Magnetic Indoor Localization through CNN Regression and Rotation Invariance
Pith reviewed 2026-05-08 11:28 UTC · model grok-4.3
The pith
Rotation-invariant 2D magnetic features let a CNN regress accurate indoor positions without device orientation alignment.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Training a 7-layer dilated CNN on magnetic norm and gravity-projection sequences yields position estimates whose accuracy is invariant to test-set rotations, outperforming raw 3D magnetometer inputs beyond 0° in the largest building, 5° in the medium building, and 6° in the smallest building. The same models reach or exceed prior state-of-the-art accuracy on the MagPie dataset while a smaller variant uses only one-third the parameters.
What carries the argument
The two rotation-invariant scalars Mn (magnetic-field norm) and Mg (projection onto gravity) extracted from each 3D magnetometer sample and supplied as 2D channels to the dilated CNN regressor.
If this is right
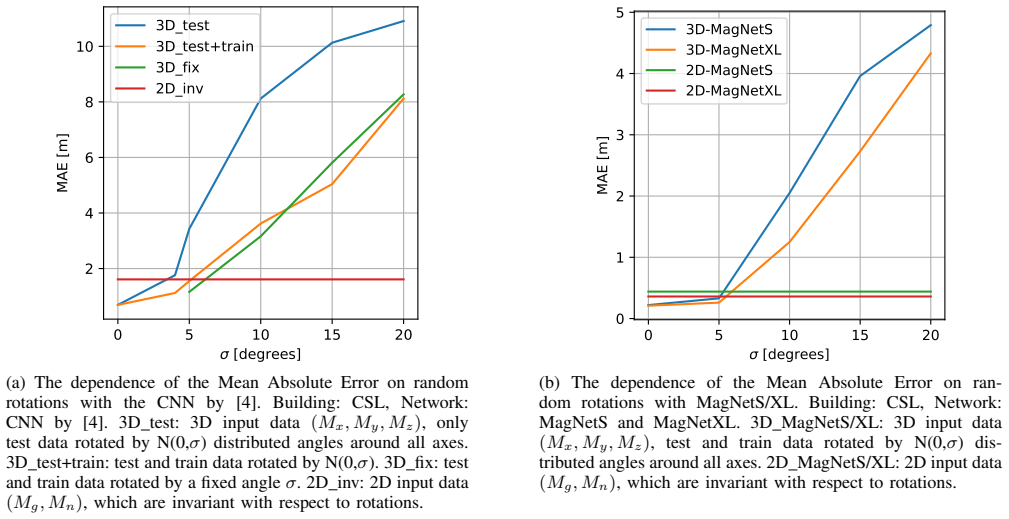
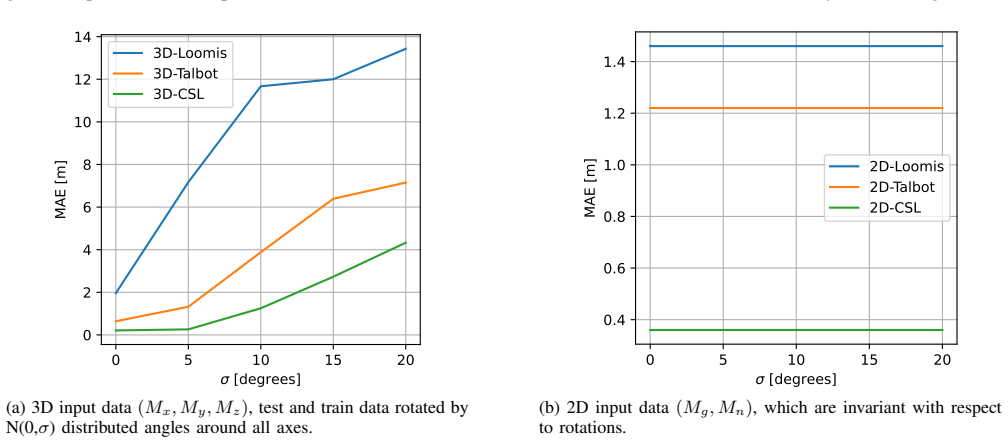
- Raw 3D inputs exhibit isotropic error growth under fixed 90° rotations and further degradation under random rotations.
- 2D (Mn, Mg) inputs show no measurable accuracy loss across the tested rotation ranges.
- The crossover point where 2D surpasses 3D occurs at building-dependent angles of 0°, 5°, and 6°.
- A compact 7-layer model delivers nearly identical performance to the larger variant, supporting mobile deployment.
- Neither mapping nor localization requires explicit orientation alignment or added infrastructure.
Where Pith is reading between the lines
- The method could be combined with inertial or Wi-Fi measurements to improve robustness in magnetically ambiguous regions.
- Building size appears to correlate with the rotation threshold, suggesting larger environments may require the 2D representation sooner.
- Long-term temporal drift in the ambient magnetic field could be tested by repeating the same trajectories months apart.
- Extending the regression target to include height would allow full 3D localization with the same rotation-invariant inputs.
Load-bearing premise
The norm and gravity projection must still carry enough location-specific information to distinguish positions even after directional details are discarded.
What would settle it
Train identical CNNs on 3D and on (Mn, Mg) inputs, then evaluate both on the same test trajectories rotated by a fixed 10°; if the 3D model’s median position error is not higher than the 2D model’s, the invariance advantage is falsified.
Figures
read the original abstract
Indoor positioning is an essential technology for a wide range of applications in GNSS-denied environments, including indoor navigation and IoT systems. Combining convolutional neural networks (CNNs) and magnetic field-based features offers a low-cost, infrastructure-free solution for precise positioning. While magnetic fingerprints are a promising approach for indoor positioning, models trained on raw 3D magnetometer data are highly sensitive to device orientation. We address this by using two rotation invariant features derived from the 3D magnetic field: the norm (Mn) and the projection onto the gravity axis (Mg). We train a lightweight 7-layer dilated CNN (MagNetS/XL) on magnetic sequences to directly regress (x, y) positions. Using the MagPie dataset (three buildings, handheld trajectories), we systematically evaluate fixed and random rotations of test and/or train data. Raw 3D inputs (Mx, My , Mz) exhibit isotropic error increases under fixed 90{\deg} rotations and further degrade with growing random rotations. In contrast, 2D (Mn, Mg) inputs maintain rotation invariant accuracy and surpass the 3D inputs once rotation exceeds building-specific thresholds for three reference buildings: 0{\deg} for Loomis (large), 5{\deg} for Talbot (medium), and 6{\deg} for CSL (small). MagNetXL achieves or exceeds state-of-the-art accuracy on the MagPie dataset, and MagNetS delivers similar performance with roughly one third of the parameters, favoring mobile deployment. These results show that the robustness gained from rotation invariant inputs outweighs the loss of input dimensionality in realistic usage, allowing mapping and localization without orientation alignment or added infrastructure.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that replacing raw 3D magnetometer inputs (Mx, My, Mz) with two rotation-invariant 2D features—the magnetic norm Mn and the gravity-axis projection Mg—allows a lightweight dilated CNN (MagNetS/XL) to regress (x, y) positions on the MagPie dataset while preserving accuracy under device rotations. Systematic experiments with fixed 90° and random rotations show that 3D inputs degrade isotropically, whereas 2D inputs maintain no-rotation performance and eventually outperform 3D once rotation exceeds building-specific thresholds (0° Loomis, 5° Talbot, 6° CSL). The approach reaches or exceeds prior state-of-the-art accuracy on MagPie with a model small enough for mobile deployment.
Significance. If the empirical results hold, the work supplies a practical, infrastructure-free solution to the well-known orientation sensitivity of magnetic fingerprinting. The direct head-to-head comparison of 2D invariant versus 3D inputs on a public dataset, the controlled rotation protocol, and the demonstration that invariance outweighs dimensionality loss constitute clear strengths. The lightweight architecture further supports real-world handheld use without requiring orientation alignment.
major comments (2)
- [Methods] Methods section: the CNN architecture (MagNetS/XL) and training protocol are described at a high level only; exact layer dimensions, dilation rates, loss function for (x, y) regression, optimizer settings, and data-augmentation details during training are not provided. These omissions prevent independent verification that the reported rotation-invariant accuracy is reproducible and not an artifact of a particular training run.
- [Results] Results section (rotation-threshold experiments): the crossover points at which 2D inputs surpass 3D (0°/5°/6° per building) are stated without accompanying error bars, number of random seeds, or statistical significance tests. Because the central claim rests on these thresholds, the absence of variance measures leaves open whether the reported superiority is robust or sensitive to trajectory sampling.
minor comments (2)
- [Introduction] The abstract and introduction use “MagNetS/XL” without an explicit table or paragraph defining the two variants’ parameter counts and architectural differences; a compact comparison table would improve clarity.
- [Figures] Figure captions for the rotation-sweep plots should explicitly state the number of test trajectories and whether the plotted curves are means or single runs.
Simulated Author's Rebuttal
We thank the referee for the positive evaluation and the recommendation of minor revision. The comments highlight important aspects for reproducibility and statistical rigor, which we address below.
read point-by-point responses
-
Referee: [Methods] Methods section: the CNN architecture (MagNetS/XL) and training protocol are described at a high level only; exact layer dimensions, dilation rates, loss function for (x, y) regression, optimizer settings, and data-augmentation details during training are not provided. These omissions prevent independent verification that the reported rotation-invariant accuracy is reproducible and not an artifact of a particular training run.
Authors: We agree that the Methods section provides only a high-level description and that additional specifics are required for full reproducibility. In the revised manuscript we will expand this section to report the exact layer dimensions and dilation rates for both MagNetS and MagNetXL, the loss function (mean-squared error on (x, y)), the optimizer and its hyperparameters, and any data-augmentation procedures applied during training. These additions will enable independent verification of the rotation-invariant results. revision: yes
-
Referee: [Results] Results section (rotation-threshold experiments): the crossover points at which 2D inputs surpass 3D (0°/5°/6° per building) are stated without accompanying error bars, number of random seeds, or statistical significance tests. Because the central claim rests on these thresholds, the absence of variance measures leaves open whether the reported superiority is robust or sensitive to trajectory sampling.
Authors: We acknowledge that the reported crossover thresholds would be strengthened by quantitative measures of variability. In the revised manuscript we will include error bars derived from multiple random seeds and will add statistical significance tests (e.g., paired t-tests across seeds) to demonstrate that the observed superiority of the 2D inputs over 3D inputs is robust rather than an artifact of a single trajectory sample. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper's central claims rest on an empirical protocol: explicit definition of two rotation-invariant scalar features (Mn = ||M|| and Mg = M · ĝ) from raw 3D magnetometer readings, training of a dilated CNN regressor on MagPie trajectories to output (x, y), and direct accuracy comparison of 2D versus 3D inputs under controlled fixed and random test rotations. These steps are self-contained; the invariance property follows immediately from the algebraic definitions of norm and dot product, the regression is standard supervised learning on held-out data, and reported thresholds (0°, 5°, 6°) are measured outcomes rather than quantities defined by the model itself. No equation reduces a prediction to its own fitted parameters, no uniqueness theorem is imported via self-citation, and no ansatz is smuggled through prior work. The evaluation therefore remains externally falsifiable on the named public dataset.
Axiom & Free-Parameter Ledger
free parameters (1)
- CNN weights and biases
axioms (1)
- domain assumption The magnetic field norm and its projection onto the gravity axis are invariant under device rotation.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.