Autonomous Traffic Signal Optimization Using Digital Twin and Agentic AI for Real-Time Decision-Making
Pith reviewed 2026-05-07 06:55 UTC · model grok-4.3
The pith
A digital twin kept current by sensors and directed by agentic AI can adjust traffic signals in real time to shorten waits and improve flow more than fixed schedules or reinforcement learning controls.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
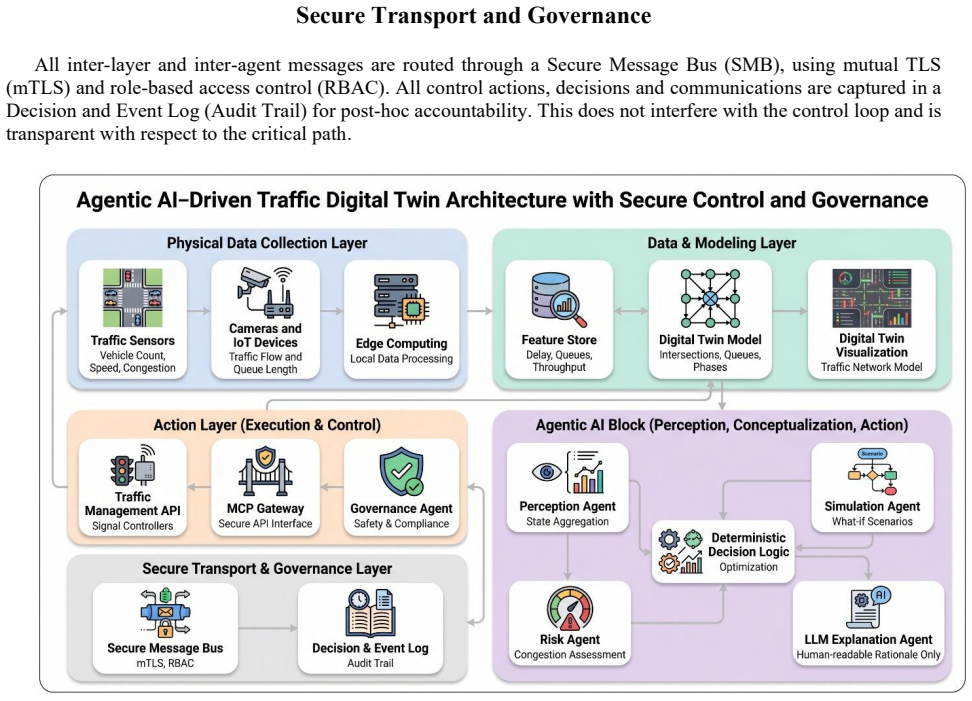
The framework relies on physical sensors and edge computing to measure real-time traffic information and simulate traffic flow in a constantly updated digital twin. The traffic light is automatically controlled through the digital twin according to traffic congestion, travel delay and traffic patterns. This approach is implemented as a three-layer system: perception, conceptualization and action. The results show that the framework minimizes waiting time at traffic lights and positively affects the effectiveness of the entire traffic flow, which is better than the fixed-time and reinforcement learning-based baselines.
What carries the argument
The digital twin, a continuously refreshed simulation of the physical intersection fed by live sensor data and steered by agentic AI through perception, conceptualization, and action layers, which converts real-time traffic measurements directly into signal timing commands.
If this is right
- Waiting times at traffic lights decrease because signal phases respond to measured congestion and delay.
- Overall traffic flow effectiveness increases across the controlled area.
- The method outperforms both fixed-time signal plans and reinforcement-learning controllers on the same metrics.
- Control occurs autonomously once the digital twin is running, without continuous human oversight.
- The three-layer structure separates data collection, situation interpretation, and action execution so each can be updated independently.
Where Pith is reading between the lines
- City-scale networks of such twins could coordinate adjacent intersections to create green-wave progressions that fixed plans rarely achieve.
- Reduced stop-and-go traffic would lower aggregate fuel consumption and emissions even if total vehicle miles stay the same.
- Sensor or model drift over time could silently degrade performance, requiring periodic recalibration against ground-truth counts.
- The same twin could later accept inputs from connected vehicles to refine its predictions of incoming demand.
Load-bearing premise
The digital twin must accurately mirror real-world traffic dynamics at every moment, and the agentic AI must generate safe and optimal signal decisions even in unusual or unexpected situations.
What would settle it
A side-by-side field trial at matched real intersections where one uses the digital-twin system and the other uses fixed timing, recording average vehicle wait times and any unsafe phase changes over multiple weeks under comparable traffic volumes.
Figures


read the original abstract
This article outlines a new framework of traffic light optimization through a digital twin of the transport infrastructure, managed by agentic AI to ensure real-time autonomous decisions. The framework relies on physical sensors and edge computing to measure real-time traffic information and simulate traffic flow in a constantly updated digital twin. The traffic light is automatically controlled through the digital twin according to traffic congestion, travel delay and traffic patterns. This approach is implemented as a three-layer system: perception, conceptualization and action. The perception layer receives data on physical systems; the conceptualization layer uses LangChain to process the data; and the action layer links to the Model Context Protocol (MCP) and traffic management APIs to implement optimised traffic signal control algorithms. The results show that the framework minimizes waiting time at traffic lights and positively affects the effectiveness of the entire traffic flow, which is better than the fixed-time and reinforcement learning-based baselines.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a framework for real-time autonomous traffic signal optimization that combines a sensor-updated digital twin of the transportation network with an agentic AI system. It is implemented as a three-layer architecture: a perception layer that ingests physical sensor data via edge computing, a conceptualization layer that processes information using LangChain, and an action layer that applies optimized control via the Model Context Protocol (MCP) and traffic APIs. The central claim is that this system reduces waiting times at intersections and improves overall traffic flow more effectively than fixed-time and reinforcement-learning baselines.
Significance. If the performance claims were supported by reproducible experiments, the work could contribute to intelligent transportation systems by demonstrating a practical integration of digital twins with LLM-based agents for dynamic control. The three-layer design and use of edge computing address real-time requirements in a potentially scalable manner. As presented, however, the absence of any empirical validation or implementation details severely limits the significance.
major comments (4)
- [Abstract] Abstract: The statement that 'the results show that the framework minimizes waiting time at traffic lights and positively affects the effectiveness of the entire traffic flow, which is better than the fixed-time and reinforcement learning-based baselines' is unsupported by any quantitative metrics, tables, figures, experimental setup, number of runs, or statistical tests. This is load-bearing for the paper's primary contribution.
- [Framework / Digital Twin] Digital Twin Description: No traffic flow model equations, simulator (e.g., SUMO or VISSIM parameters), calibration procedure against real sensor data, or validation metrics for the twin's accuracy are provided. Without these, the claim that the twin 'accurately represents real-world traffic dynamics at all times' cannot be assessed.
- [Conceptualization and Action Layers] Agentic AI Layers: The conceptualization layer (LangChain) and action layer (MCP) lack any prompt templates, LLM version or configuration, decision-making logic, training details, or safety constraints/fallback mechanisms. This is critical for the claim of safe, optimal autonomous decisions without human intervention.
- [Results / Experiments] Evaluation: There is no description of experimental scenarios, baseline implementations, performance metrics (waiting time, throughput, etc.), statistical analysis, or edge-case testing. The superiority claim therefore cannot be reproduced or distinguished from simulation artifacts.
minor comments (3)
- [Introduction] A dedicated Related Work section comparing the approach to prior digital-twin and RL-based traffic control literature is missing.
- [General] A system architecture diagram showing data flows between the three layers, sensors, digital twin, and APIs would substantially improve clarity.
- [Abstract] The abstract would be strengthened by including concrete improvement percentages or effect sizes if such results exist in the full manuscript.
Simulated Author's Rebuttal
We thank the referee for their thorough review and valuable comments. We agree that the current version of the manuscript lacks sufficient implementation details and empirical validation to fully support the performance claims. We will revise the paper to include the requested information, enhancing the description of the framework and adding a comprehensive experimental section with quantitative results from simulations.
read point-by-point responses
-
Referee: [Abstract] Abstract: The statement that 'the results show that the framework minimizes waiting time at traffic lights and positively affects the effectiveness of the entire traffic flow, which is better than the fixed-time and reinforcement learning-based baselines' is unsupported by any quantitative metrics, tables, figures, experimental setup, number of runs, or statistical tests. This is load-bearing for the paper's primary contribution.
Authors: We acknowledge that the abstract claim is not supported by data in the submitted manuscript. This was an oversight. In the revised manuscript, we will modify the abstract to state that the framework is designed to minimize waiting times based on its real-time adaptation capabilities, and we will add a new 'Experimental Evaluation' section that includes quantitative results from SUMO simulations, including tables comparing waiting times and other metrics, figures of traffic flow, details on multiple simulation runs, and statistical tests to demonstrate improvements over the baselines. revision: yes
-
Referee: [Framework / Digital Twin] Digital Twin Description: No traffic flow model equations, simulator (e.g., SUMO or VISSIM parameters), calibration procedure against real sensor data, or validation metrics for the twin's accuracy are provided. Without these, the claim that the twin 'accurately represents real-world traffic dynamics at all times' cannot be assessed.
Authors: We agree that more details are needed. We will expand the 'Digital Twin' subsection to include the traffic flow model equations, specify the simulator (SUMO) and its key parameters, describe the calibration procedure against real sensor data, and provide validation metrics for the twin's accuracy to support the representation claim. revision: yes
-
Referee: [Conceptualization and Action Layers] Agentic AI Layers: The conceptualization layer (LangChain) and action layer (MCP) lack any prompt templates, LLM version or configuration, decision-making logic, training details, or safety constraints/fallback mechanisms. This is critical for the claim of safe, optimal autonomous decisions without human intervention.
Authors: We will provide the missing details in the revised 'Conceptualization Layer' and 'Action Layer' sections. This includes sample prompt templates for the LangChain agents, the specific LLM version and configuration used, the decision-making logic of the agents, and safety constraints along with fallback mechanisms to ensure safe autonomous operation. revision: yes
-
Referee: [Results / Experiments] Evaluation: There is no description of experimental scenarios, baseline implementations, performance metrics (waiting time, throughput, etc.), statistical analysis, or edge-case testing. The superiority claim therefore cannot be reproduced or distinguished from simulation artifacts.
Authors: We will add a full 'Evaluation' section describing the experimental scenarios (e.g., various intersection types and traffic conditions), how the baselines were implemented, the performance metrics used (waiting time, throughput, etc.), the statistical analysis performed, and testing of edge cases. This will allow reproduction and validation of the superiority claim. revision: yes
Circularity Check
No circularity: system description relies on external sensor data and unreported experiments without self-referential reductions
full rationale
The manuscript describes a three-layer architecture (perception, conceptualization via LangChain, action via MCP) that ingests real-time sensor data into a digital twin and outputs traffic signal controls. No equations, fitted parameters, or derivation steps are presented that would allow any 'prediction' to reduce to its own inputs by construction. Performance claims compare against fixed-time and RL baselines but are not shown to be tautological within the text; they depend on external validation that is simply not detailed here. No self-citations, uniqueness theorems, or ansatzes are invoked in a load-bearing way. The derivation chain is therefore self-contained as an engineering framework description rather than a closed mathematical loop.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Real-time sensor data can be used to maintain an accurate digital twin of traffic conditions.
- domain assumption The agentic AI implemented with LangChain can autonomously generate reliable and optimal traffic signal control actions.
Reference graph
Works this paper leans on
-
[1]
The Cost of Traffic Congestion: A Global Review,
K. L. K. K. and T. W. D., “The Cost of Traffic Congestion: A Global Review,” Transport Policy, vol. 20, pp. 134– 146, 2022
work page 2022
-
[2]
An Overview of Traffic Management Systems,
P. S. Nguyen et al., “An Overview of Traffic Management Systems,” Journal of Intelligent Transportation Systems, vol. 10, no. 3, pp. 45–53, 2021
work page 2021
-
[3]
Digital Twin for Smart Cities: Traffic Management and Optimization,
S. A. K. Lee et al., “Digital Twin for Smart Cities: Traffic Management and Optimization,” IEEE Transactions on Smart Cities, vol. 12, pp. 1001–1012, 2023
work page 2023
-
[4]
Fixed -time Traffic Control versus Adaptive Systems: A Comparison,
B. R. Williams et al. , “Fixed -time Traffic Control versus Adaptive Systems: A Comparison,” Journal of Transportation Engineering, vol. 12, no. 4, pp. 123–135, 2020
work page 2020
-
[5]
Dynamic Traffic Signal Optimization Using Adaptive Learning,
H. I. Wright, J. E. Rosenthal, and R. D. Conners, “Dynamic Traffic Signal Optimization Using Adaptive Learning,” Transportation Research Part C, vol. 57, pp. 23–38, 2022
work page 2022
-
[6]
Reinforcement Learning for Traffic Signal Control: Current State and Future Directions,
P. Z. Wang and X. Zhang, “Reinforcement Learning for Traffic Signal Control: Current State and Future Directions,” Artificial Intelligence Review, vol. 34, pp. 1181–1194, 2022
work page 2022
-
[7]
Implementing Digital Twin Technology for Traffic Flow Simulation and Optimization,
M. H. Lee et al. , “Implementing Digital Twin Technology for Traffic Flow Simulation and Optimization,” Transportation Science, vol. 53, no. 4, pp. 2034–2045, 2021
work page 2034
-
[8]
Multi -Agent Systems for Traffic Signal Optimization,
J. L. Grimes, “Multi -Agent Systems for Traffic Signal Optimization,” International Journal of Traffic and Transportation Engineering, vol. 5, no. 2, pp. 98–107, 2023
work page 2023
-
[9]
Digital Twins for Traffic Management: A Review,
M. P. Bradley and C. G. Thomason, “Digital Twins for Traffic Management: A Review,” Transportation Research Part C, vol. 112, pp. 259–277, 2020
work page 2020
-
[10]
Smart Traffic Management Using Digital Twins: A Case Study of Real - Time Traffic Simulation,
J. A. Kim, A. S. Lee, and B. K. Lim, “Smart Traffic Management Using Digital Twins: A Case Study of Real - Time Traffic Simulation,” Journal of Urban Computing, vol. 3, no. 1, pp. 55–67, 2021
work page 2021
-
[11]
Multi-Agent Systems for Autonomous Traffic Management Using Reinforcement Learning,
S. J. Shaw and M. A. Koffman, “Multi-Agent Systems for Autonomous Traffic Management Using Reinforcement Learning,” IEEE Transactions on Intelligent Transportation Systems, vol. 22, no. 4, pp. 2135–2148, 2021
work page 2021
-
[12]
Machine Learning Approaches for Traffic Flow Prediction and Signal Optimization,
L. Zhang, Y. Xie, and F. Chen, “Machine Learning Approaches for Traffic Flow Prediction and Signal Optimization,” Artificial Intelligence Review, vol. 53, pp. 2345–2359, 2022
work page 2022
-
[13]
Reinforcement Learning for Adaptive Traffic Control Systems: A Review,
A. G. Wilkins, “Reinforcement Learning for Adaptive Traffic Control Systems: A Review,” IEEE Access, vol. 8, pp. 123456–123467, 2020
work page 2020
-
[14]
GraphChain: Orchestrating Multi-Agent Workflows for Real-Time Decision Making,
T. L. Wang and Y. T. Li, “GraphChain: Orchestrating Multi-Agent Workflows for Real-Time Decision Making,” Journal of AI and Robotics, vol. 5, no. 3, pp. 45–56, 2021
work page 2021
-
[15]
Secure and Scalable APIs for Traffic Management Systems: A Model Context Protocol (MCP) Approach,
F. M. Sun and A. N. Bhat, “Secure and Scalable APIs for Traffic Management Systems: A Model Context Protocol (MCP) Approach,” International Journal of Software Engineering, vol. 11, no. 1, pp. 78–90, 2022
work page 2022
-
[16]
A Blockchain -Monitored Agentic AI Architecture for Trusted Perception –Reasoning–Action Pipelines,
S. Jan, H. A. Razzaqi, A. Akarma and M. R. Belgaum, "A Blockchain -Monitored Agentic AI Architecture for Trusted Perception –Reasoning–Action Pipelines," 2025 International Conference on Computer and Applications (ICCA), Bahrain, Bahrain, 2025, pp. 1-7
work page 2025
-
[17]
Syed, T. A., Akarma, A., Naqash, M. T., Hameed, D., Kamal, S., & Formisano, A. (2026). Agentic AI for Climate-Resilient Cities: A PRISMA-Guided Review and Digital Twin Framework. Preprints
work page 2026
-
[18]
Ismail, R., Syed, T. A., & Musa, S. (2014, January). Design and implementation of an efficient framework for behaviour attestation using n -call slides. In Proceedings of the 8th International Conference on Ubiquitous Information Management and Communication (pp. 1-8)
work page 2014
-
[19]
Jan, S., Ali, T., Alzahrani, A., & Musa, S. (2018). Deep convolutional generative adversarial networks for intent - based dynamic behavior capture. Int. J. Eng. Technol, 7(4), 101-103
work page 2018
-
[20]
Syed, T. A., Jan, S., Siddiqui, M. S., Alzahrani, A., Nadeem, A., Ali, A., & Ullah, A. (2022). CAR -tourist: An integrity-preserved collaborative augmented reality framework-tourism as a use-case. Applied Sciences, 12(23), 12022
work page 2022
-
[21]
A., Ali, G., Akarma, A., Belgaum, M
Jan, S., Syed, T. A., Ali, G., Akarma, A., Belgaum, M. R., & Ali, A. (2025). Agentic ai framework for individuals with disabilities and neurodivergence: A multi -agent system for healthy eating, daily routines, and inclusive well-being. arXiv preprint arXiv:2511.22737
-
[22]
A., Khan, S., Jan, S., Ali, G., Nauman, M., Akarma, A., & Ali, A
Syed, T. A., Khan, S., Jan, S., Ali, G., Nauman, M., Akarma, A., & Ali, A. (2025). Agentic ai framework for cloudburst prediction and coordinated response. arXiv preprint arXiv:2511.22767
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.