Uncertainty Quantification Methods for Optimal Excitation Design in Parameter Identification
Pith reviewed 2026-05-08 16:45 UTC · model grok-4.3
The pith
Optimal excitations for parameter identification are designed by maximizing global sensitivity of target parameters using two new uncertainty quantification techniques.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Optimal excitations are obtained by maximizing the global sensitivity of target parameters across the space of possible excitation functions; this optimization is made tractable by an intrusive polynomial chaos expansion surrogate for systems with known structure and by a novel non-intrusive sensitivity measure that employs Wasserstein distances to compare output distributions without reference to internal equations, yielding excitations with higher information content for parameter estimation as validated on vehicle dynamics models.
What carries the argument
Global sensitivity maximization over excitation functions, evaluated either by intrusive polynomial chaos expansion surrogates or by non-intrusive Wasserstein-distance comparisons of output distributions.
If this is right
- Sensitivity evaluation becomes fast enough to embed inside an outer optimization loop over excitation functions.
- The non-intrusive Wasserstein method extends optimal excitation design to black-box simulation codes that cannot be modified.
- Both approaches lower the experimental effort needed to reach reliable parameter values in engineering models.
- Vehicle-dynamics identification improves measurably when the designed excitations replace standard test signals.
Where Pith is reading between the lines
- The Wasserstein-based sensitivity could be paired with existing gradient-free optimizers to handle even larger excitation spaces.
- The same sensitivity-maximization idea may transfer directly to excitation design for parameter identification in robotics or chemical process models.
- Real-time adaptation of the excitation during an ongoing experiment could be built on top of the non-intrusive distance measure.
Load-bearing premise
Maximizing the global sensitivity of the target parameters across possible excitations will produce signals that contain enough information for reliable and accurate parameter estimation.
What would settle it
A controlled simulation or vehicle experiment in which excitations selected by the proposed sensitivity-maximization procedure produce parameter estimates whose accuracy is no better than, or worse than, estimates obtained from conventional or random excitations.
Figures









read the original abstract
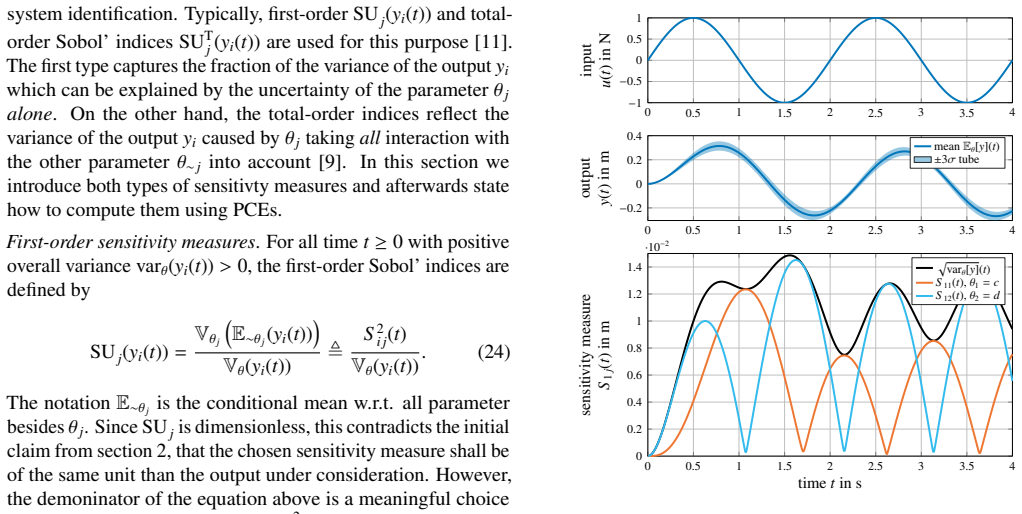
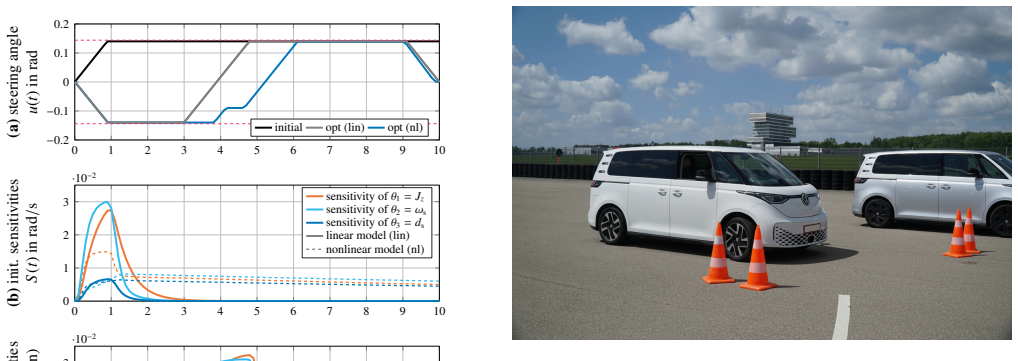
Parameter identification is crucial in virtual engineering processes, yet determining appropriate system excitations for identifying specific parameters remains challenging. In practice, extensive experimental programs often fail to generate data with sufficient information content for reliable parameter estimation. This work presents a systematic approach for deriving optimal excitations by maximizing the global sensitivity of target parameters across the space of possible excitation functions. To address the computational challenge of sensitivity evaluation during optimization, we develop two complementary approaches based on uncertainty quantification (UQ) methods. For systems with known mathematical structure, we present an intrusive polynomial chaos expansion (PCE) method that constructs deterministic surrogate models, enabling rapid sensitivity computation. For black-box models where intrusive approaches are not feasible, we introduce a novel non-intrusive method based on optimal transport theory, specifically using Wasserstein distances to quantify sensitivity measures without requiring knowledge of internal system dynamics. Both methods significantly reduce computational costs, making optimal excitation design practical for complex engineering systems. We demonstrate the effectiveness of both approaches on vehicle dynamics models, showing substantial improvements in parameter identification capability. The benefit for parameter identification is further validated experimentally on a test vehicle and compared to the state of the art.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops two UQ-based methods to optimize system excitations for parameter identification by maximizing global sensitivity of target parameters. For models with known structure, an intrusive PCE surrogate enables fast deterministic sensitivity computation; for black-box models, a non-intrusive Wasserstein-distance approach from optimal transport quantifies sensitivities without internal dynamics. Both reduce computational cost relative to direct Monte Carlo. Effectiveness is demonstrated on vehicle-dynamics models, with experimental validation on a test vehicle claiming substantial gains over state-of-the-art excitations.
Significance. If the chosen sensitivity indices are shown to be monotonically related to reduced posterior variance or estimator covariance, the work would provide a practical, computationally tractable framework for excitation design in engineering systems where exhaustive testing is infeasible. The dual intrusive/non-intrusive formulation is a clear strength, offering flexibility across modeling regimes while leveraging established PCE and optimal-transport tools.
major comments (3)
- [§3 and §4] §3 (PCE method) and §4 (Wasserstein method): the central claim that maximizing the global sensitivity index (Sobol-type or Wasserstein distance between output measures) produces excitations with sufficient information content for reliable parameter estimation is not supported by a derivation or inequality relating the index to the reduction in posterior covariance or Fisher information. When parameters are correlated or the output map is nonlinear, this equivalence does not hold in general; no counter-example check or bounding argument is supplied.
- [§5.3] §5.3 (vehicle-dynamics demonstrations) and experimental section: only increases in the sensitivity index are reported for the optimized excitations. No direct metrics of identification quality—such as RMSE of recovered parameters, condition number of the estimator covariance, or posterior variance reduction—are provided for the optimized versus baseline excitations, leaving the claimed improvement in parameter identification unverified.
- [§4.2] §4.2 (non-intrusive Wasserstein formulation): the sensitivity measure is defined via Wasserstein distance between output distributions, yet the manuscript does not address how this distance behaves under non-Gaussian measurement noise or when the parameter-to-output map exhibits trade-offs; the optimization may therefore select excitations that are sensitive but do not resolve the target parameters.
minor comments (3)
- [§2] Notation for the excitation function space and the sensitivity functional is introduced without a compact summary table; a single table collecting definitions would improve readability.
- [experimental validation] The experimental validation section references 'state of the art' without citing the specific prior excitation-design methods used for comparison.
- [§5] Figure captions for the vehicle-dynamics results do not state the number of Monte Carlo samples or PCE order used, making reproducibility difficult.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. These have highlighted important aspects regarding the theoretical justification and empirical validation of our methods. We address each major comment point by point below, indicating the revisions we will incorporate.
read point-by-point responses
-
Referee: [§3 and §4] §3 (PCE method) and §4 (Wasserstein method): the central claim that maximizing the global sensitivity index (Sobol-type or Wasserstein distance between output measures) produces excitations with sufficient information content for reliable parameter estimation is not supported by a derivation or inequality relating the index to the reduction in posterior covariance or Fisher information. When parameters are correlated or the output map is nonlinear, this equivalence does not hold in general; no counter-example check or bounding argument is supplied.
Authors: We acknowledge that the manuscript does not contain a rigorous derivation or inequality that directly equates maximization of the chosen global sensitivity indices to reductions in posterior covariance or the Fisher information matrix. The approach is motivated by the widespread use of sensitivity-based criteria in optimal experimental design literature as practical proxies for identifiability. We agree that this proxy relationship requires explicit caveats for correlated parameters and nonlinear maps. In the revision we will add a dedicated discussion subsection (in §3 and §4) that (i) cites relevant sensitivity-based design references, (ii) provides a simple analytical bounding argument under additive Gaussian noise and linear output maps, and (iii) includes a brief counter-example illustrating the breakdown when strong correlations or nonlinearities are present. revision: yes
-
Referee: [§5.3] §5.3 (vehicle-dynamics demonstrations) and experimental section: only increases in the sensitivity index are reported for the optimized excitations. No direct metrics of identification quality—such as RMSE of recovered parameters, condition number of the estimator covariance, or posterior variance reduction—are provided for the optimized versus baseline excitations, leaving the claimed improvement in parameter identification unverified.
Authors: The current demonstrations emphasize the increase in sensitivity indices, while the experimental section reports improved parameter recovery relative to state-of-the-art excitations. To directly verify the identification-quality claim, we will augment §5.3 and the experimental results with the requested metrics: RMSE of recovered parameters, condition numbers of the estimator covariance matrices, and estimated posterior variance reductions, all computed for the optimized excitations versus the baseline and state-of-the-art cases. revision: yes
-
Referee: [§4.2] §4.2 (non-intrusive Wasserstein formulation): the sensitivity measure is defined via Wasserstein distance between output distributions, yet the manuscript does not address how this distance behaves under non-Gaussian measurement noise or when the parameter-to-output map exhibits trade-offs; the optimization may therefore select excitations that are sensitive but do not resolve the target parameters.
Authors: The Wasserstein distance quantifies discrepancy between output distributions induced by parameter perturbations and is in principle compatible with any noise distribution for which the push-forward measures can be estimated. We agree that the manuscript does not explicitly examine robustness to non-Gaussian noise or the effect of parameter trade-offs. In the revision we will expand §4.2 with a short analysis of these issues and add a numerical illustration (using the same vehicle model) that compares the selected excitations under Gaussian versus heavy-tailed noise and under a deliberately introduced parameter trade-off. revision: yes
Circularity Check
No significant circularity; derivation uses independent UQ constructions
full rationale
The paper defines optimal excitations via maximization of global sensitivity indices computed either through intrusive PCE surrogate models or non-intrusive Wasserstein distances on output measures. These are presented as applications of established UQ and optimal transport tools to the excitation-design problem. No equation reduces the target information content or posterior variance to the chosen sensitivity index by definition, no fitted parameter is relabeled as a prediction, and no load-bearing premise rests solely on self-citation. The assumption that sensitivity maximization yields informative excitations is stated as a modeling choice rather than derived from the method itself.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Prentice Hall, Upper Saddle River, NJ, 2nd edition, 1999
Lennart Ljung.System identification: theory for the user. Prentice Hall, Upper Saddle River, NJ, 2nd edition, 1999
work page 1999
-
[2]
Raman Mehra. Optimal input signals for parameter estimation in dynamic systems–Survey and new results.IEEE Transactions on Automatic Control, 19(6):753–768, 2003
work page 2003
-
[3]
John Wiley & Sons, Hoboken, NJ, 2017
Johan Schoukens, Rik Pintelon, and Yves Rolain.Mastering system identification in 100 exercises. John Wiley & Sons, Hoboken, NJ, 2017
work page 2017
-
[4]
Academic Press, San Diego, CA, 2001
Douglas F Elliott and K Ramamohan Rao.Signals and systems. Academic Press, San Diego, CA, 2001
work page 2001
-
[5]
John Wiley & Sons, Hoboken, NJ, 2nd edition, 2012
Rik Pintelon and Johan Schoukens.System identification: a frequency domain approach. John Wiley & Sons, Hoboken, NJ, 2nd edition, 2012
work page 2012
-
[6]
Michel Gevers and Lennart Ljung. Optimal experiment design with respect to the intended model application.Automatica, 22:543–554, 1986
work page 1986
-
[7]
Academic Press, New York, NY , 1972
Valerii Vasilievich Fedorov.Theory of optimal experiments. Academic Press, New York, NY , 1972
work page 1972
-
[8]
Oxford University Press, Oxford, UK, 2007
Anthony Atkinson, Alexander Donev, and Randall Tobias.Optimum Experimental Designs, With SAS. Oxford University Press, Oxford, UK, 2007
work page 2007
-
[9]
Global sensitivity analysis: the primer
Andrea Saltelli, Marco Ratto, Terry Andres, Francesca Campolongo, Jes- sica Cariboni, Debora Gatelli, Michaela Saisana, and Stefano Tarantola. Global sensitivity analysis: the primer. John Wiley & Sons, 2008
work page 2008
-
[10]
Springer Science & Business Media, 2010
Olivier Le Maître and Omar M Knio.Spectral methods for uncer- tainty quantification: with applications to computational fluid dynamics. Springer Science & Business Media, 2010
work page 2010
-
[11]
Bruno Sudret. Global sensitivity analysis using polynomial chaos expan- sions.Reliability engineering&system safety, 93(7):964–979, 2008
work page 2008
-
[12]
Optimal experimental design for probabilistic model discrimination using polynomial chaos
Stefan Streif, Felix Petzke, Ali Mesbah, Rolf Findeisen, and Richard D Braatz. Optimal experimental design for probabilistic model discrimination using polynomial chaos. InProc. IFAC world congress, pages 4103–4109, 2014
work page 2014
-
[13]
Joel A Paulson and Ali Mesbah. An efficient method for stochastic optimal control with joint chance constraints for nonlinear systems.International Journal of Robust and Nonlinear Control, 29(15):5017–5037, 2019
work page 2019
-
[14]
Stability for receding- horizon stochastic model predictive control
Joel A Paulson, Stefan Streif, and Ali Mesbah. Stability for receding- horizon stochastic model predictive control. InProc. American Control Conference (ACC), pages 937–943. IEEE, 2015
work page 2015
-
[15]
James Robert Fisher.Stability analysis and control of stochastic dynamic systems using polynomial chaos. Texas A&M University, 2008
work page 2008
-
[16]
Thomas P Ryan.Modern experimental design. Wiley, Hoboken, NJ, 2003
work page 2003
-
[17]
Bayesian experimental design: a review.Statistical Science, 10(3):273–304, 1995
Kathryn Chaloner and Isabella Verdinelli. Bayesian experimental design: a review.Statistical Science, 10(3):273–304, 1995
work page 1995
-
[18]
Stefano Conti and Anthony O’Hagan. Bayesian emulation of complex multi-output and dynamic computer models.Journal of Statistical Plan- ning and Inference, 140(3):640–651, 2014
work page 2014
-
[19]
Sensitivity estimates for nonlinear mathematical models.Math
Ilya Meyerovich Sobo´l. Sensitivity estimates for nonlinear mathematical models.Math. Model. Comput. Exp., 1(4):407–414, 1993
work page 1993
-
[20]
Giuseppe Carlo Calafiore and L El Ghaoui. On distributionally robust chance-constrained linear programs.Journal of Optimization Theory and Applications, 130(1):1–22, 2006
work page 2006
-
[21]
Multivariate chebyshev inequalities
Albert W Marshall and Ingram Olkin. Multivariate chebyshev inequalities. The Annals of Mathematical Statistics, pages 1001–1014, 1960
work page 1960
-
[22]
Bruno Sudret. Polynomial chaos expansions and stochastic finite element methods.Risk and reliability in geotechnical engineering, pages 265–300, 2014
work page 2014
-
[23]
The homogeneous chaos.American Journal of Mathe- matics, 60(4):897–936, 1938
Norbert Wiener. The homogeneous chaos.American Journal of Mathe- matics, 60(4):897–936, 1938
work page 1938
-
[24]
Dongbin Xiu and George Em Karniadakis. The Wiener–Askey polynomial chaos for stochastic differential equations.SIAM journal on scientific computing, 24(2):619–644, 2002
work page 2002
-
[25]
Tillmann Mühlpfordt, Rolf Findeisen, Veit Hagenmeyer, and Timm Faulwasser. Comments on truncation errors for polynomial chaos ex- pansions.IEEE Control Systems Letters, 2(1):169–174, 2017
work page 2017
- [26]
-
[27]
Matthias Gelbrich. On a formula for the L2 Wasserstein metric between measures on Euclidean and Hilbert spaces.Mathematische Nachrichten, 147(1):185–203, 1990
work page 1990
-
[28]
Donald Bures. An extension of kakutani’s theorem on infinite product measures to the tensor product of semifinite w*-algebras.Transactions of the American Mathematical Society, 135:199–212, 1969
work page 1969
-
[29]
Global sensitivity analysis via optimal transport.Management Science, 2024
Emanuele Borgonovo, Alessio Figalli, Elmar Plischke, and Giuseppe Savaré. Global sensitivity analysis via optimal transport.Management Science, 2024
work page 2024
-
[30]
Survey of numerical methods for trajectory optimization
John T Betts. Survey of numerical methods for trajectory optimization. Journal of guidance, control, and dynamics, 21:193–207, 1998
work page 1998
-
[31]
Princeton university press, 2011
Daniel Liberzon.Calculus of variations and optimal control theory: a concise introduction. Princeton university press, 2011
work page 2011
-
[32]
Michel Gevers, Xavier Bombois, Benoit Codrons, Gérard Scorletti, and Brian DO Anderson. Optimal experiment design with respect to the intended model application.Automatica, 41:1159–1167, 2005
work page 2005
-
[33]
Rida T Farouki and VT Rajan. On the numerical condition of polynomials in bernstein form.Computer Aided Geometric Design, 4(3):191–216, 1987
work page 1987
-
[34]
Rainer Storn and Kenneth Price. Differential evolution–a simple and efficient heuristic for global optimization over continuous spaces.Journal of Global Optimization, 11(4):341–359, 1997
work page 1997
-
[35]
Jasper Snoek, Hugo Larochelle, and Ryan P Adams. Practical bayesian op- timization of machine learning algorithms.Advances in neural information processing systems, 25, 2012
work page 2012
-
[36]
Pauli Virtanen, Ralf Gommers, Travis E Oliphant, Matt Haberland, Tyler Reddy, David Cournapeau, Evgeni Burovski, Pearu Peterson, Warren Weckesser, Jonathan Bright, et al. SciPy 1.0: fundamental algorithms for scientific computing in Python.Nature Methods, 17(3):261–272, 2020
work page 2020
-
[37]
Paolo Falcone, Francesco Borrelli, Jahan Asgari, H. Eric Tseng, and Davor Hrovat. Predictive Active Steering Control for Autonomous Vehicle 16 Systems.IEEE Transactions on Control Systems Technology, 15:566–580, 2007
work page 2007
-
[38]
A. T. van Zanten. Bosch ESP Systems: 5 Years of Experience.SAE Transactions, 109:428–436, 2000
work page 2000
-
[39]
Jarrod M. Snider. Automatic Steering Methods for Autonomous Auto- mobile Path Tracking.Robotics Institute, Carnegie Mellon University, 2009
work page 2009
- [40]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.