Finite-time transitions in optimal control and non-equilibrium relaxation
Pith reviewed 2026-05-07 14:33 UTC · model grok-4.3
The pith
Optimal control of a colloidal particle switches strategy abruptly when available time falls below a critical value due to competing costs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
In finite-time optimal control of a colloidal particle subject to a position-dependent final-state energetic cost, the competition with path-dependent dissipation produces a sharp transition in the optimal strategy at a critical control duration; this transition is identical to a dynamical phase transition in nonequilibrium relaxation after a quench, with the minimal control cost mapping directly onto the large-deviation rate function for rare trajectories.
What carries the argument
The mapping between the optimal-control cost and the large-deviation rate function that governs rare trajectories in nonequilibrium relaxation after a quench.
If this is right
- Below the critical duration the optimal path jumps from one class of trajectories to another.
- The transition point can be predicted from the rate function of the quench relaxation without solving the control problem separately.
- Experimental colloidal trajectories should display the same discontinuous switch in steering strategy.
- The equivalence holds for any system whose dissipation and final-state cost obey the same additive structure.
Where Pith is reading between the lines
- The same cost-competition mechanism may produce sharp transitions in other finite-time driving problems such as molecular motors or microfluidic mixers.
- Measuring the rate function from rare-event statistics could give a shortcut to finding minimal-cost control protocols.
- The mapping suggests that dynamical phase transitions in relaxation could be used to design robust finite-time protocols in driven systems.
Load-bearing premise
The final-state energetic cost can be added independently to the path dissipation so that their competition creates a genuine sharp transition, and the control cost equals the large-deviation rate function without extra approximations.
What would settle it
Plot the minimal control cost versus allowed duration and check whether a kink appears exactly at the duration where the large-deviation rate function for the corresponding quenched relaxation changes its slope or analytic form.
Figures


read the original abstract
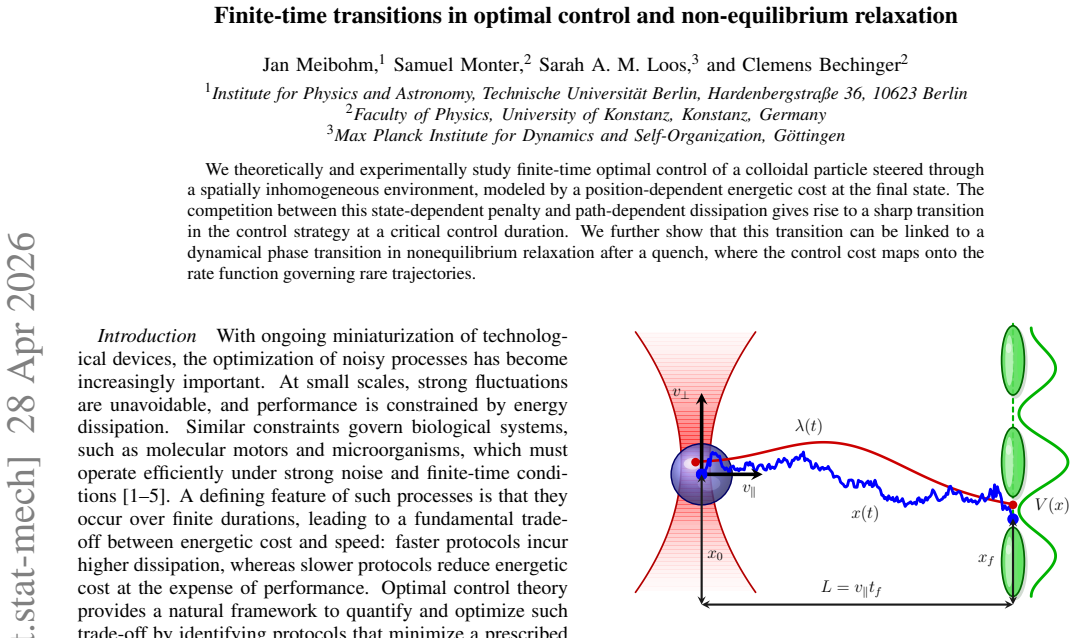
We theoretically and experimentally study finite-time optimal control of a colloidal particle steered through a spatially inhomogeneous environment, modeled by a position-dependent energetic cost at the final state. The competition between this state-dependent penalty and path-dependent dissipation gives rise to a sharp transition in the control strategy at a critical control duration. We further show that this transition can be linked to a dynamical phase transition in nonequilibrium relaxation after a quench, where the control cost maps onto the rate function governing rare trajectories.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript theoretically and experimentally studies finite-time optimal control of a colloidal particle in a spatially inhomogeneous environment, imposing a position-dependent energetic cost at the final state. The authors claim that competition between this state-dependent penalty and path-dependent dissipation produces a sharp transition in the optimal control strategy at a critical control duration. They further assert that this transition links to a dynamical phase transition in nonequilibrium relaxation after a quench, with the minimal control cost mapping exactly onto the large-deviation rate function governing rare trajectories.
Significance. If the mapping between optimal-control cost and the large-deviation rate function is shown to be exact (without hidden approximations, boundary mismatches, or stochastic-calculus artifacts), the work would establish a concrete bridge between finite-time optimal control and dynamical phase transitions in non-equilibrium statistical mechanics. Experimental validation in a colloidal system would add practical value by offering a controllable platform to probe rare-event statistics via control protocols. The result could influence studies of driven systems where control costs serve as proxies for rate functions.
major comments (1)
- [Abstract] Abstract: the central claim that 'the control cost maps onto the rate function governing rare trajectories' is load-bearing for both the dynamical-phase-transition link and the sharpness of the finite-time transition. The manuscript must explicitly derive or verify that (i) the position-dependent final-state energetic cost is precisely the observable whose probability is governed by the rate function, (ii) the path dissipation reproduces the exact action functional of the underlying Langevin dynamics, and (iii) no Itô corrections, discretization artifacts, or multiplicative-noise terms alter the identification. Without these steps shown, the asserted exact mapping remains unconfirmed and the transition may be approximate rather than sharp.
minor comments (1)
- [Abstract] The abstract states that both theory and experiment support the claims but supplies no equations, data, error bars, or description of how the mapping was verified. The main text should include these details (e.g., explicit optimal-control Hamiltonian, numerical or analytic solution for the critical duration, and experimental trajectory statistics) to allow independent assessment.
Simulated Author's Rebuttal
We thank the referee for the careful reading and for emphasizing the necessity of rigorously confirming the exactness of the mapping between optimal-control cost and the large-deviation rate function. This point is central to the claimed link with dynamical phase transitions, and we address it directly below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that 'the control cost maps onto the rate function governing rare trajectories' is load-bearing for both the dynamical-phase-transition link and the sharpness of the finite-time transition. The manuscript must explicitly derive or verify that (i) the position-dependent final-state energetic cost is precisely the observable whose probability is governed by the rate function, (ii) the path dissipation reproduces the exact action functional of the underlying Langevin dynamics, and (iii) no Itô corrections, discretization artifacts, or multiplicative-noise terms alter the identification. Without these steps shown, the asserted exact mapping remains unconfirmed and the transition may be approximate rather than sharp.
Authors: We agree that an explicit verification is required to establish the mapping without ambiguity. In the current manuscript the final-state cost is defined as the position-dependent observable whose probability satisfies the large-deviation principle with rate function I(x), and the control cost is obtained from the path-integral representation of the overdamped Langevin equation whose dissipation term is precisely the Onsager-Machlup action. Because the diffusion coefficient is constant (additive noise), the stochastic integral is interpreted in the Itô sense with no additional correction terms or multiplicative-noise contributions; the continuous-time limit eliminates discretization artifacts. Nevertheless, these identifications are only sketched in the main text and detailed in the supplement. We will add a dedicated subsection (new Section 3.2) in the revised manuscript that derives the mapping step by step, explicitly confirming points (i)–(iii) with the stochastic-calculus conventions used. revision: yes
Circularity Check
No significant circularity; derivation remains self-contained
full rationale
The abstract and provided context present the finite-time transition as emerging from explicit competition between an independent state-dependent final penalty and path dissipation, with the link to the large-deviation rate function described as a derived mapping rather than an identity imposed by definition or fitting. No load-bearing step reduces the central claim to a self-referential fit, renamed ansatz, or self-citation chain; the modeling choices (additive cost terms, optimal-control formulation) retain independent physical content that can be checked against external benchmarks or experiments. The reader's preliminary assessment of score 2 is consistent with this finding of at most minor self-citation that is not load-bearing.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Overdamped Langevin equation governs the colloidal particle motion
- domain assumption Final-state energetic cost is an additive, position-dependent term independent of the path taken
Reference graph
Works this paper leans on
-
[1]
Y . Chi, Y . Zhao, Y . Hong, Y . Li, and J. Yin, A perspective on miniature soft robotics: Actuation, fabrication, control, and ap- plications, Adv. Intell. Syst.6, 2300063 (2024)
work page 2024
-
[2]
X. Ju, C. Chen, C. M. Oral, S. Sevim, R. Golestanian, M. Sun, N. Bouzari, X. Lin, M. Urso, J. S. Nam, and Others, Technology Roadmap of Micro/Nanorobots, ACS Nano19, 24174 (2025)
work page 2025
-
[3]
J. Howard,Mechanics of motor proteins and the cytoskeleton (Sinauer Press, Sunderland, Massachusetts, 2001)
work page 2001
-
[4]
F. Jülicher, A. Ajdari, and J. Prost, Modeling molecular motors, Rev. Mod. Phys.69, 1269 (1997)
work page 1997
-
[5]
N. Soga, K. Kimura, K. Kinosita Jr, M. Yoshida, and T. Suzuki, Perfect chemomechanical coupling of FoF1-ATP synthase, Proc. Natl. Acad. Sci.114, 4960 (2017)
work page 2017
-
[6]
W. Fleming and R. Rishel,Deterministic and Stochastic Opti- mal Control, 1st ed. (Springer, New York, 1975)
work page 1975
-
[7]
Bechhoefer,Control theory for physicists(Cambridge Uni- versity Press, 2021)
J. Bechhoefer,Control theory for physicists(Cambridge Uni- versity Press, 2021)
work page 2021
-
[8]
J. Alvarado, E. G. Teich, D. A. Sivak, and J. Bechhoefer, Op- timal control in soft and active matter, Annu. Rev. Condens. Matter Phys.17(2025)
work page 2025
-
[9]
T. Schmiedl and U. Seifert, Optimal finite-time processes in stochastic thermodynamics, Phys. Rev. Lett.98, 108301 (2007)
work page 2007
-
[10]
S. A. M. Loos, S. Monter, F. Ginot, and C. Bechinger, Universal symmetry of optimal control at the microscale, Phys. Rev. X14, 021032 (2024)
work page 2024
-
[11]
S. Colabrese, K. Gustavsson, A. Celani, and L. Biferale, Flow navigation by smart microswimmers via reinforcement learn- ing, Phys. Rev. Lett.118, 158004 (2017)
work page 2017
-
[12]
R. Garcia-Millan, J. Schüttler, M. E. Cates, and S. A. M. Loos, Optimal closed-loop control of active particles and a minimal information engine, Phys. Rev. Lett.135, 88301 (2025)
work page 2025
- [13]
-
[14]
H. J. Kappen, Linear theory for control of nonlinear stochastic systems, Phys. Rev. Lett.95, 200201 (2005)
work page 2005
-
[15]
H. J. Kappen, Path integrals and symmetry breaking for optimal control theory, J. Stat. Mech.2005, P11011 (2005)
work page 2005
-
[16]
W. H. Fleming,Controlled Markov processes and viscosity so- lutions(Springer)
-
[17]
Touchette, The large deviation approach to statistical me- chanics, Phys
H. Touchette, The large deviation approach to statistical me- chanics, Phys. Rep.478, 1 (2009)
work page 2009
-
[18]
R. Chetrite and H. Touchette, Variational and optimal control representations of conditioned and driven processes, J. Stat. Mech.2015, P12001 (2015)
work page 2015
-
[19]
J. Meibohm and M. Esposito, Finite-Time Dynamical Phase Transition in Nonequilibrium Relaxation, Phys. Rev. Lett.128, 110603 (2022)
work page 2022
-
[20]
K. Blom and A. Godec, Global Speed Limit for Finite-Time Dynamical Phase Transition in Nonequilibrium Relaxation, arXiv:2209.14287 10.48550/arXiv.2209.14287 (2022)
-
[21]
J. Meibohm and M. Esposito, Landau theory for finite-time dy- namical phase transitions, New J. Phys.25, 023034 (2023)
work page 2023
-
[22]
N. Vadakkayil, M. Esposito, and J. Meibohm, Critical fluctua- tions at a finite-time dynamical phase transition, Phys. Rev. E 110, 064156 (2024)
work page 2024
-
[23]
J. Meibohm, S. Monter, C. Bechinger, and S. A. M. Loos, Com- panion paper to this Letter (in preparation)
-
[24]
Seifert, Stochastic thermodynamics, fluctuation theorems and molecular machines, Reports Prog
U. Seifert, Stochastic thermodynamics, fluctuation theorems and molecular machines, Reports Prog. Phys.75, 126001 (2012)
work page 2012
-
[25]
L. Peliti and S. Pigolotti,Stochastic Thermodynamics: An In- troduction(Princeton University Press, Princeton, NJ, 2021)
work page 2021
-
[26]
See the Appendix for derivations of the optimal protocol, the cost function and the critical time, and for details on the exper- imental methods
-
[27]
P. M. Chaikin, T. C. Lubensky, and T. A. Witten,Principles of condensed matter physics, V ol. 10 (Cambridge University Press, Cambridge, 1995)
work page 1995
-
[28]
A. van Enter, R. Fernández, F. den Hollander, and F. Redig, Pos- sible Loss and Recovery of Gibbsianness During the Stochastic Evolution of Gibbs Measures, Commun. Math. Phys.226, 101 (2002)
work page 2002
-
[29]
C. Külske and A. Le Ny, Spin-flip dynamics of the Curie-Weiss model: Loss of Gibbsianness with possibly broken symmetry, Commun. Math. Phys.271, 431 (2007)
work page 2007
-
[30]
V . Ermolaev and C. Külske, Low-temperature dynamics of the Curie-Weiss model: Periodic orbits, multiple histories, and loss of Gibbsianness, J. Stat. Phys.141, 727 (2010)
work page 2010
-
[31]
J. A. Bucklew,Introduction to rare event simulation, V ol. 5 (Springer, 2004)
work page 2004
- [32]
-
[33]
G. E. Crooks, Nonequilibrium measurements of free energy dif- ferences for microscopically reversible Markovian systems, J. Stat. Phys.90, 1481 (1998). 6 APPENDICES Appendix A: Noise-averaged potential In this section, we derive the noise-averaged potential ˜V(u f )from the bare potentialV(x). Due to the linear Langevin dynamics [Eq. (1) in the main text]...
work page 1998
-
[34]
Optical tweezers setup A 532 nm laser (Coherent Verdi V2) is used as the coher- ent light source for the optical tweezers setup. The beam intensity can be modulated and its angle deflected using an acousto-optic deflector (AOD, AA Opto-Electronic DTSXY- 400). A telescope composed of 2 inch lenses directs the de- flected beam to the back aperture of the mi...
-
[35]
Measurement Procedures a. Optimal Control Experiment After trapping a particle near the midplane of the sample cell (to avoid wall-interactions) a calibration measurement is performed as described in E 1. To test the optimal control pro- tocols for varying initial positionsu 0 and protocol durations t f , the trap centerλ(t)is moved according to the corre...
-
[36]
=0.04 s defined by the acquisition rate of the camera. b. Free relaxation experiment and reweighting For the relaxation experiments, we first localized a single particle in the optical trap. We then repeatedly turned the trap on and off for time periodston =t off =0.5s, respectively. Dur- ing the “off” time, we observed free diffusion of the particle with...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.