summarized at the end.
What carries the argument
The classification system that divides modeling into physics-based versus phenomenological approaches, control into four explicit strategy types, and self-sensing into physics-based versus data-driven categories.
If this is right
- The reviewed modeling methods enable prediction of DEA deformation under electric fields while accounting for viscoelastic effects.
- Control methods from the four categories can be selected to mitigate hysteresis and vibrational dynamics during operation.
- Self-sensing techniques allow displacement reconstruction from electrical signals or learned patterns alone.
- Addressing the summarized problems points toward more reliable DEA use in soft robotic applications.
Where Pith is reading between the lines
- Combining adaptive control with data-driven self-sensing could improve robustness in changing environments beyond the cases explicitly covered.
- The same classification approach might apply to other soft actuators sharing similar nonlinear properties.
- Experimental tests of the reviewed methods in integrated robotic systems would be a direct extension.
Load-bearing premise
The assumption that the selected studies comprehensively represent the state of the art on nonlinear elasticity, viscoelastic creep, hysteresis, and vibrational dynamics without selection bias or omission of key limitations.
What would settle it
Discovery of a significant modeling, control, or self-sensing technique for DEAs that is absent from the review, or an experiment demonstrating that a reviewed method fails to account for the listed nonlinear behaviors, would challenge the review's completeness.
Figures

















read the original abstract
Dielectric elastomer actuators (DEAs) have garnered extensive attention especially in soft robotic applications over the past few decades owing to the advantages of lightweight, large strain, fast response and high energy density. However, because the DEAs suffer from nonlinear elasticity, inherent viscoelastic creep, hysteresis and vibrational dynamics, the modeling, control and self-sensing of DEAs are challenging, thereby hindering the practical applications of DEAs. In order to address these challenges, numerous studies have been conducted. In this review, various physics-based modeling methods and phenomenological modeling methods for predicting the electromechanical response of DEAs are presented and discussed. Different control methods for DEAs are reviewed, which are classified into open-loop feedforward control, feedback control, feedforward-feedback control and adaptive feedforward control. Physics-based self-sensing methods and data-driven self-sensing methods for reconstructing the DEA displacement without the need for additional sensors are discussed. Finally, the existing problems and new opportunities for the further studies are summarized.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript is a review of dielectric elastomer actuators (DEAs) for soft robotics. It states that nonlinear elasticity, viscoelastic creep, hysteresis, and vibrational dynamics make modeling, control, and self-sensing challenging. The review presents physics-based and phenomenological modeling methods for electromechanical response, classifies control methods into open-loop feedforward, feedback, feedforward-feedback, and adaptive feedforward categories, discusses physics-based and data-driven self-sensing methods for displacement reconstruction without extra sensors, and summarizes existing problems plus future opportunities.
Significance. If the coverage is representative, the review would offer a structured reference for the soft-robotics community by organizing literature around the four stated challenges and by providing explicit credit to DEA advantages (lightweight, large strain, fast response, high energy density). The manuscript follows its announced outline with dedicated sections on modeling, control, and self-sensing, which is a strength for a survey paper.
minor comments (2)
- [Abstract] The abstract and introduction list the four challenges but do not indicate the total number of papers surveyed or the time window of the literature search; adding this information would help readers gauge completeness.
- [Figures and Tables] Figure captions and table headings should be checked for consistency with the text (e.g., whether all cited modeling approaches appear in a summary table).
Simulated Author's Rebuttal
We thank the referee for the positive evaluation of our review on modeling, control, and self-sensing of dielectric elastomer actuators. We appreciate the recognition that the manuscript follows its announced outline and organizes the literature around the key challenges of nonlinear elasticity, viscoelasticity, hysteresis, and dynamics. The recommendation for minor revision is noted, and we will address any editorial or minor clarifications in the revised version.
Circularity Check
No significant circularity: review paper with no internal derivations
full rationale
This is a literature review summarizing physics-based and phenomenological modeling methods, control strategies (open-loop, feedback, etc.), and self-sensing approaches for dielectric elastomer actuators, drawing exclusively from cited prior studies. No new equations, predictions, fitted parameters, or derivations are introduced by the authors themselves. The central claims are descriptive classifications and summaries of existing work, with no load-bearing steps that reduce to self-definition, fitted inputs renamed as predictions, or self-citation chains. All content is externally referenced, making internal circularity impossible by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
High-speed electrically actuated elastomers with strain greater than 100%,
R. Pelrine, R. Kornbluh, Q. Pei, and J. Joseph, “High-speed electrically actuated elastomers with strain greater than 100%,” Science, vol. 287, pp. 836–839, 2000
work page 2000
-
[2]
Semiseparated biphasic bicontinuous dielectric elastomer for high-performance artificial muscle,
X. Shi et al., “Semiseparated biphasic bicontinuous dielectric elastomer for high-performance artificial muscle,” Science, vol. 390 pp. 1044– 1049, 2025
work page 2025
-
[3]
X. Ji et al., “An autonomous untethered fast soft robotic insect driven by low-voltage dielectric elastomer actuators”, Sci. Robot., vol. 4, Art. no. eaaz6451, 2019
work page 2019
-
[4]
Controlled flight of a microrobot powered by soft artificial muscles,
Y. Chen et al., “Controlled flight of a microrobot powered by soft artificial muscles,” Nature, vol. 575, no. 7782, pp. 324–329, 2019
work page 2019
-
[5]
Self-powered soft robot in the Mariana Trench,
G. Li et al., “Self-powered soft robot in the Mariana Trench,” Nature, vol. 591, no. 7848, pp. 66–71, 2021
work page 2021
-
[6]
A pipeline inspection robot for navigating tubular environments in the sub-centimeter scale,
C. Tang et al., “A pipeline inspection robot for navigating tubular environments in the sub-centimeter scale,” Sci. Robot., vol. 7, no. 66, p. eabm8597, Dec. 2022
work page 2022
-
[7]
Design analysis and fabrication of arrayed tactile display based on dielectric elastomer actuator,
H. S. Lee et al., “Design analysis and fabrication of arrayed tactile display based on dielectric elastomer actuator,” Sens. Actuators A: Phys., vol. 205, pp. 191–198, 2014
work page 2014
-
[8]
A wearable soft haptic communicator based on dielectric elastomer actuators,
H. Zhao et al., “A wearable soft haptic communicator based on dielectric elastomer actuators,” Soft Robot., vol. 7, no. 4, pp. 451–461, Jan. 2020
work page 2020
-
[9]
Untethered feel-through haptics using 18-µm thick dielectric elastomer actuators,
X. Ji et al., “Untethered feel-through haptics using 18-µm thick dielectric elastomer actuators,” Adv. Funct. Mater., vol. 31, no. 39, Art. no. 2006639, Sep. 2021
work page 2021
-
[10]
A wearable textile-embedded dielectric elastomer actuator haptic display,
D.-Y. Lee et al., “A wearable textile-embedded dielectric elastomer actuator haptic display,” Soft Robot., vol. 9, no. 6, pp. 1186–1197, Jul. 2022
work page 2022
-
[11]
R. Sarban, R. W. Jones, B. R. Mace, and E. Rustighi, “A tubular dielectric elastomer actuator: Fabrication, characterization and active vibration isolation,” Mech. Syst. Signal Process., vol. 25, no. 8, pp. 2879–2891, 2011
work page 2011
-
[12]
Active vibration isolation with a dielectric elastomer stack actuator,
W. Kaal, T. Bartel, and S. Herold, “Active vibration isolation with a dielectric elastomer stack actuator,” Smart Mater. Struct., vol. 26, no. 5, Art. no. 55016, 2017
work page 2017
-
[13]
Z. Li et al., “Stacked dielectric elastomer actuator (SDEA): casting process, modeling and active vibration isolation,” Smart Mater. Struct., vol. 27, no. 7, Art. no. 75023, 2018
work page 2018
-
[14]
Y. Zhao, Q. Guo, S. Wu, G. Meng, and W. Zhang, “Design and experimental validation of an annular dielectric elastomer actuator for active vibration isolation,” Mech. Syst. Signal Process., vol. 134, Art. no. 106367, 2019
work page 2019
-
[15]
Z. Ren et al., “A high-lift micro-aerial-robot powered by low-voltage and long-endurance dielectric elastomer actuators,” Adv. Mater., vol. 34, no. 7, Art. no. 2106757, Feb. 2022
work page 2022
-
[16]
A processable, high-performance dielectric elastomer and multilayering process,
Y. Shi et al., “A processable, high-performance dielectric elastomer and multilayering process,” Science, vol. 377, no. 6602, pp. 228–232, Jul. 2022
work page 2022
-
[17]
L.-J. Yin et al., “A high-response-frequency bimodal network polyacrylate elastomer with ultrahigh power density under low electric field,” Nat. Commun., vol. 15, no. 1, Art. no. 9819, 2024
work page 2024
-
[18]
J. Peng et al., “Low-voltage and high-output dielectric elastomer actuators for untethered soft machines working at 200 volts,” Sci. Robot., vol. 11, Art. no. eady9635, 2026
work page 2026
-
[19]
A soft jellyfish robot driven by a dielectric elastomer actuator,
H. Godaba, J. Li, Y. Wang, and J. Zhu, “A soft jellyfish robot driven by a dielectric elastomer actuator,” IEEE Robot. Autom. Lett., vol. 1, no. 2, pp. 624–631, 2016
work page 2016
-
[20]
B. Du et al., “High-speed rotary motor for multidomain operations driven by resonant dielectric elastomer actuators,” Adv. Intell. Syst., vol. 5, no. 11, Art. no. 2300243, Nov. 2023
work page 2023
-
[21]
A quad-unit dielectric elastomer actuator for programmable two-dimensional trajectories,
C. Cao, C. Wu, X. Li, L. Wang, and X. Gao, “A quad-unit dielectric elastomer actuator for programmable two-dimensional trajectories,” Adv. Intell. Syst., vol. 6, no. 5, Art. no. 2300865, May 2024
work page 2024
-
[22]
T. Li, et al., “Giant voltage-induced deformation in dielectric elastomers near the verge of snap-through instability,” J. Mech. Phys. Solids, vol. 61, no. 2, pp. 611–628, 2013
work page 2013
-
[23]
Two types of transitions to wrinkles in dielectric elastomers,
J. Zhu, M. Kollosche, T. Lu, G. Kofod, and Z. Suo, “Two types of transitions to wrinkles in dielectric elastomers,” Soft Matter, vol. 8, no. 34, pp. 8840–8846, 2012
work page 2012
-
[24]
X. Zhao and Q. Wang, “Harnessing large deformation and instabilities of soft dielectrics: Theory, experiment, and application,” Appl. Phys. Rev., vol. 1, no. 2, Art. no. 21304, May 2014
work page 2014
-
[25]
Soft pocket pump for multi-medium transportation via an active tubular diaphragm,
S. Jiang, C. Tang, X. Dong, X.-J. Liu, and H. Zhao, “Soft pocket pump for multi-medium transportation via an active tubular diaphragm,” Adv. Funct. Mater., vol. 33, Art. no. 2305289, Aug. 2023
work page 2023
-
[26]
A dynamic electrically driven soft valve for control of soft hydraulic actuators,
S. Xu, Y. Chen, N. P. Hyun, K. P. Becker, and R. J. Wood, “A dynamic electrically driven soft valve for control of soft hydraulic actuators,” Proc. Natl. Acad. Sci. USA, vol. 118, no. 34, Art. no. e2103198118, Aug. 2021
work page 2021
-
[27]
Laser-assisted failure recovery for dielectric elastomer actuators in aerial robots,
S. Kim et al., “Laser-assisted failure recovery for dielectric elastomer actuators in aerial robots,” Sci. Robot., vol. 8, no. 76, Art. no. eadf4278, Nov. 2025
work page 2025
-
[28]
R. D. Kornbluh et al., “Electroelastomers: applications of dielectric elastomer transducers for actuation, generation, and smart structures,” in Proc. SPIE, Jul. 2002, vol. 4698, pp. 254–270
work page 2002
-
[29]
Stacked dielectric elastomer actuator for tensile force transmission,
G. Kovacs, L. Düring, S. Michel, and G. Terrasi, “Stacked dielectric elastomer actuator for tensile force transmission,” Sens. Actuators A: Phys., vol. 155, no. 2, pp. 299–307, 2009
work page 2009
-
[30]
A small biomimetic quadruped robot driven by multistacked dielectric elastomer actuators,
C. T. Nguyen et al., “A small biomimetic quadruped robot driven by multistacked dielectric elastomer actuators,” Smart Mater. Struct., vol. 23, no. 6, Art. no. 65005, 2014
work page 2014
-
[31]
Helical dielectric elastomer actuators,
F. Carpi, A. Migliore, G. Serra, and D. De Rossi, “Helical dielectric elastomer actuators,” Smart Mater. Struct., vol. 14, no. 6, pp. 1210–1216, 2005
work page 2005
-
[32]
Folded dielectric elastomer actuators,
F. Carpi, C. Salaris, and D. De Rossi, “Folded dielectric elastomer actuators,” Smart Mater. Struct., vol. 16, no. 2, pp. S300–S305, 2007
work page 2007
-
[33]
Advances in dielectric elastomer actuation technology,
N. Wang, C. Cui, H. Guo, B. Chen, and X. Zhang, “Advances in dielectric elastomer actuation technology,” Sci. China Technol. Sci., vol. 61, no. 10, pp. 1512–1527, 2018
work page 2018
-
[34]
Review of dielectric elastomer actuators and their applications in soft robots,
Y. Guo, L. Liu, Y. Liu, and J. Leng, “Review of dielectric elastomer actuators and their applications in soft robots,” Adv. Intell. Syst., vol. 3, no. 10, Art. no. 2000282, Oct. 2021
work page 2021
-
[35]
Characteristics, Applications and Properties of Polymers,
H. F. Brinson and L. C. Brinson, “Characteristics, Applications and Properties of Polymers,” in Polymer Engineering Science and Viscoelasticity, 2nd ed., Springer New York, NY, 2015, pp. 57–100
work page 2015
-
[36]
Dynamic electromechanical modeling of dielectric elastomer actuators with metallic electrodes,
R. Sarban, B. Lassen, and M. Willatzen, “Dynamic electromechanical modeling of dielectric elastomer actuators with metallic electrodes,” IEEE/ASME Trans. Mechatron., vol. 17, no. 5, pp. 960–967, 2012
work page 2012
-
[37]
J. Zou, G. Gu, and L. Zhu, “Open-loop control of creep and vibration in dielectric elastomer actuators with phenomenological models,” IEEE/ASME Trans. Mechatron., vol. 22, no. 1, pp. 51–58, 2017
work page 2017
-
[38]
J. Zou and G. Gu, “High-precision tracking control of a soft dielectric elastomer actuator with inverse viscoelastic hysteresis compensation,” IEEE/ASME Trans. Mechatron., vol. 24, no. 1, pp. 36–44, 2019
work page 2019
-
[39]
M. Brokate and J. Sprekels, Hysteresis and Phase Transitions. Springer- Verlag New York, NY, 1996
work page 1996
-
[40]
Modeling of viscoelastic electromechanical behavior in a soft dielectric elastomer actuator,
G. Gu, U. Gupta, J. Zhu, L. Zhu, and X. Zhu, “Modeling of viscoelastic electromechanical behavior in a soft dielectric elastomer actuator,” IEEE Trans. Robot., vol. 33, no. 5, pp. 1263–1271, 2017
work page 2017
-
[41]
Characterization and modeling of viscoelastic hysteresis in a dielectric elastomer actuator,
Y. Zhao, G. Meng, and W.-M. Zhang, “Characterization and modeling of viscoelastic hysteresis in a dielectric elastomer actuator,” Smart Mater. Struct., vol. 29, Art. no. 055019, Mar. 2020
work page 2020
-
[42]
Characterisation, modelling and hysteresis compensation in a tubular dielectric elasomer actuator,
Y. Zhang, K. Wang, and R. W. Jones, “Characterisation, modelling and hysteresis compensation in a tubular dielectric elasomer actuator,” in IEEE/ASME Int. Conf. Adv. Intell. Mechatron., 2010, pp. 884–889
work page 2010
-
[43]
P. Tian, R. W. Jones, and F. Yu, “Elliptical modelling of hysteresis operating characteristics in a dielectric elastomer tubular actuator,” Smart Mater. Struct., vol. 25, no. 7, Art. no. 75038, 2016
work page 2016
-
[44]
Modeling and control of piezo-actuated nanopositioning stages: A survey,
G. Gu, L. Zhu, C. Su, H. Ding, and S. Fatikow, “Modeling and control of piezo-actuated nanopositioning stages: A survey,” IEEE Trans. Automat. Sci. Eng., vol. 13, no. 1, pp. 313–332, 2016
work page 2016
-
[45]
Y. Zhao and L. Wen, “Dynamic modeling with quantifying dissipated power density and experimental validation of dielectric elastomer actuators,” Smart Mater. Struct., vol. 32, no. 5, Art. no. 55013, 2023
work page 2023
-
[46]
A survey of control issues in nanopositioning,
S. Devasia, E. Eleftheriou, and S. O. R. Moheimani, “A survey of control issues in nanopositioning,” IEEE Trans. Control Sys. Technol., vol. 15, no. 5, pp. 802–823, 2007
work page 2007
-
[47]
Compact dielectric elastomer linear actuators,
H. Zhao et al., “Compact dielectric elastomer linear actuators,” Adv. Funct. Mater., vol. 28, no. 42, Art. no. 1804328, Oct. 2018
work page 2018
-
[48]
Collision resilient insect-scale soft-actuated aerial robots with high agility,
Y. Chen, S. Xu, Z. Ren, and P. Chirarattananon, “Collision resilient insect-scale soft-actuated aerial robots with high agility,” IEEE Trans. Robot., vol. 37, no. 5, pp. 1752–1764, 2021
work page 2021
-
[49]
Electrostriction of polymer dielectrics with compliant electrodes as a means of actuation,
R. E. Pelrine, R. D. Kornbluh, and J. P. Joseph, “Electrostriction of polymer dielectrics with compliant electrodes as a means of actuation,” Sens. Actuators A: Phys., vol. 64, no. 1, pp. 77–85, 1998. 20 MODELING, CONTROL AND SELF-SENSING OF DIELECTRIC ELASTOMER SOFT ACTUATORS: A REVIEW
work page 1998
-
[50]
Advances in dielectric elastomers for actuators and artificial muscles,
P. Brochu and Q. Pei, “Advances in dielectric elastomers for actuators and artificial muscles,” Macromol. Rapid Commun., vol. 31, no. 1, pp. 10–36, 2010
work page 2010
-
[51]
A review on high-frequency dielectric elastomer actuators: materials, dynamics, and applications,
C. Tang et al., “A review on high-frequency dielectric elastomer actuators: materials, dynamics, and applications,” Adv. Intell. Syst., vol. 6, no. 2, Art. no. 2300047, Feb. 2024
work page 2024
-
[52]
M. Benslimane, H.-E. Kiil, and M. J. Tryson, “Electromechanical properties of novel large strain PolyPower film and laminate components for DEAP actuator and sensor applications,” in Proc. SPIE, Apr. 2010, vol. 7642, Art. no. 764231
work page 2010
-
[53]
G. Rizzello, M. Hodgins, D. Naso, A. York, and S. Seelecke, “Modeling of the effects of the electrical dynamics on the electromechanical response of a DEAP circular actuator with a mass–spring load,” Smart Mater. Struct., vol. 24, no. 9, Art. no. 94003, 2015
work page 2015
-
[54]
Closed loop control of dielectric elastomer actuators based on self-sensing displacement feedback,
G. Rizzello, D. Naso, A. York, and S. Seelecke, “Closed loop control of dielectric elastomer actuators based on self-sensing displacement feedback,” Smart Mater. Struct., vol. 25, no. 3, Art. no. 35034, 2016
work page 2016
-
[55]
Self-sensing of dielectric elastomer tubular actuator with feedback control validation,
S. Wang, T. Kaaya, and Z. Chen, “Self-sensing of dielectric elastomer tubular actuator with feedback control validation,” Smart Mater. Struct., vol. 29, no. 7, Art. no. 75037, 2020
work page 2020
-
[56]
Dielectric elastomer actuators,
G. Kofod, “Dielectric elastomer actuators,” Ph.D. dissertation, The Technical University of Denmark, 2001
work page 2001
-
[57]
Modeling of a pre-strained circular actuator made of dielectric elastomers,
M. Wissler and E. Mazza, “Modeling of a pre-strained circular actuator made of dielectric elastomers,” Sens. Actuators A: Phys., vol. 120, no. 1, pp. 184–192, 2005
work page 2005
-
[58]
A new constitutive relation for rubber,
A. N. Gent, “A new constitutive relation for rubber,” Rubber Chem. Technol., vol. 69, no. 1, pp. 59–61, 1996
work page 1996
-
[59]
Complex interplay of nonlinear processes in dielectric elastomers,
M. Kollosche, J. Zhu, Z. Suo, and G. Kofod, “Complex interplay of nonlinear processes in dielectric elastomers,” Phys. Rev. E, vol. 85, no. 5, Art. no. 51801, May 2012
work page 2012
-
[60]
Performance improvement of planar dielectric elastomer actuators by magnetic modulating mechanism,
Y.-H. Zhao, W.-B. Li, W.-M. Zhang, H. Yan, Z.-K. Peng, and G. Meng, “Performance improvement of planar dielectric elastomer actuators by magnetic modulating mechanism,” Smart Mater. Struct., vol. 27, no. 6, Art. no. 65007, 2018
work page 2018
-
[61]
Characterization of dielectric elastomer actuators based on a visco-hyperelastic film model,
P. Lochmatter, G. Kovacs, and M. Wissler, “Characterization of dielectric elastomer actuators based on a visco-hyperelastic film model,” Smart Mater. Struct., vol. 16, no. 2, pp. 477–486, 2007
work page 2007
-
[62]
Constitutive modeling of the large strain time-dependent behavior of elastomers,
J. S. Bergström and M. C. Boyce, “Constitutive modeling of the large strain time-dependent behavior of elastomers,” J. Mech. Phys. Solids, vol. 46, no. 5, pp. 931–954, 1998
work page 1998
-
[63]
Model of dissipative dielectric elastomers,
C. Chiang Foo, S. Cai, S. Jin Adrian Koh, S. Bauer, and Z. Suo, “Model of dissipative dielectric elastomers,” J. Appl. Phys., vol. 111, no. 3, Art. no. 34102, Feb. 2012
work page 2012
-
[64]
Robust position control of dielectric elastomer actuators based on LMI optimization,
G. Rizzello, D. Naso, B. Turchiano, and S. Seelecke, “Robust position control of dielectric elastomer actuators based on LMI optimization,” IEEE Trans. Control Sys. Technol., vol. 24, no. 6, pp. 1909–1921, 2016
work page 1909
-
[65]
Adaptive sliding-mode position control for dielectric elastomer actuators,
T. Hoffstadt and J. Maas, “Adaptive sliding-mode position control for dielectric elastomer actuators,” IEEE/ASME Trans. Mechatron., vol. 22, no. 5, pp. 2241–2251, 2017
work page 2017
-
[66]
Modeling and simulation of dielectric elastomer actuators,
M. Wissler and E. Mazza, “Modeling and simulation of dielectric elastomer actuators,” Smart Mater. Struct., vol. 14, no. 6, pp. 1396–1402, 2005
work page 2005
-
[67]
Mechanical behavior of an acrylic elastomer used in dielectric elastomer actuators,
M. Wissler and E. Mazza, “Mechanical behavior of an acrylic elastomer used in dielectric elastomer actuators,” Sens. Actuators A: Phys., vol. 134, no. 2, pp. 494–504, 2007
work page 2007
-
[68]
Electro- elastomers: Large deformation analysis of silicone membranes,
N. C. Goulbourne, E. M. Mockensturm, and M. I. Frecker, “Electro- elastomers: Large deformation analysis of silicone membranes,” Int. J. Solids Struct., vol. 44, no. 9, pp. 2609–2626, 2007
work page 2007
-
[69]
Theory of dielectric elastomers,
Z. Suo, “Theory of dielectric elastomers,” Acta Mech.Solida Sin., vol. 23, no. 6, pp. 549–578, 2010
work page 2010
-
[70]
Nonequilibrium thermodynamics of dielectric elastomers,
X. Zhao, S. J. A. Koh, and Z. Suo, “Nonequilibrium thermodynamics of dielectric elastomers,” Int. J. Appl. Mech., vol. 03, no. 02, pp. 203–217, Jun. 2011
work page 2011
-
[71]
Actuating dielectric elastomers in pure shear deformation by elastomeric conductors,
Y. Wang, B. Chen, Y. Bai, H. Wang, and J. Zhou, “Actuating dielectric elastomers in pure shear deformation by elastomeric conductors,” Appl. Phys. Lett., vol. 104, no. 6, Art. no. 64101, Feb. 2014
work page 2014
-
[72]
C. Keplinger, T. Li, R. Baumgartner, Z. Suo, and S. Bauer, “Harnessing snap-through instability in soft dielectrics to achieve giant voltage- triggered deformation,” Soft Matter, vol. 8, no. 2, pp. 285–288, 2012
work page 2012
-
[73]
Electromechanical and dynamic analyses of tunable dielectric elastomer resonator,
T. Li, S. Qu, and W. Yang, “Electromechanical and dynamic analyses of tunable dielectric elastomer resonator,” Int. J. Solids Struct., vol. 49, no. 26, pp. 3754–3761, 2012
work page 2012
-
[74]
J. Zou and G. Gu, “Feedforward control of the rate-dependent viscoelastic hysteresis nonlinearity in dielectric elastomer actuators,” IEEE Robot. Autom. Lett., vol. 4, no. 3, pp. 2340–2347, 2019
work page 2019
-
[75]
P. Huang, J. Wu, P. Zhang, Y. Wang, and C.-Y. Su, “Dynamic modeling and tracking control for dielectric elastomer actuator with a model predictive controller,” IEEE Trans. Ind. Electron., vol. 69, no. 2, pp. 1819–1828, 2022
work page 2022
-
[76]
Adaptive control method for conically shaped dielectric elastomer actuator with different loads,
Y. Zhang, Y. Wang, J. Wu, Q. Meng, and C.-Y. Su, “Adaptive control method for conically shaped dielectric elastomer actuator with different loads,” IEEE Trans. Automat. Sci. Eng., vol. 21, no. 3, pp. 2613–2621, 2024
work page 2024
-
[77]
Theory of ferromagnetic hysteresis,
D. C. Jiles and D. L. Atherton, “Theory of ferromagnetic hysteresis,” J. Magn. Magn. Mater., vol. 61, no. 1, pp. 48–60, 1986
work page 1986
-
[78]
A domain wall model for hysteresis in piezoelectric materials,
R. C. Smith and Z. Ounaies, “A domain wall model for hysteresis in piezoelectric materials,” J. Intell. Mater. Syst. Struct., vol. 11, no. 1, pp. 62–79, Jan. 2000
work page 2000
-
[79]
A survey of the hysteretic Duhem model,
F. Ikhouane, “A survey of the hysteretic Duhem model,” Arch. Comput. Methods Eng., vol. 25, no. 4, pp. 965–1002, 2018
work page 2018
-
[80]
Y. Zhang, Y. Wang, J. Wu, Q. Meng, and C.-Y. Su, “Model reference adaptive control method for dielectric elastomer material-based intelligent actuator,” IEEE Trans. Syst., Man, Cybern.: Syst., vol. 54, no. 4, pp. 2181–2191, 2024
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.