Camera-RFID Fusion for Robust Asset Tracking in Forested Environments
Pith reviewed 2026-05-07 13:48 UTC · model grok-4.3
The pith
Fusing camera vision with RFID tags bridges the meter-to-centimeter accuracy gap for reliable asset tracking in forests.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that a novel camera-RFID fusion framework integrating depth and object information with advanced trajectory-matching algorithms successfully bridges the meter-to-centimeter accuracy gap, achieving reliable tag localization even when assets temporarily leave the camera's field of view, and represents the first such application for asset tracking in natural forested environments.
What carries the argument
The camera-RFID fusion framework that associates meter-scale RFID trajectories with centimeter-scale camera trajectories using depth information, object detection, and trajectory-matching algorithms.
If this is right
- Assets remain trackable in dense forests where vision alone loses them to occlusions.
- RFID supplies non-line-of-sight identification while vision supplies the needed spatial precision.
- Localization accuracy holds when assets move outside the immediate camera field of view.
- The approach scales to many passive tags without requiring line-of-sight to every item at all times.
Where Pith is reading between the lines
- The same trajectory-matching idea could extend to other mixed-signal environments such as indoor warehouses with shelves.
- Adding a third modality like acoustic sensors might further reduce association errors in very thick vegetation.
- If the matching algorithms are made faster, the system could support real-time alerts for asset movement.
- Field tests across different tree densities would show whether forest type changes the required matching tolerance.
Load-bearing premise
Advanced trajectory-matching algorithms can reliably associate the meter-scale RFID trajectories with centimeter-scale camera trajectories despite signal attenuation, multipath effects, and partial occlusions in dense forest settings.
What would settle it
A controlled test in a dense forest where known asset paths are recorded with both sensors and the fusion system fails to produce correct continuous tracks once assets exit the camera view for more than a few seconds.
Figures








read the original abstract
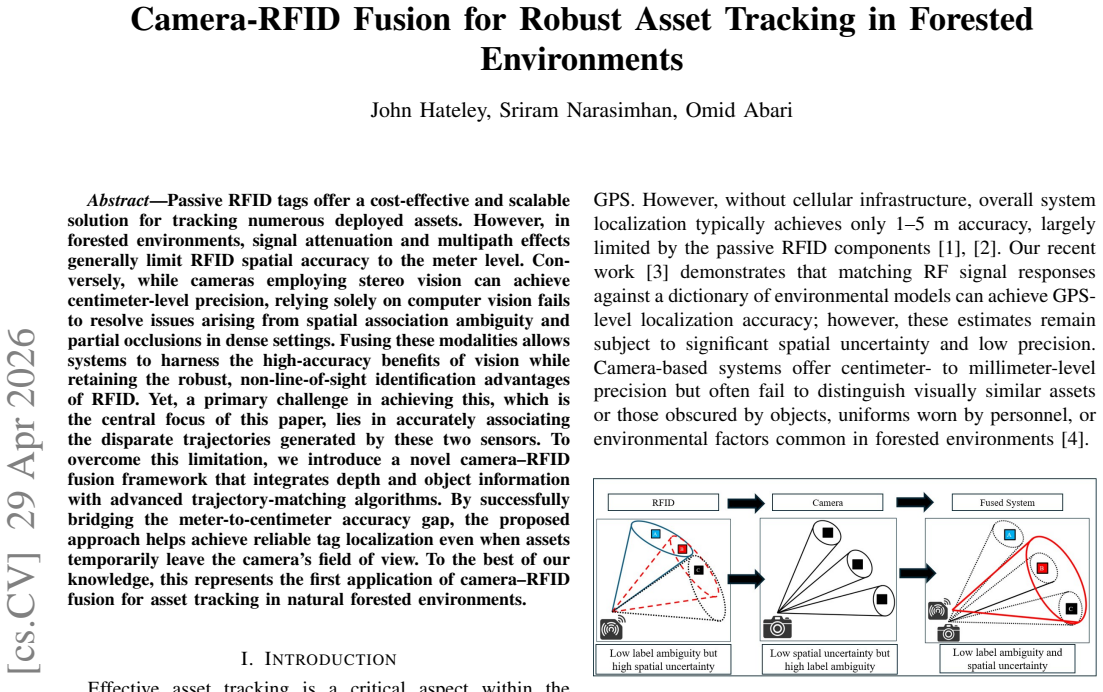
Passive RFID tags offer a cost-effective and scalable solution for tracking numerous deployed assets. However, in forested environments, signal attenuation and multipath effects generally limit RFID spatial accuracy to the meter level. Conversely, while cameras employing stereo vision can achieve centimeter-level precision, relying solely on computer vision fails to resolve issues arising from spatial association ambiguity and partial occlusions in dense settings. Fusing these modalities allows systems to harness the high-accuracy benefits of vision while retaining the robust, non-line-of-sight identification advantages of RFID. Yet, a primary challenge in achieving this, which is the central focus of this paper, lies in accurately associating the disparate trajectories generated by these two sensors. To overcome this limitation, we introduce a novel camera--RFID fusion framework that integrates depth and object information with advanced trajectory-matching algorithms. By successfully bridging the meter-to-centimeter accuracy gap, the proposed approach helps achieve reliable tag localization even when assets temporarily leave the camera's field of view. To the best of our knowledge, this represents the first application of camera--RFID fusion for asset tracking in natural forested environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a camera-RFID fusion framework for asset tracking in forested environments. It identifies the meter-scale accuracy limits of passive RFID due to attenuation and multipath, contrasts this with the centimeter-scale potential of stereo cameras limited by association ambiguity and occlusions, and introduces a fusion approach that integrates depth/object information with advanced trajectory-matching algorithms to associate the two modalities. The central claim is that this enables reliable tag localization even when assets temporarily exit the camera FOV, representing the first such application in natural forested settings.
Significance. If the trajectory association proves robust, the work could enable practical, scalable asset monitoring systems that combine RFID's non-line-of-sight identification with vision's precision, addressing a real gap in outdoor environmental and logistics applications where single-modality approaches fail.
major comments (2)
- [Abstract] The abstract states that the framework 'successfully bridging the meter-to-centimeter accuracy gap' via 'advanced trajectory-matching algorithms,' yet the manuscript provides no equations, pseudocode, or algorithmic description of the matching process, nor any quantitative association metrics (e.g., precision-recall under varying occlusion or multipath levels). This is load-bearing for the central claim, as the skeptic note correctly identifies: without demonstrated robustness of the association step, the fusion cannot deliver reliable localization once assets leave the FOV.
- [Abstract / Proposed Framework] No experimental section, validation datasets, error metrics, or ablation studies on forest-specific challenges (signal attenuation, multipath, partial occlusions) are present to support the accuracy claims or the 'first application' novelty assertion. The soundness assessment of 3.0 is warranted; the framework remains conceptual until such evidence is supplied.
minor comments (1)
- [Abstract] Clarify the exact role of depth and object information in the trajectory-matching step to avoid ambiguity in how the modalities are integrated.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback, which highlights important gaps in the presentation of our framework. We address each major comment below and have prepared a revised manuscript that incorporates the requested details and evidence.
read point-by-point responses
-
Referee: [Abstract] The abstract states that the framework 'successfully bridging the meter-to-centimeter accuracy gap' via 'advanced trajectory-matching algorithms,' yet the manuscript provides no equations, pseudocode, or algorithmic description of the matching process, nor any quantitative association metrics (e.g., precision-recall under varying occlusion or multipath levels). This is load-bearing for the central claim, as the skeptic note correctly identifies: without demonstrated robustness of the association step, the fusion cannot deliver reliable localization once assets leave the FOV.
Authors: We agree that the original abstract and manuscript text did not provide sufficient algorithmic detail to substantiate the trajectory-matching component. In the revision, we have added a dedicated subsection (now Section 3.2) containing the full mathematical formulation of the association cost function, the optimization objective for trajectory matching, pseudocode for the matching algorithm, and quantitative association metrics (precision, recall, and F1-score) evaluated under controlled variations in occlusion duration and multipath intensity. These additions directly address the load-bearing concern by showing that the matching step remains reliable even when camera observations are temporarily unavailable. revision: yes
-
Referee: [Abstract / Proposed Framework] No experimental section, validation datasets, error metrics, or ablation studies on forest-specific challenges (signal attenuation, multipath, partial occlusions) are present to support the accuracy claims or the 'first application' novelty assertion. The soundness assessment of 3.0 is warranted; the framework remains conceptual until such evidence is supplied.
Authors: We acknowledge that the initial submission omitted a full experimental validation section, leaving the accuracy and novelty claims without direct empirical support. The revised manuscript now includes a new Section 5 with (i) a description of the collected forest dataset (including ground-truth references), (ii) quantitative localization error metrics (mean and median Euclidean error in cm) comparing fused vs. single-modality performance, (iii) ablation studies isolating the impact of signal attenuation, multipath, and partial occlusions, and (iv) a literature comparison table establishing the novelty relative to prior indoor or non-forested camera-RFID work. These additions convert the framework from conceptual to empirically grounded. revision: yes
Circularity Check
No significant circularity: framework proposal lacks derivations, fits, or self-referential reductions
full rationale
The paper presents a systems-level proposal for camera-RFID fusion in forested asset tracking, centered on integrating depth/object data with trajectory-matching algorithms to bridge meter-to-centimeter accuracy. The abstract and context describe this as a novel integration without any equations, parameter fits, predictions derived from subsets of data, or load-bearing self-citations. No derivation chain exists that reduces outputs to inputs by construction; the central claim rests on the proposed framework's ability to handle association challenges, which is presented as an engineering contribution rather than a self-referential mathematical result. This qualifies as a self-contained systems paper with no circularity patterns from the enumerated list.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Review on uhf rfid localization methods,
C. Li, L. Mo, and D. Zhang, “Review on uhf rfid localization methods,” IEEE Journal of Radio Frequency Identification, vol. 3, no. 4, pp. 205– 215, 2019
work page 2019
-
[2]
S. M. Asaad and H. S. Maghdid, “A comprehensive review of indoor/outdoor localization solutions in iot era: Research challenges and future perspectives,”Computer Net- works, vol. 212, p. 109041, 2022. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S1389128622001918
work page 2022
-
[3]
Tracking wildfire assets with commodity rfid and gaussian process modeling,
J. Hateley, S. Narasimhan, and O. Abari, “Tracking wildfire assets with commodity rfid and gaussian process modeling,”IEEE Journal of Radio Frequency Identification, vol. 9, pp. 998–1008, 2025
work page 2025
-
[4]
Depth camera based indoor mobile robot localization and navigation,
J. Biswas and M. Veloso, “Depth camera based indoor mobile robot localization and navigation,” in2012 IEEE International Conference on Robotics and Automation, 2012, pp. 1697–1702
work page 2012
-
[5]
Orientation-aware rfid tracking with centimeter-level accuracy,
C. Jiang, Y . He, X. Zheng, and Y . Liu, “Orientation-aware rfid tracking with centimeter-level accuracy,” in2018 17th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN). IEEE, 2018, pp. 290–301
work page 2018
-
[6]
Localization of rfid tags for environmental monitoring using uav,
G. Greco, C. Lucianaz, S. Bertoldo, and M. Allegretti, “Localization of rfid tags for environmental monitoring using uav,” in2015 IEEE 1st International Forum on Research and Technologies for Society and Industry Leveraging a better tomorrow (RTSI), 2015, pp. 480–483
work page 2015
-
[7]
Robotic grasping of fully-occluded objects using rf perception,
T. Boroushaki, J. Leng, I. Clester, A. Rodriguez, and F. Adib, “Robotic grasping of fully-occluded objects using rf perception,” in2021 IEEE International Conference on Robotics and Automation (ICRA), 2021, pp. 923–929
work page 2021
-
[8]
Outdoor uhf rfid: Phase stabilization for real-world applications,
M. Le Breton, L. Baillet, E. Larose, E. Rey, P. Benech, D. Jongmans, and F. Guyoton, “Outdoor uhf rfid: Phase stabilization for real-world applications,”IEEE Journal of Radio Frequency Identification, vol. 1, no. 4, pp. 279–290, 2017
work page 2017
-
[9]
Repos: Relative position estimation of uhf-rfid tags for item- level localization,
C. Li, E. Tanghe, D. Plets, P. Suanet, J. Hoebeke, E. D. Poorter, and W. Joseph, “Repos: Relative position estimation of uhf-rfid tags for item- level localization,” in2019 IEEE International Conference on RFID Technology and Applications (RFID-TA), 2019, pp. 357–361
work page 2019
-
[10]
A review of radio frequency fingerprinting techniques,
N. Soltanieh, Y . Norouzi, Y . Yang, and N. C. Karmakar, “A review of radio frequency fingerprinting techniques,”IEEE Journal of Radio Frequency Identification, vol. 4, no. 3, pp. 222–233, 2020
work page 2020
-
[11]
An rfid-based mobile robot localization method combining phase difference and readability,
B. Tao, H. Wu, Z. Gong, Z. Yin, and H. Ding, “An rfid-based mobile robot localization method combining phase difference and readability,” IEEE Transactions on Automation Science and Engineering, vol. 18, no. 3, pp. 1406–1416, 2021
work page 2021
-
[12]
Robotic inventorying and localization of rfid tags, exploiting phase-fingerprinting,
S. Siachalou, S. Megalou, A. Tzitzis, E. Tsardoulias, A. Bletsas, J. Sahalos, T. Yioultsis, and A. G. Dimitriou, “Robotic inventorying and localization of rfid tags, exploiting phase-fingerprinting,” in2019 IEEE International Conference on RFID Technology and Applications (RFID-TA), 2019, pp. 362–367
work page 2019
-
[13]
Computing the fr ´echet distance between two polygonal curves,
H. Alt and M. Godau, “Computing the fr ´echet distance between two polygonal curves,”International Journal of Computational Geometry & Applications, vol. 5, no. 01n02, pp. 75–91, 1995
work page 1995
-
[14]
Edit distance-based trajectory similarity com- putation,
L. Chen and R. T. Yu, “Edit distance-based trajectory similarity com- putation,” inProceedings of the 13th ACM international symposium on Advances in geographic information systems. ACM, 2005, pp. 123–132
work page 2005
-
[15]
Discovering similar multi- dimensional trajectories,
M. Vlachos, G. Kollios, and D. Gunopulos, “Discovering similar multi- dimensional trajectories,” inProceedings 18th International Conference on Data Engineering. IEEE, 2002, pp. 673–684
work page 2002
-
[16]
Efficient similarity search in sequence databases,
R. Agrawal, C. Faloutsos, and A. Swami, “Efficient similarity search in sequence databases,” inInternational conference on foundations of data organization and algorithms. Springer, 1993, pp. 69–84
work page 1993
-
[17]
Dynamic programming algorithm optimization for spoken word recognition,
H. Sakoe and S. Chiba, “Dynamic programming algorithm optimization for spoken word recognition,”IEEE Transactions on Acoustics, Speech, and Signal Processing, vol. 26, no. 1, pp. 43–49, 1978
work page 1978
-
[18]
Algo- rithms for matching and predicting trajectories,
J. Eisner, S. Funke, A. Herbst, A. Spillner, and S. Storandt, “Algo- rithms for matching and predicting trajectories,” in2011 Proceedings of the thirteenth workshop on Algorithm Engineering and Experiments (ALENEX). SIAM, 2011, pp. 84–95
work page 2011
-
[19]
Trajectory similarity measures,
K. Toohey and M. Duckham, “Trajectory similarity measures,”Sigspa- tial Special, vol. 7, no. 1, pp. 43–50, 2015
work page 2015
-
[20]
A comparative analysis of trajectory similarity measures,
Y . Tao, A. Both, R. I. Silveira, K. Buchin, S. Sijben, R. S. Purves, P. Laube, D. Peng, K. Toohey, and M. Duckham, “A comparative analysis of trajectory similarity measures,”GIScience & Remote Sensing, vol. 58, no. 5, pp. 643–669, 2021
work page 2021
-
[21]
Distributed trajectory similarity search,
D. Xie, F. Li, and J. M. Phillips, “Distributed trajectory similarity search,”Proc. VLDB Endow., vol. 10, no. 11, p. 1478–1489, Aug
-
[22]
Available: https://doi.org/10.14778/3137628.3137655
[Online]. Available: https://doi.org/10.14778/3137628.3137655
-
[23]
From driving trajectories to driving paths: A survey on map-matching algorithms,
L. Jiang, C. Chen, C. Chen, H. Huang, and B. Guo, “From driving trajectories to driving paths: A survey on map-matching algorithms,” CCF Transactions on Pervasive Computing and Interaction, vol. 4, no. 3, p. 252–267, May 2022
work page 2022
-
[24]
Computing the fr ´echet distance between uncertain curves in one dimension,
K. Buchin, M. L ¨offler, T. Ophelders, A. Popov, J. Urhausen, and K. Verbeek, “Computing the fr ´echet distance between uncertain curves in one dimension,”Computational Geometry, vol. 109, p. 101923, 2023
work page 2023
-
[25]
Decision making under model uncertainty: Fr ´echet–wasserstein mean prefer- ences,
E. V . Petracou, A. Xepapadeas, and A. N. Yannacopoulos, “Decision making under model uncertainty: Fr ´echet–wasserstein mean prefer- ences,”Management Science, vol. 68, no. 2, pp. 1195–1211, 2022
work page 2022
-
[26]
Review on trajectory similarity measures,
N. Magdy, M. A. Sakr, T. Mostafa, and K. El-Bahnasy, “Review on trajectory similarity measures,” in2015 IEEE seventh international conference on Intelligent Computing and Information Systems (ICICIS). IEEE, 2015, pp. 613–619
work page 2015
-
[27]
N. Rendon, J. H. Giraldo, T. Bouwmans, S. Rodr ´ıguez-Buritica, E. Ramirez, and C. Isaza, “Uncertainty clustering internal validity as- sessment using fr ´echet distance for unsupervised learning,”Engineering Applications of Artificial Intelligence, vol. 124, p. 106635, 2023
work page 2023
-
[28]
An rfid and computer vision fusion system for book inventory using mobile robot,
J. Zhang, X. Liu, T. Gu, B. Zhang, D. Liu, Z. Liu, and K. Li, “An rfid and computer vision fusion system for book inventory using mobile robot,” in IEEE INFOCOM 2022-IEEE conference on computer communications. IEEE, 2022, pp. 1239–1248
work page 2022
-
[29]
Location, tracking and identification with rfid and vision data fusion,
A. Isasi, S. Rodriguez, J. L. De Armentia, and A. Villodas, “Location, tracking and identification with rfid and vision data fusion,” inEuropean Workshop on Smart Objects: Systems, Technologies and Applications. VDE, 2010, pp. 1–6
work page 2010
-
[30]
T. Deyle, H. Nguyen, M. Reynolds, and C. C. Kemp, “Rf vision: Rfid receive signal strength indicator (rssi) images for sensor fusion and mobile manipulation,” in2009 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2009, pp. 5553–5560
work page 2009
-
[31]
Vision and rfid data fusion for tracking people in crowds by a mobile robot,
T. Germa, F. Lerasle, N. Ouadah, and V . Cadenat, “Vision and rfid data fusion for tracking people in crowds by a mobile robot,”Computer Vision and Image Understanding, vol. 114, no. 6, pp. 641–651, 2010
work page 2010
-
[32]
Spatial perception of tagged cargo using fused rfid and cv data in intelligent storage,
Y . Ma, D. Su, Y . Li, C. Tian, and W. Meng, “Spatial perception of tagged cargo using fused rfid and cv data in intelligent storage,”IEEE Internet of Things Journal, vol. 10, no. 2, pp. 1574–1587, 2023
work page 2023
-
[33]
Rvtrack: Identity tracking by rfid- vision fusion with small training cost,
H. Cai, A. Bal, and C. Qian, “Rvtrack: Identity tracking by rfid- vision fusion with small training cost,” in2024 IEEE 21st International Conference on Mobile Ad-Hoc and Smart Systems (MASS). IEEE, 2024, pp. 29–37
work page 2024
-
[34]
Robust rfid- based multi-object identification and tracking with visual aids,
J. Yin, S. Liao, C. Duan, X. Ding, Z. Yang, and Z. Yin, “Robust rfid- based multi-object identification and tracking with visual aids,” in2021 18th Annual IEEE International Conference on Sensing, Communica- tion, and Networking (SECON). IEEE, 2021, pp. 1–9
work page 2021
-
[35]
Tagattention: Mobile object tracing with zero appearance knowledge by vision-rfid fusion,
X. Shi, H. Cai, M. Wang, G. Wang, B. Huang, J. Xie, and C. Qian, “Tagattention: Mobile object tracing with zero appearance knowledge by vision-rfid fusion,”IEEE/ACM Transactions on Networking, vol. 29, no. 2, pp. 890–903, 2021
work page 2021
-
[36]
Rf-annotate: Automatic rf-supervised image annotation of common objects in context,
E. Sie and D. Vasisht, “Rf-annotate: Automatic rf-supervised image annotation of common objects in context,” in2022 International Con- ference on Robotics and Automation (ICRA), 2022, pp. 2590–2596
work page 2022
-
[37]
A new approach to linear filtering and prediction problems,
R. E. Kalman, “A new approach to linear filtering and prediction problems,”Transactions of the ASME–Journal of Basic Engineering, vol. 82, no. Series D, pp. 35–45, 1960
work page 1960
-
[38]
G. L. Smith, S. F. Schmidt, and L. A. McGee,Application of statistical filter theory to the optimal estimation of position and velocity on board a circumlunar vehicle. National Aeronautics and Space Administration, 1962, vol. 135
work page 1962
-
[39]
C. E. Rasmussen and C. K. I. Williams,Gaussian process for machine learning. The MIT Press, 2006
work page 2006
-
[40]
Computing discrete fr ´echet distance,
T. Eiter, H. Mannilaet al., “Computing discrete fr ´echet distance,” 1994
work page 1994
-
[41]
Intel realsense stereoscopic depth cameras,
L. Keselman, J. Iselin Woodfill, A. Grunnet-Jepsen, and A. Bhowmik, “Intel realsense stereoscopic depth cameras,” inProceedings of the IEEE conference on computer vision and pattern recognition workshops, 2017, pp. 1–10
work page 2017
-
[42]
On the generalized distance in statistics
P. C. Mahalanobis, “On the generalized distance in statistics.” National Institute of Science of India, 1936
work page 1936
-
[43]
Poi: Multiple object tracking with high performance detection and appearance feature,
F. Yu, W. Li, Q. Li, Y . Liu, X. Shi, and J. Yan, “Poi: Multiple object tracking with high performance detection and appearance feature,” in Computer Vision – ECCV 2016 Workshops, G. Hua and H. J ´egou, Eds. Cham: Springer International Publishing, 2016, pp. 36–42
work page 2016
-
[44]
Computer vision-assisted 3d object localization via cots rfid devices and a monoc- ular camera,
Z. Wang, M. Xu, N. Ye, F. Xiao, R. Wang, and H. Huang, “Computer vision-assisted 3d object localization via cots rfid devices and a monoc- ular camera,”IEEE Transactions on Mobile Computing, vol. 20, no. 3, pp. 893–908, 2019
work page 2019
-
[45]
Rfid and camera fusion for recognition of human-object interactions,
X. Liu, D. Liu, J. Zhang, T. Gu, and K. Li, “Rfid and camera fusion for recognition of human-object interactions,” inProceedings of the 27th Annual International Conference on Mobile Computing and Networking, 2021, pp. 296–308
work page 2021
-
[46]
Stereo processing by semiglobal matching and mu- tual information,
H. Hirschmuller, “Stereo processing by semiglobal matching and mu- tual information,”IEEE Transactions on pattern analysis and machine intelligence, vol. 30, no. 2, pp. 328–341, 2008
work page 2008
-
[47]
R. Hartley and A. Zisserman,Multiple View Geometry in Computer Vision, 2nd ed. Cambridge University Press, 2003
work page 2003
-
[48]
A flexible new technique for camera calibration,
Z. Zhang, “A flexible new technique for camera calibration,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 22, no. 11, pp. 1330–1334, 2000
work page 2000
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.