The Keplerian Traveling Salesperson Problem
Pith reviewed 2026-05-15 12:29 UTC · model grok-4.3
The pith
The continuous problem of visiting multiple moving orbital targets can be exactly recast as a discrete optimization task on a time-expanded network.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that the Keplerian TSP admits a rigorous time-unfolded formulation that turns the original continuous, time-dependent planning task into a discrete optimization problem on a time-expanded network; this network can be solved exactly by integer-linear-programming methods that incorporate Interval-based Dynamic Discretization Discovery, and the same representation yields a publicly released benchmark suite together with optimality-preserving preprocessing and heuristic routines.
What carries the argument
The time-unfolding technique that builds a time-expanded network whose discrete paths correspond to feasible continuous Keplerian trajectories.
If this is right
- Small-to-medium multi-rendezvous missions become solvable to proven optimality with off-the-shelf ILP solvers.
- The released benchmark set supplies a standard test bed for comparing exact and heuristic methods on astrodynamic TSP variants.
- Preprocessing routines that preserve optimality can be used to reduce instance size before calling any solver.
- The same time-expanded encoding supports both exact solution and the construction of fast improvement heuristics.
Where Pith is reading between the lines
- The same unfolding idea could be tested on higher-fidelity dynamics that include perturbations once the discretization error is quantified.
- Integration of the network model with existing mission-design tools would allow automatic generation of feasible itineraries for active-debris-removal campaigns.
- The benchmark instances may stimulate development of specialized branch-and-cut routines that exploit orbital symmetry.
Load-bearing premise
The chosen time discretization and dynamic discovery procedure keep the continuous orbital dynamics close enough that the discrete solutions remain feasible and near-optimal for the mission sizes considered.
What would settle it
A concrete instance in which a discrete network solution, when simulated with the true continuous Keplerian dynamics, violates a rendezvous window or exceeds the reported cost bound by more than the solver tolerance.
Figures








read the original abstract
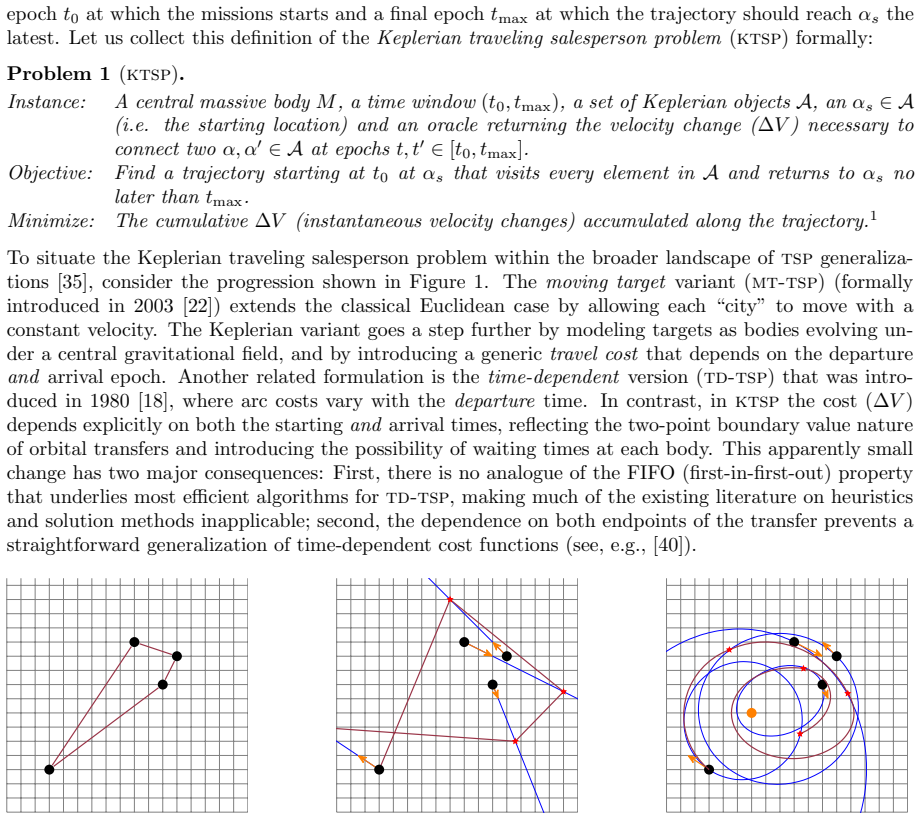
We address a fundamental challenge in space mission design and space logistics: planning interplanetary trajectories for missions that must rendezvous with multiple bodies. Such mission occur, for instance, in active debris removal, in-orbit servicing, or asteroid belt exploration. We model these problems as a variant of the Traveling salesperson problem (TSP), which we term the Keplerian TSP (KTSP). Unlike the well-studied TSP, the KTSP accounts for the motion of orbital targets, leading to time-dependent and asymmetric transfer costs that capture key real-world effects in astrodynamics. We provide a rigorous formalization of the KTSP and release a benchmark suite to support its study. Central to our approach is a time-unfolding technique that reformulates the continuous problem as a discrete optimization task in a time-expanded network. This representation makes the benchmark accessible to researchers in discrete optimization even without prior knowledge of celestial mechanics. We also develop an alternative encoding as an integer linear program using Interval-based Dynamic Discretization Discovery to handle the time-dependent nature of transfers. We leverage state-of-the-art ILP solvers to solve the KTSP instances, accompanied by a detailed computational study that highlights their strengths and limitations. We complement these exact methods with an initial solution heuristic, an improvement heuristic, and preprocessing routines that preserve optimality.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper formalizes the Keplerian Traveling Salesperson Problem (KTSP) as a time-dependent, asymmetric TSP variant for rendezvous missions with moving orbital targets. It introduces a time-unfolding reformulation that converts the continuous problem into a discrete optimization task over a time-expanded network, develops an integer linear programming encoding via Interval-based Dynamic Discretization Discovery (IDDD), releases a benchmark suite, and reports computational results from state-of-the-art ILP solvers together with initial and improvement heuristics.
Significance. If the discretization scheme produces solutions whose extracted continuous trajectories remain feasible under true Keplerian dynamics, the work supplies a concrete bridge between combinatorial optimization and astrodynamics. The benchmark release and the explicit time-expanded network representation lower the barrier for discrete-optimization researchers to engage with realistic space-logistics instances.
major comments (3)
- [§3] §3 (Time-unfolding construction): the manuscript asserts that discrete optima map to feasible continuous Keplerian trajectories, yet provides neither a priori error bounds on the chosen time intervals nor a convergence argument as the discretization is refined. Without such guarantees, it is unclear whether the reported ILP solutions satisfy rendezvous conditions to within typical astrodynamic tolerances (position < 10 km, velocity < 0.1 m/s).
- [§4.2] §4.2 (IDDD formulation): the linear cost matrix used inside the ILP is obtained from Lambert or Keplerian transfer approximations evaluated at interval midpoints; the paper does not quantify the deviation of these costs from the true nonlinear transfer time and Δv when the optimal discrete tour is re-propagated in continuous time.
- [Table 2] Table 2 (computational results): the reported optimality gaps and runtimes are given only for the discretized ILP; no post-processing validation column shows the position/velocity residuals of the recovered continuous trajectories, leaving open the possibility that some “optimal” tours are infeasible once the continuous dynamics are restored.
minor comments (2)
- [§3] Notation for the time-expanded graph (nodes, arcs, and interval indices) is introduced without a compact summary table; a single table collecting all symbols would improve readability.
- [§5] The benchmark suite is stated to be released, but the manuscript does not specify the exact file formats, orbital-element conventions, or how the continuous reference trajectories are stored for validation.
Simulated Author's Rebuttal
Thank you for the thorough and constructive review of our manuscript on the Keplerian Traveling Salesperson Problem. We appreciate the emphasis on validating the continuous feasibility of the discrete solutions and agree that additional analysis will strengthen the paper. We address each major comment below, outlining the revisions we plan to incorporate.
read point-by-point responses
-
Referee: [§3] §3 (Time-unfolding construction): the manuscript asserts that discrete optima map to feasible continuous Keplerian trajectories, yet provides neither a priori error bounds on the chosen time intervals nor a convergence argument as the discretization is refined. Without such guarantees, it is unclear whether the reported ILP solutions satisfy rendezvous conditions to within typical astrodynamic tolerances (position < 10 km, velocity < 0.1 m/s).
Authors: We acknowledge that the manuscript does not provide explicit a priori error bounds or a formal convergence argument for the time-unfolding discretization. In the revised version, we will add a dedicated subsection on discretization error that includes empirical validation: we will re-propagate all reported optimal discrete tours under continuous Keplerian dynamics and tabulate the resulting position and velocity residuals. While deriving tight theoretical bounds is beyond the current scope, the numerical evidence will demonstrate that residuals remain within typical astrodynamic tolerances for the benchmark instances, thereby confirming practical feasibility. revision: yes
-
Referee: [§4.2] §4.2 (IDDD formulation): the linear cost matrix used inside the ILP is obtained from Lambert or Keplerian transfer approximations evaluated at interval midpoints; the paper does not quantify the deviation of these costs from the true nonlinear transfer time and Δv when the optimal discrete tour is re-propagated in continuous time.
Authors: We agree that quantifying the approximation error introduced by midpoint evaluations is necessary. We will revise §4.2 to include a quantitative comparison: for each optimal tour, we will solve the continuous boundary-value problem to obtain exact transfer times and Δv values, then report the absolute and relative deviations from the midpoint-based costs used in the ILP. This analysis will be supported by additional figures or tables showing the distribution of these deviations across the benchmark set. revision: yes
-
Referee: [Table 2] Table 2 (computational results): the reported optimality gaps and runtimes are given only for the discretized ILP; no post-processing validation column shows the position/velocity residuals of the recovered continuous trajectories, leaving open the possibility that some “optimal” tours are infeasible once the continuous dynamics are restored.
Authors: This observation is correct. We will extend Table 2 (or add a companion table) with columns reporting the maximum position and velocity residuals obtained after continuous propagation of each recovered trajectory. A short paragraph will describe the post-processing procedure used to extract and validate the continuous solutions from the discrete optima. These additions will directly address concerns about feasibility under true Keplerian dynamics. revision: yes
Circularity Check
No significant circularity in KTSP formalization or time-unfolding reformulation
full rationale
The paper introduces a new formalization of the Keplerian TSP as a time-dependent asymmetric TSP variant, reformulated via time-unfolding into a discrete optimization problem on a time-expanded network and solved via ILP with Interval-based Dynamic Discretization Discovery. No derivation step reduces by construction to fitted parameters, self-definitions, or load-bearing self-citations; the central claims rest on standard TSP encodings and orbital-mechanics transfer models without tautological equivalence to inputs. The benchmark suite and heuristics are presented as independent contributions.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Two-body Keplerian orbital motion with point-mass gravity and no perturbations
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
time-unfolding technique that reformulates the continuous problem as a discrete optimization task in a time-expanded network
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Solving the Asymmetric Travelling Salesman Problem with Time Windows by Branch-and-Cut.Math
Norbert Ascheuer, Matteo Fischetti, and Martin Gr¨ otschel. Solving the Asymmetric Travelling Salesman Problem with Time Windows by Branch-and-Cut.Math. Program., 90(3):475–506, 2001. doi:10.1007/PL00011432
-
[2]
Jun Bang and Jaemyung Ahn. Multitarget Rendezvous for Active Debris Removal using Multiple Spacecraft.Journal of Spacecraft and Rockets, 56(4):1237–1247, 2019
work page 2019
-
[3]
Dataset of Keplerian TSP Instances from ESA’s ACT
Max Bannach, Giacomo Acciarini, and Dario Izzo. Dataset of Keplerian TSP Instances from ESA’s ACT. February 2025.doi:10.5281/zenodo.14850862
-
[4]
Natashia Boland, Mike Hewitt, Luke Marshall, and Martin W. P. Savelsbergh. The Continuous- Time Service Network Design Problem.Oper. Res., 65(5):1303–1321, 2017.doi:10.1287/OPRE. 2017.1624
-
[5]
Jean-Marie Bourjolly, Ozgur Gurtuna, and Aleksander Lyngvi. On-Orbit Servicing: A Time- Dependent, Moving-Target Traveling Salesman Problem.International Transactions in Operational Research, 13(5):461–481, 2006
work page 2006
-
[6]
Lorenzo Casalino and Guido Colasurdo. Problem Description for the 7th Global Trajectory Optimi- sation Competition.GTOC Portal, http://sophia. estec. esa. int/gtoc portal, 2014
work page 2014
-
[7]
Max Cerf. Multiple Space Debris Collecting Mission — Debris Selection and Trajectory Optimiza- tion.Journal of Optimization Theory and Applications, 156(3):761–796, 2013
work page 2013
-
[8]
Last Fifty Years of Integer Linear Programming: A Focus on Recent Practical Advances.Eur
Fran¸ cois Clautiaux and Ivana Ljubic. Last Fifty Years of Integer Linear Programming: A Focus on Recent Practical Advances.Eur. J. Oper. Res., 324(3):707–731, 2025.doi:10.1016/J.EJOR.2024. 11.018
-
[9]
Anna Livia Croella, Bjørnar Luteberget, Carlo Mannino, and Paolo Ventura. A MaxSAT Approach for Solving a New Dynamic Discretization Discovery Model for Train Rescheduling Problems.Com- put. Oper. Res., 167:106679, 2024.doi:10.1016/J.COR.2024.106679
-
[10]
A Method for Solving Traveling-Salesman Problems.Operations research, 6(6):791– 812, 1958
Georges A Croes. A Method for Solving Traveling-Salesman Problems.Operations research, 6(6):791– 812, 1958
work page 1958
-
[11]
Marek Cygan, Fedor V. Fomin, Lukasz Kowalik, Daniel Lokshtanov, D´ aniel Marx, Marcin Pilipczuk, Michal Pilipczuk, and Saket Saurabh. Parameterized Algorithms, 2015.doi:10.1007/ 978-3-319-21275-3
work page 2015
-
[12]
K Daneshjou, AA Mohammadi-Dehabadi, and Majid Bakhtiari. Mission Planning for On-Orbit Servicing Through Multiple Servicing Satellites: A New Approach.Advances in Space Research, 60(6):1148–1162, 2017
work page 2017
-
[13]
George B. Dantzig, D. Ray Fulkerson, and Selmer M. Johnson. Solution of a Large-Scale Traveling- Salesman Problem.Oper. Res., 2(4):393–410, 1954.doi:10.1287/OPRE.2.4.393
-
[14]
Sparse Dynamic Discretization Discovery via Arc- Dependent Time Discretizations.Comput
Madison Van Dyk and Jochen K¨ onemann. Sparse Dynamic Discretization Discovery via Arc- Dependent Time Discretizations.Comput. Oper. Res., 169:106715, 2024.doi:10.1016/J.COR. 2024.106715
-
[15]
David Escobar-Vargas and Teodor Gabriel Crainic. Multi-Attribute Two-Echelon Location Routing: Formulation and Dynamic Discretization Discovery Approach.Eur. J. Oper. Res., 314(1):66–78, 2024.doi:10.1016/J.EJOR.2023.09.031
-
[16]
Lorenzo Federici, Alessandro Zavoli, and Guido Colasurdo. A Time-Dependent TSP Formulation for the Design of an Active Debris Removal Mission using Simulated Annealing.arXiv preprint arXiv:1909.10427, 2019
-
[17]
The Traveling-Salesman Problem.Operations research, 4(1):61–75, 1956
Merrill M Flood. The Traveling-Salesman Problem.Operations research, 4(1):61–75, 1956. 14
work page 1956
-
[18]
Kenneth R Fox, Bezalel Gavish, and Stephen C Graves. An n-Constraint Formulation of the (Time- Dependent) Traveling Salesman Problem.Operations Research, 28(4):1018–1021, 1980
work page 1980
-
[19]
GTOC5: Problem Statement and Notes on Solution Verifi- cation.Acta Futura, 8:9–19, 2014
Ilia S Grigoriev and Maxim P Zapletin. GTOC5: Problem Statement and Notes on Solution Verifi- cation.Acta Futura, 8:9–19, 2014
work page 2014
-
[20]
Gurobi Optimizer Reference Manual, 2025
Gurobi Optimization, LLC. Gurobi Optimizer Reference Manual, 2025. URL:https://www.gurobi. com
work page 2025
-
[21]
Edward Yuhang He, Natashia Boland, George L. Nemhauser, and Martin W. P. Savelsbergh. Dy- namic Discretization Discovery Algorithms for Time-Dependent Shortest Path Problems.INFORMS J. Comput., 34(2):1086–1114, 2022.doi:10.1287/IJOC.2021.1084
-
[22]
The Moving-Target Traveling Salesman Problem.Journal of Algorithms, 49(1):153–174, 2003
Christopher S Helvig, Gabriel Robins, and Alex Zelikovsky. The Moving-Target Traveling Salesman Problem.Journal of Algorithms, 49(1):153–174, 2003
work page 2003
-
[23]
Liqiang Hou and Arun Misra. Traveling Salesman Problem of Optimal Debris Removal Sequence using Non-Population Gradient Search.Acta Astronautica, 215:373–386, 2024
work page 2024
-
[24]
An-yi Huang, Heng-nian Li, and Ya-zhong Luo. Rapid Cost Evaluation Model for Order- Undetermined Multi-Asteroid Rendezvous Missions.Journal of Guidance, Control, and Dynamics, pages 1–10, 2025
work page 2025
-
[25]
Evolving Solutions to TSP Variants for Active Space Debris Removal
Dario Izzo, Ingmar Getzner, Daniel Hennes, and Lu´ ıs Felismino Sim˜ oes. Evolving Solutions to TSP Variants for Active Space Debris Removal. InProceedings of the 2015 annual conference on genetic and evolutionary computation, pages 1207–1214, 2015
work page 2015
-
[26]
Dario Izzo, Daniel Hennes, Lu´ ıs F Sim˜ oes, and Marcus M¨ artens. Designing Complex Interplanetary Trajectories for the Global Trajectory Optimization Competitions.Space Engineering: Modeling and Optimization with Case Studies, pages 151–176, 2016
work page 2016
-
[27]
The Kessler Run: On the Design of the GTOC9 Challenge.Acta Futura, 11(1):11–24, 2018
Dario Izzo and Marcus M¨ artens. The Kessler Run: On the Design of the GTOC9 Challenge.Acta Futura, 11(1):11–24, 2018
work page 2018
-
[28]
Liebling, Denis Naddef, George L
Michael J¨ unger, Thomas M. Liebling, Denis Naddef, George L. Nemhauser, William R. Pulleyblank, Gerhard Reinelt, Giovanni Rinaldi, and Laurence A. Wolsey. 50 Years of Integer Programming 1958- 2008 - From the Early Years to the State-of-the-Art, publisher = Springer. 2010.doi:10.1007/ 978-3-540-68279-0
work page 1958
-
[29]
Felipe Lagos, Natashia Boland, and Martin W. P. Savelsbergh. Dynamic discretization discovery for solving the Continuous Time Inventory Routing Problem with Out-and-Back Routes.Comput. Oper. Res., 141:105686, 2022.doi:10.1016/J.COR.2021.105686
-
[30]
HaiYang Li and HeXi Baoyin. Sequence Optimization for Multiple Asteroids Rendezvous via Cluster Analysis and Probability-Based Beam Search.Science China Technological Sciences, 64(1):122–130, 2021
work page 2021
-
[31]
The Asteroid Routing Problem: A Benchmark for Expensive Black-Box Permutation Optimization
L´ opez-Ib´ a˜ nez Manuel, Francisco Chicano, and Rodrigo Gil-Merino. The Asteroid Routing Problem: A Benchmark for Expensive Black-Box Permutation Optimization. InInternational Conference on the Applications of Evolutionary Computation (part of EvoStar), 2022, proceedings., pages 124–140. Springer
work page 2022
-
[32]
Luke Marshall, Natashia Boland, Martin W. P. Savelsbergh, and Mike Hewitt. Interval-Based Dy- namic Discretization Discovery for Solving the Continuous-Time Service Network Design Problem. Transp. Sci., 55(1):29–51, 2021.doi:10.1287/TRSC.2020.0994
-
[33]
Generating Subtour Elimination Constraints for the TSP From Pure Integer Solutions.Central Eur
Ulrich Pferschy and Rostislav Stanek. Generating Subtour Elimination Constraints for the TSP From Pure Integer Solutions.Central Eur. J. Oper. Res., 25(1):231–260, 2017.doi:10.1007/ S10100-016-0437-8
work page 2017
-
[34]
Marc D Rayman, Thomas C Fraschetti, Carol A Raymond, and Christopher T Russell. Dawn: A Mission in Development for Exploration of Main Belt Asteroids Vesta and Ceres.Acta Astronautica, 58(11):605–616, 2006. 15
work page 2006
-
[35]
Sophia Saller, Jana Koehler, and Andreas Karrenbauer. A Systematic Review of Approximability Results for Traveling Salesman Problems leveraging the TSP-T3CO Definition Scheme.CoRR, abs/2311.00604, 2023.arXiv:2311.00604,doi:10.48550/ARXIV.2311.00604
-
[36]
Hong-Xin Shen, Ya-Zhong Luo, Yue-He Zhu, and An-Yi Huang. Dyson Sphere Building: On the Design of the GTOC11 Problem and Summary of the Results.Acta Astronautica, 202:889–898, 2023
work page 2023
-
[37]
Miguel-Angel Sicilia, Elena Garc´ ıa-Barriocanal, and Salvador S´ anchez-Alonso. Community Curation in Open Dataset Repositories: Insights from Zenodo.Procedia Computer Science, 106:54–60, 2017
work page 2017
-
[38]
Lu´ ıs F Sim˜ oes, Dario Izzo, Evert Haasdijk, and AE Eiben. Multi-Rendezvous Spacecraft Trajectory Optimization with Beam P-ACO.European Conference on Evolutionary Computation in Combina- torial Optimization, pages 141–156, 2017
work page 2017
-
[39]
Duc Minh Vu, Mike Hewitt, Natashia Boland, and Martin W. P. Savelsbergh. Dynamic Discretization Discovery for Solving the Time-Dependent Traveling Salesman Problem with Time Windows.Transp. Sci., 54(3):703–720, 2020.doi:10.1287/TRSC.2019.0911
-
[40]
Duc Minh Vu, Mike Hewitt, and Duc Duy Vu. Solving Time-Dependent Traveling Salesman Problem with Time Windows Under Generic Time-Dependent Travel Cost. InComputational Data and Social Networks - 12th International Conference, CSoNet 2023, Hanoi, Vietnam, December 11-13, 2023, Proceedings, volume 14479 ofLecture Notes in Computer Science, pages 210–221. Sp...
-
[41]
Jack Yarndley, Harry Holt, and Roberto Armellin. Multi-Target Spacecraft Mission Design using Convex Optimization and Binary Integer Programming.Astrodynamics, 10(1):139–163, 2026.doi: 10.1007/s42064-025-0274-4
-
[42]
Jia-cheng Zhang, Yue-he Zhu, and Ya-zhong Luo. Hierarchical Spatiotemporal Tree Search Method for Planning Multi-Asteroid Successive Rendezvous.Journal of Guidance, Control, and Dynamics, pages 1–10, 2025
work page 2025
-
[43]
Nan Zhang, Zhong Zhang, and Hexi Baoyin. Timeline Club: An Optimization Algorithm for Solv- ing Multiple Debris Removal Missions of the Time-Dependent Traveling Salesman Problem Model. Astrodynamics, pages 1–16, 2022
work page 2022
-
[44]
Zhong Zhang, Nan Zhang, Zherui Chen, Fanghua Jiang, Hexi Baoyin, and Junfeng Li. Global Trajectory Optimization of Multispacecraft Successive Rendezvous Using Multitree Search.Journal of Guidance, Control, and Dynamics, 47(3):503–517, 2024
work page 2024
-
[45]
Zhong Zhang, Nan Zhang, Xiang Guo, Di Wu, Xuan Xie, Jinyuan Li, Jia Yang, Shiyu Chen, Fanghua Jiang, Hexi Baoyin, et al. Gtoc 11: Results from Tsinghua University and Shanghai Institute of Satellite Engineering.Acta Astronautica, 202:819–828, 2023
work page 2023
-
[46]
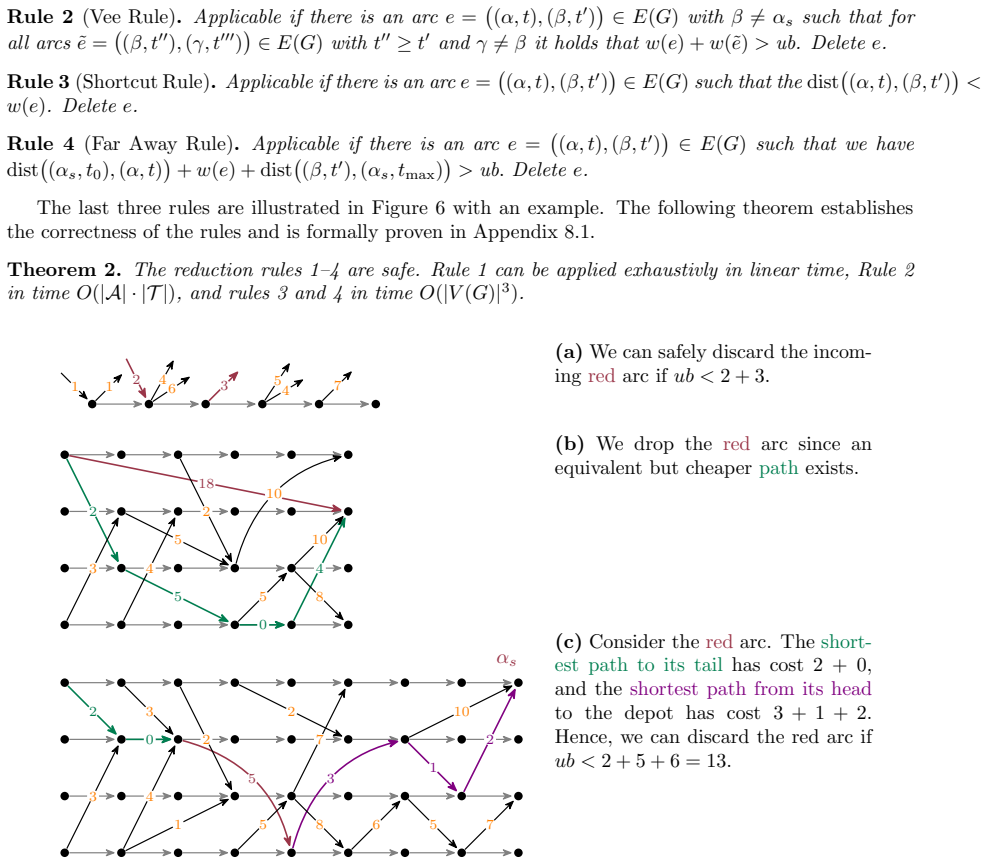
-pp” means that the preprocessing of Section 4.1 is applied before the solver is invoked; “-init
Zhong Zhang, Nan Zhang, Xiang Guo, Di Wu, Xuan Xie, Jia Yang, Fanghua Jiang, and Hexi Baoyin. Sustainable Asteroid Mining: On the Design of GTOC12 Problem and Summary of Results. Astrodynamics, 9(1):3–17, 2025. 16 8 Technical Appendix 8.1 Proof of Theorem 2 We prove the theorem in the form of four lemmas, each establishing the correctness and running time...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.