Geometric quantification for nonlinear deformation in knitted fabrics
Pith reviewed 2026-05-10 02:20 UTC · model grok-4.3
The pith
Knitted fabrics' nonlinear deformations can be quantified by decomposing them into stitch reorientation, loop bending, surface bending, and dilation using reconstructed yarn geometry.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that global deformation in knitted structures distributes among stitch reorientation, loop bending, surface bending, and dilation, while regions of large geometric variation emerge, persist, and redistribute over time; these effects are captured by reconstructing smooth yarn centerlines and fabric surfaces from sparse representations and extracting multi-dimensional geometric descriptors that define a unified state space for comparison.
What carries the argument
The geometric quantification framework that reconstructs smooth yarn centerlines and fabric surfaces from sparse yarn-level data and extracts interpretable descriptors across dimensions to represent deformation.
If this is right
- Global deformation distributes among stitch reorientation, loop bending, surface bending, and dilation.
- Regions of large geometric variation emerge, persist, and redistribute over time.
- A unified geometric state space allows direct comparison of different knitted structures.
- The descriptors can couple to constitutive models, experimental data, and inverse-design workflows.
Where Pith is reading between the lines
- The geometric descriptors could help predict areas prone to mechanical failure in fabrics before running full simulations.
- The reconstruction approach might extend to other yarn-based or filamentary soft materials for similar deformation analysis.
- It could support pattern optimization in knitting to achieve targeted shape changes or energy absorption.
Load-bearing premise
Smooth yarn centerlines and fabric surfaces can be accurately reconstructed from sparse representations, and these geometric descriptors alone suffice to capture and compare the nonlinear deformation.
What would settle it
Controlled mechanical tests on knitted samples that measure actual stress or damage locations and show no correspondence with the framework's high-variation regions would falsify the claim that geometry alone identifies mechanical localization.
Figures





read the original abstract
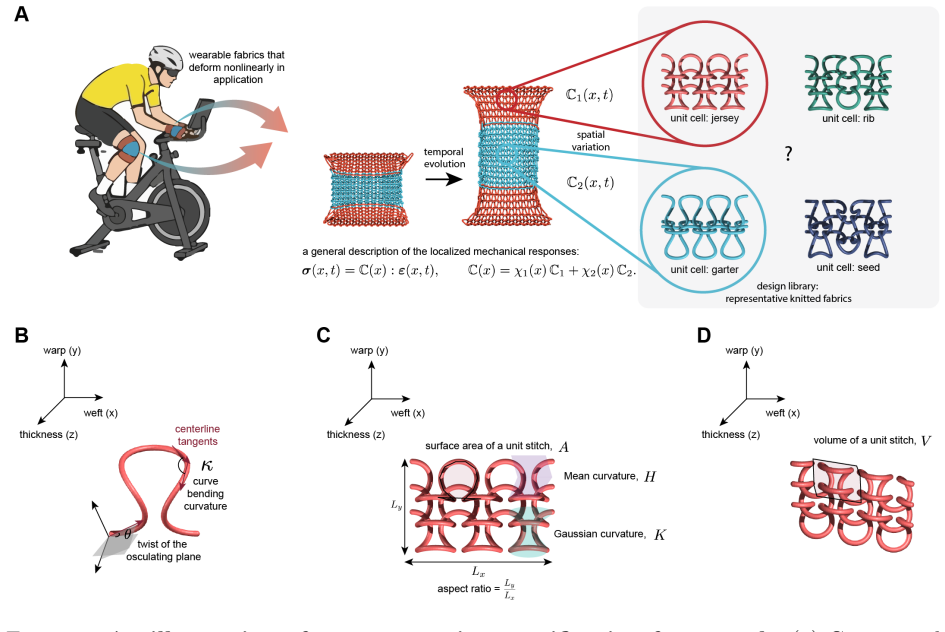
Knitted fabrics exemplify a broad class of architected materials capable of large deformations, enabling shape morphing, mechanical biocompatibility, and embedded multifunctionality without material damage. Although geometric nonlinearity has been intuitively utilized in their design, a quantitative description of stitch-resolved deformation and its temporal evolution remains lacking. Here, we introduce a geometric quantification framework that reconstructs smooth yarn centerlines and fabric surfaces from sparse yarn-level representations and extracts interpretable descriptors across dimensions. Applied to representative knitted structures, this framework resolves how global deformation is distributed among stitch reorientation, loop bending, surface bending, and dilation. Moreover, it reveals how regions of large geometric variation emerge, persist, and redistribute over time. Rather than directly measuring stress, these geometric descriptors define a unified geometric state space for comparing knitted structures and identifying candidate regions of mechanical localization. The framework provides a quantitative language for nonlinear deformation in knits and establishes a geometry-based representation that can be coupled to constitutive models, experimental measurements, and graph-based inverse-design workflows.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a purely geometric framework that reconstructs smooth yarn centerlines and fabric surfaces from sparse yarn-level data, then extracts multi-scale descriptors to decompose global deformation in knits into stitch reorientation, loop bending, surface bending, and dilation while tracking the emergence and redistribution of high-variation regions over time. These descriptors are positioned as a unified geometric state space for comparing structures and identifying candidate localization sites, without direct stress computation, to be coupled later with constitutive models or experiments.
Significance. If the reconstruction accuracy and descriptor interpretability hold, the work supplies a missing quantitative language for stitch-resolved nonlinear geometry in knits, enabling systematic comparison across designs and a geometry-first route to inverse design. The decomposition into independent modes and the temporal tracking of variation regions are potentially useful for coupling to mechanics, though the manuscript supplies no mechanical validation data to confirm this utility.
major comments (3)
- [§3.2] §3.2 (reconstruction pipeline): The claim that smooth centerlines and surfaces are accurately recovered from sparse representations is load-bearing for all downstream descriptors, yet no quantitative error metrics (e.g., Hausdorff distance to ground-truth centerlines or curvature deviation) or sensitivity analysis to sampling density are provided; without these, it is impossible to assess whether the reported mode distributions are robust or artifact-dominated.
- [§4.3 and §5] §4.3 and §5 (deformation decomposition): The assertion that global deformation is resolved among the four modes rests on the geometric descriptors alone, but the manuscript contains no cross-validation against independent strain measurements, finite-element results, or literature benchmarks for the same knit topologies; this leaves open whether the decomposition captures mechanically meaningful partitions or merely reflects the chosen geometric proxies.
- [§5.1] §5.1 (temporal tracking): The identification of persistent high-variation regions is presented as a key result, but the paper does not report statistical significance tests or controls for reconstruction noise; without these, it is unclear whether the observed emergence/persistence/redistribution patterns exceed what would arise from measurement uncertainty alone.
minor comments (3)
- [Figure 2] Figure 2 caption and axis labels: the color scale for geometric variation is not numerically defined, making it impossible to compare magnitudes across panels or replicates.
- [§4.1] Notation: the symbols for loop bending curvature and surface bending curvature are introduced without an explicit table of definitions, leading to occasional ambiguity in §4.1.
- [Abstract and §5] The abstract states that the framework 'resolves' the distribution of deformation, but the results section only shows qualitative visualizations; a quantitative breakdown (e.g., fractional contributions per mode) should be added to a table.
Simulated Author's Rebuttal
We thank the referee for their careful reading and insightful comments on our manuscript. We address each major point below, providing the strongest honest response possible while clarifying the geometric scope of the work. Revisions have been made where they strengthen the presentation without altering the core claims.
read point-by-point responses
-
Referee: [§3.2] §3.2 (reconstruction pipeline): The claim that smooth centerlines and surfaces are accurately recovered from sparse representations is load-bearing for all downstream descriptors, yet no quantitative error metrics (e.g., Hausdorff distance to ground-truth centerlines or curvature deviation) or sensitivity analysis to sampling density are provided; without these, it is impossible to assess whether the reported mode distributions are robust or artifact-dominated.
Authors: We agree that quantitative validation of the reconstruction would increase confidence in the downstream descriptors. Ground-truth centerline data for the physical knits studied here is unavailable, precluding direct metrics such as Hausdorff distance. However, we have added a sensitivity analysis to sampling density in the revised §3.2 by systematically subsampling the input points, recomputing the descriptors, and showing that the mode distributions and high-variation regions remain stable above a minimum density threshold consistent with our experimental sampling. A brief discussion of reconstruction assumptions and potential artifacts has also been included. revision: partial
-
Referee: [§4.3 and §5] §4.3 and §5 (deformation decomposition): The assertion that global deformation is resolved among the four modes rests on the geometric descriptors alone, but the manuscript contains no cross-validation against independent strain measurements, finite-element results, or literature benchmarks for the same knit topologies; this leaves open whether the decomposition captures mechanically meaningful partitions or merely reflects the chosen geometric proxies.
Authors: The manuscript is explicitly a geometric framework, as stated in the abstract and introduction: it supplies descriptors for a unified geometric state space rather than claiming direct mechanical fidelity. Cross-validation with strain or FE data would require constitutive models or experiments outside the present scope. We have revised §4.3 and §5 to more explicitly delineate this boundary, to relate each geometric mode to expected mechanical interpretations drawn from the literature, and to outline how the descriptors can be coupled to future mechanical models. This clarifies that the partitions are geometric by construction while preserving the paper's intended contribution. revision: partial
-
Referee: [§5.1] §5.1 (temporal tracking): The identification of persistent high-variation regions is presented as a key result, but the paper does not report statistical significance tests or controls for reconstruction noise; without these, it is unclear whether the observed emergence/persistence/redistribution patterns exceed what would arise from measurement uncertainty alone.
Authors: We acknowledge the value of quantifying robustness to noise. In the revised manuscript we have added a noise-sensitivity study in §5.1: synthetic Gaussian noise matching estimated experimental uncertainty is superimposed on the input points, the full pipeline is re-run, and the stability of the high-variation regions is reported. We have also included a permutation-based control that compares observed variation metrics against those obtained from spatially randomized data, establishing that the reported persistence and redistribution patterns are statistically distinguishable from noise-induced artifacts at the p < 0.05 level. revision: yes
Circularity Check
No significant circularity; framework is an independent geometric tool
full rationale
The paper introduces a new geometric quantification framework that reconstructs smooth yarn centerlines and fabric surfaces from sparse yarn-level representations, then extracts descriptors to decompose global deformation into modes such as stitch reorientation, loop bending, surface bending, and dilation. This process is presented as a forward construction of geometric state space from input representations, without any equations or claims that reduce a prediction or central result back to fitted parameters, self-defined quantities, or load-bearing self-citations. The abstract and description position the work as providing descriptors for later coupling to mechanics rather than deriving mechanical outcomes from the geometry by construction. No uniqueness theorems, ansatzes smuggled via citation, or renaming of known results appear in the provided chain. The derivation remains self-contained as a descriptive geometric pipeline applied to knitted structures.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Flexible mechanical meta- materials,
K. Bertoldi, V. Vitelli, J. Christensen, and M. Van Hecke, “Flexible mechanical meta- materials,”Nature Reviews Materials, vol. 2, no. 11, pp. 1–11, 2017
work page 2017
-
[2]
W. P. Moestopo, S. Shaker, W. Deng, and J. R. Greer, “Knots are not for naught: Design, properties, and topology of hierarchical intertwined microarchitected materials,” Science Advances, vol. 9, no. 10, p. eade6725, 2023
work page 2023
-
[3]
Double-network-inspired mechanical metamaterials,
J. U. Surjadi, B. F. Aymon, M. Carton, and C. M. Portela, “Double-network-inspired mechanical metamaterials,”Nature Materials, vol. 24, pp. 945–954, 2025
work page 2025
-
[4]
E. Pescialli, A. Munoz Lopez, K. Karapiperis, and D. M. Kochmann, “Topology-informed design of intertwined architected materials: Unifying woven, knotted, and closed-chain networks,”Materials & Design, vol. 260, p. 114974, 2025
work page 2025
-
[5]
Programming shape using kirigami tessellations,
G. P. T. Choi, L. H. Dudte, and L. Mahadevan, “Programming shape using kirigami tessellations,”Nature Materials, vol. 18, no. 9, pp. 999–1004, 2019
work page 2019
-
[6]
Compact reconfigurable kirigami,
G. P. T. Choi, L. H. Dudte, and L. Mahadevan, “Compact reconfigurable kirigami,” Physiscal Review Research, vol. 3, p. 043030, Oct 2021
work page 2021
-
[7]
Boundary curvature guided programmable shape-morphing kirigami sheets,
Y. Hong, Y. Chi, S. Wu, Y. Li, Y. Zhu, and J. Yin, “Boundary curvature guided programmable shape-morphing kirigami sheets,”Nature Communications, vol. 13, no. 1, p. 530, 2022
work page 2022
-
[8]
K. K. Dudek, M. Kadic, C. Coulais, and K. Bertoldi, “Shape-morphing metamaterials,” Nature Reviews Materials, vol. 10, pp. 783–798, 2025. 16
work page 2025
-
[9]
Digital logic gates in soft, conductive mechanical metamaterials,
C. El Helou, P. R. Buskohl, C. E. Tabor, and R. L. Harne, “Digital logic gates in soft, conductive mechanical metamaterials,”Nature Communications, vol. 12, no. 1, p. 1633, 2021
work page 2021
-
[10]
A. Mohammadi, Y. Tan, P. Choong, and D. Oetomo, “Flexible mechanical metamaterials enabling soft tactile sensors with multiple sensitivities at multiple force sensing ranges,” Scientific Reports, vol. 11, no. 1, p. 24125, 2021
work page 2021
-
[11]
Mechanical metamaterials and beyond,
P. Jiao, J. Mueller, J. R. Raney, X. Zheng, and A. H. Alavi, “Mechanical metamaterials and beyond,”Nature Communications, vol. 14, no. 1, p. 6004, 2023
work page 2023
-
[12]
Digital fabrication of pneumatic actuators with integrated sensing by machine knitting,
Y. Luo, K. Wu, A. Spielberg, M. Foshey, D. Rus, T. Palacios, and W. Matusik, “Digital fabrication of pneumatic actuators with integrated sensing by machine knitting,”Pro- ceedings of the 2022 CHI Conference on Human Factors in Computing Systems, pp. 1–13, 2022
work page 2022
-
[13]
3D knitting for pneumatic soft robotics,
V. Sanchez, K. Mahadevan, G. Ohlson, M. A. Graule, M. C. Yuen, C. B. Teeple, J. C. Weaver, J. McCann, K. Bertoldi, and R. J. Wood, “3D knitting for pneumatic soft robotics,”Advanced Functional Materials, vol. 33, no. 26, p. 2212541, 2023
work page 2023
-
[14]
Soft wearable robotics: Innovative knitting- integrated approaches for pneumatic actuators design,
M. Wang, Y. Zhou, and R. Stewart, “Soft wearable robotics: Innovative knitting- integrated approaches for pneumatic actuators design,” inCompanion Publication of the 2024 ACM Designing Interactive Systems Conference, pp. 234–238, 2024
work page 2024
-
[15]
Learning human–environment interactions using conformal tactile textiles,
Y. Luo, Y. Li, P. Sharma, W. Shou, K. Wu, M. Foshey, B. Li, T. Palacios, A. Torralba, and W. Matusik, “Learning human–environment interactions using conformal tactile textiles,”Nature Electronics, vol. 4, pp. 193–201, 2021
work page 2021
-
[16]
X. Wan, Y. Shen, T. Luo, M. Xu, H. Cong, C. Chen, G. Jiang, and H. He, “All- textile piezoelectric nanogenerator based on 3D knitted fabric electrode for wearable applications,”ACS Sensors, vol. 9, no. 6, pp. 2989–2998, 2024. PMID: 38771707
work page 2024
-
[17]
Z. Kou, C. Zhang, B. Yu, H. Chen, Z. Liu, and W. Lu, “Wearable all-fabric hybrid energy harvester to simultaneously harvest radiofrequency and triboelectric energy,”Advanced Science, vol. 11, no. 17, p. 2309050, 2024
work page 2024
-
[18]
Y. Zhou, Y. Sun, Y. Li, C. Shen, Z. Lou, X. Min, and R. Stewart, “A highly durable and UV-resistant graphene-based knitted textile sensing sleeve for human joint angle monitoring and gesture differentiation,”Advanced Intelligent Systems, vol. 6, no. 10, p. 2400124, 2024
work page 2024
-
[19]
Blooming knit flowers: loop-linked soft morphing structures for soft robotics,
M.-W. Han and S.-H. Ahn, “Blooming knit flowers: loop-linked soft morphing structures for soft robotics,”Advanced Materials, vol. 29, no. 13, p. 1606580, 2017
work page 2017
-
[20]
Knitting and weaving artificial muscles,
A. Maziz, A. Concas, A. Khaldi, J. St˚ alhand, N.-K. Persson, and E. Jager, “Knitting and weaving artificial muscles,”Science Advances, vol. 3, no. 1, p. e1600327, 2017. 17
work page 2017
-
[21]
Multi-sensorized pneumatic artificial muscle yarns,
C. Fu, K. Wang, W. Tang, A. Nilghaz, C. Hurren, X. Wang, W. Xu, B. Su, and Z. Xia, “Multi-sensorized pneumatic artificial muscle yarns,”Chemical Engineering Journal, vol. 446, p. 137241, 2022
work page 2022
-
[22]
Ge- ometric modeling of knitted fabrics using helicoid scaffolds,
P. Wadekar, P. Goel, C. Amanatides, G. Dion, R. D. Kamien, and D. E. Breen, “Ge- ometric modeling of knitted fabrics using helicoid scaffolds,”Journal of Engineering Fibres and Fabrics, vol. 15, p. 1558925020913871, 2020
work page 2020
-
[23]
L. Kapllani, C. Amanatides, G. Dion, V. Shapiro, and D. E. Breen, “TopoKnit: A process-oriented representation for modeling the topology of yarns in weft-knitted textiles,” Graphical Models, vol. 118, p. 101114, 2021
work page 2021
-
[24]
Loop order analysis of weft- knitted textiles,
L. Kapllani, C. Amanatides, G. Dion, and D. E. Breen, “Loop order analysis of weft- knitted textiles,”Textiles, vol. 2, no. 2, pp. 275–295, 2022
work page 2022
-
[25]
Methods for numerical simulation of knit based morphable structures: knitmorphs,
S. K. Rout, M. R. Bisram, and J. Cao, “Methods for numerical simulation of knit based morphable structures: knitmorphs,”Scientific Reports, vol. 12, 12 2022
work page 2022
-
[26]
Geometric modeling of knitted fabrics,
L. Niu, G. Dion, and R. D. Kamien, “Geometric modeling of knitted fabrics,”Proceedings of the National Academy of Sciences, vol. 122, no. 7, p. e2416536122, 2025
work page 2025
-
[27]
M. Bergou, M. Wardetzky, S. Robinson, B. Audoly, and E. Grinspun, “Discrete elastic rods,” inACM SIGGRAPH 2008 Papers, SIGGRAPH ’08, (New York, NY, USA), Association for Computing Machinery, 2008
work page 2008
-
[28]
Efficient yarn-based cloth with adaptive contact linearization,
J. M. Kaldor, D. L. James, and S. Marschner, “Efficient yarn-based cloth with adaptive contact linearization,”ACM Transactions on Graphics, vol. 29, pp. 1–10, 2010
work page 2010
-
[29]
Unravelling the mechanics of knitted fabrics through hierarchical geometric representation,
X. Ding, V. Sanchez, K. Bertoldi, and C. H. Rycroft, “Unravelling the mechanics of knitted fabrics through hierarchical geometric representation,”Proceedings of the Royal Society A, vol. 480, no. 2295, p. 20230753, 2024
work page 2024
-
[30]
Vic2d: Digital image correlation software,
Vic2D Development Team, “Vic2d: Digital image correlation software,” 2023. Accessed: 2025-11-13
work page 2023
-
[31]
Dicengine: Digital image correlation engine,
DICengine Development Team, “Dicengine: Digital image correlation engine,” 2024. Accessed: 2025-11-13
work page 2024
-
[32]
Three-dimensional image correlation from X-ray computed tomography of solid foam,
S. Roux, F. Hild, P. Viot, and D. Bernard, “Three-dimensional image correlation from X-ray computed tomography of solid foam,”Composites Part A: Applied Science and Manufacturing, vol. 39, no. 8, pp. 1253–1265, 2008. Full-field Measurements in Composites Testing and Analysis
work page 2008
-
[33]
Deformation tracking of truss lattices under dynamic loading based on digital image correlation,
K. Radi, F. Allamand, and D. M. Kochmann, “Deformation tracking of truss lattices under dynamic loading based on digital image correlation,”Mechanics of Materials, vol. 183, p. 104658, 2023. 18
work page 2023
-
[34]
Graph-based metamaterials: Deep learning of structure-property relations,
P. P. Meyer, C. Bonatti, T. Tancogne-Dejean, and D. Mohr, “Graph-based metamaterials: Deep learning of structure-property relations,”Materials & Design, vol. 223, p. 111175, 2022
work page 2022
-
[35]
K. Karapiperis and D. M. Kochmann, “Prediction and control of fracture paths in disor- dered architected materials using graph neural networks,”Communications Engineering, vol. 2, no. 1, p. 32, 2023
work page 2023
-
[36]
L. Zheng, K. Karapiperis, S. Kumar, and D. M. Kochmann, “Unifying the design space and optimizing linear and nonlinear truss metamaterials by generative modeling,”Nature Communications, vol. 14, no. 1, p. 7563, 2023
work page 2023
-
[37]
Topological mechanics of knots and tangles,
V. P. Patil, J. D. Sandt, M. Kolle, and J. Dunkel, “Topological mechanics of knots and tangles,”Science, vol. 367, no. 6473, pp. 71–75, 2020
work page 2020
-
[38]
Discrete differential geometry for simulating nonlinear behaviors of flexible systems: A survey,
D. Tong, A. Choi, J. Wang, W. Huang, Z. Chen, J. Li, X. Huang, M. Liu, H. Gao, and K. J. Hsia, “Discrete differential geometry for simulating nonlinear behaviors of flexible systems: A survey,”Extreme Mechanics Letters, vol. 82, p. 102430, 2026
work page 2026
-
[39]
frenet robust, MATLAB Central File Exchange,
B. Friedrich, “frenet robust, MATLAB Central File Exchange,” 2014. https://www. mathworks.com/matlabcentral/fileexchange/47885-frenet_robust-zip, accessed on November 18, 2025
work page 2014
-
[40]
Bezier Surface, MATLAB Central File Exchange,
S. Mohanty, “Bezier Surface, MATLAB Central File Exchange,” 2015. https://www. mathworks.com/matlabcentral/fileexchange/66678-bezier-surface, accessed on November 18, 2025
work page 2015
-
[41]
Minimal Bounding Box, MATLAB Central File Exchange,
J. Korsawe, “Minimal Bounding Box, MATLAB Central File Exchange,” 2015. https:// www.mathworks.com/matlabcentral/fileexchange/18264-minimal-bounding-box , accessed on November 18, 2025. 19 Supplementary Information S1 Curve quantification Here we present the mathematical details of our curve quantification methods. Using the B-spline structure, smooth fab...
work page 2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.