Recognition: no theorem link
PolarVSR: A Unified Framework and Benchmark for Continuous Space-Time Polarization Video Reconstruction
Pith reviewed 2026-05-12 05:21 UTC · model grok-4.3
The pith
The first architecture reconstructs polarization videos continuously across space and time from DoFP captures.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
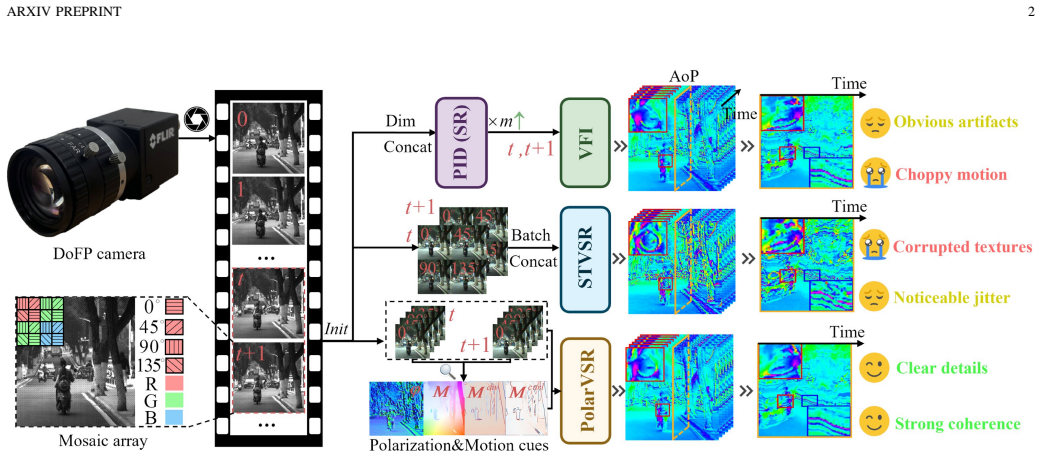
We propose the first space-time polarization video reconstruction architecture. The method jointly models polarization directions in space and time and uses a polarization-aware implicit neural representation for continuous, high-fidelity upsampling. By analyzing temporal variations in polarization parameters, we further introduce a flow-guided polarization variation loss to supervise polarization dynamics. We also establish the first large-scale color DoFP polarization video benchmark to support this research direction.
What carries the argument
polarization-aware implicit neural representation for jointly modeling polarization directions in space and time
If this is right
- Enables continuous upsampling of polarization parameters to arbitrary resolutions in space and time.
- Allows supervision of polarization dynamics via a flow-guided variation loss.
- Establishes a benchmark for space-time polarization video reconstruction research.
- Shows effectiveness through experiments on the new dataset.
Where Pith is reading between the lines
- This method might apply to reconstructing other multi-dimensional sensor data from mosaic arrays.
- It could support real-world applications in material identification during motion if the benchmark generalizes.
- Future tests on datasets with extreme dynamics could help identify where the implicit representation needs improvement.
Load-bearing premise
The polarization-aware implicit neural representation and flow-guided polarization variation loss will generalize to real-world dynamic scenes beyond the new benchmark.
What would settle it
A comparison showing large discrepancies in reconstructed DoLP and AoP values on a new collection of high-speed polarization videos with ground truth.
Figures







read the original abstract
Polarimetric imaging captures surface polarization characteristics, such as the Degree of Linear Polarization (DoLP) and the Angle of Polarization (AoP). In mainstream Division of-Focal-Plane (DoFP) color polarization imaging, recovering polarization parameters from captured mosaic arrays remains a challenging inverse problem. Existing DoFP cameras also face hardware bottlenecks and often cannot support high-frame-rate acquisition, limiting polarimetric imaging in dynamic video tasks. These limitations motivate joint spatial and temporal enhancement. To this end, we propose the first space-time polarization video reconstruction architecture. The method jointly models polarization directions in space and time and uses a polarization-aware implicit neural representation for continuous, high-fidelity upsampling. By analyzing temporal variations in polarization parameters, we further introduce a flow-guided polarization variation loss to supervise polarization dynamics. We also establish the first large-scale color DoFP polarization video benchmark to support this research direction. Extensive experiments on this benchmark demonstrate the effectiveness of the method.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes PolarVSR, the first space-time polarization video reconstruction architecture for DoFP color polarization videos. It jointly models polarization directions in space and time via a polarization-aware implicit neural representation for continuous high-fidelity upsampling, introduces a flow-guided polarization variation loss to supervise temporal dynamics, establishes the first large-scale color DoFP polarization video benchmark, and validates the approach via extensive experiments on that benchmark.
Significance. If the results hold, the work addresses a clear gap in dynamic polarimetric imaging by enabling joint spatial-temporal enhancement beyond hardware limits of DoFP sensors. The new benchmark is a valuable, reusable contribution that can anchor future research. The polarization-aware INR and flow-guided loss are direct, technically motivated adaptations that integrate polarization-specific cues with continuous representations; these choices are strengths when paired with the dataset release.
major comments (1)
- [Experiments section] Experiments section: the method and all reported comparisons are evaluated exclusively on the newly introduced benchmark. This setup creates a generalization risk for the claim that the architecture demonstrates effectiveness, as the benchmark may not capture the full range of real-world dynamic polarization scenes (e.g., varying lighting, materials, or motion types). Independent test sets or cross-dataset evaluation would be needed to support broader claims.
minor comments (2)
- [Abstract] Abstract: the statement that 'extensive experiments demonstrate the effectiveness' would be strengthened by naming the primary metrics, number of baselines, and key quantitative gains.
- [Method] Method description: the precise encoding of DoLP/AoP and Stokes parameters inside the polarization-aware INR is not fully detailed; adding a short equation or diagram would improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the positive summary, recognition of the benchmark's value, and recommendation for minor revision. We address the single major comment below.
read point-by-point responses
-
Referee: Experiments section: the method and all reported comparisons are evaluated exclusively on the newly introduced benchmark. This setup creates a generalization risk for the claim that the architecture demonstrates effectiveness, as the benchmark may not capture the full range of real-world dynamic polarization scenes (e.g., varying lighting, materials, or motion types). Independent test sets or cross-dataset evaluation would be needed to support broader claims.
Authors: We agree that exclusive evaluation on the new benchmark carries a generalization risk, as no prior public color DoFP polarization video datasets exist for this task. The benchmark was deliberately constructed with diverse scenes spanning multiple lighting conditions, material types, and motion patterns to reduce this risk, but it cannot claim exhaustive coverage of all real-world variations. In the revised manuscript we will add an explicit limitations paragraph in the Experiments section (and a brief note in the Conclusion) acknowledging this point and stating that future cross-dataset validation will be essential once additional datasets are released. This revision clarifies the scope of our claims without altering the experimental results or core contributions. revision: partial
Circularity Check
No significant circularity in derivation chain
full rationale
The paper introduces a polarization-aware implicit neural representation and flow-guided polarization variation loss as novel components to address stated DoFP video limitations, along with a new benchmark for evaluation. No equations, self-citations, or claims in the provided abstract and description reduce any prediction or result to fitted inputs or prior self-referential definitions by construction. The technical choices are presented as independent responses to hardware and inverse-problem challenges, making the derivation self-contained without load-bearing circular steps.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Cpifuse: Toward realistic color and enhanced textures in color polarization image fusion,
Y . Luo, J. Zhang, and C. Li, “Cpifuse: Toward realistic color and enhanced textures in color polarization image fusion,”Information Fusion, vol. 120, p. 103111, 2025
work page 2025
-
[2]
Sharecmp: Polarization- aware rgb-p semantic segmentation,
Z. Liu, B. Wang, L. Wang, C. Mao, and Y . Li, “Sharecmp: Polarization- aware rgb-p semantic segmentation,”IEEE Transactions on Circuits and Systems for Video Technology, 2025
work page 2025
-
[3]
Polarfree: Polarization-based reflection-free imaging,
M. Yao, M. Wang, K.-M. Tam, L. Li, T. Xue, and J. Gu, “Polarfree: Polarization-based reflection-free imaging,” inProceedings of the Com- puter Vision and Pattern Recognition Conference, 2025, pp. 10 890– 10 899
work page 2025
-
[4]
Physics-guided reflec- tion separation from a pair of unpolarized and polarized images,
Y . Lyu, Z. Cui, S. Li, M. Pollefeys, and B. Shi, “Physics-guided reflec- tion separation from a pair of unpolarized and polarized images,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 45, no. 2, pp. 2151–2165, 2022
work page 2022
-
[5]
Polarized reflection removal with perfect alignment in the wild,
C. Lei, X. Huang, M. Zhang, Q. Yan, W. Sun, and Q. Chen, “Polarized reflection removal with perfect alignment in the wild,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020, pp. 1750–1758
work page 2020
-
[6]
Deep polarization imaging for 3d shape and svbrdf acquisition,
V . Deschaintre, Y . Lin, and A. Ghosh, “Deep polarization imaging for 3d shape and svbrdf acquisition,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021, pp. 15 567–15 576
work page 2021
-
[7]
Shape from polarization with distant lighting estimation,
Y . Lyu, L. Zhao, S. Li, and B. Shi, “Shape from polarization with distant lighting estimation,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 45, no. 11, pp. 13 991–14 004, 2023
work page 2023
-
[8]
Shape from polarization for complex scenes in the wild,
C. Lei, C. Qi, J. Xie, N. Fan, V . Koltun, and Q. Chen, “Shape from polarization for complex scenes in the wild,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 12 632–12 641
work page 2022
-
[9]
D. Chen, H. Zheng, J. Fang, X. Dong, X. Li, W. Liao, T. He, P. Peng, and J. Shen, “Rethinking temporal fusion with a unified gradient descent view for 3d semantic occupancy prediction,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2025, pp. 1505–1515
work page 2025
-
[10]
6d object pose tracking in internet videos for robotic manipulation,
G. Ponimatkin, M. C ´ıfka, T. Souˇcek, M. Fourmy, Y . Labb ´e, V . Petrik, and J. Sivic, “6d object pose tracking in internet videos for robotic manipulation,”arXiv preprint arXiv:2503.10307, 2025
-
[11]
W. Hong, Y . Cheng, Z. Yang, W. Wang, L. Wang, X. Gu, S. Huang, Y . Dong, and J. Tang, “Motionbench: Benchmarking and improving fine- grained video motion understanding for vision language models,” inPro- ceedings of the Computer Vision and Pattern Recognition Conference, 2025, pp. 8450–8460
work page 2025
-
[12]
Slam3r: Real-time dense scene reconstruction from monocular rgb videos,
Y . Liu, S. Dong, S. Wang, Y . Yin, Y . Yang, Q. Fan, and B. Chen, “Slam3r: Real-time dense scene reconstruction from monocular rgb videos,” inProceedings of the Computer Vision and Pattern Recognition Conference, 2025, pp. 16 651–16 662
work page 2025
-
[13]
Principle investigations on polarization image sensors,
D. Rebhan, M. Rosenberger, and G. Notni, “Principle investigations on polarization image sensors,” inPhotonics and Education in Measurement Science 2019, vol. 11144. SPIE, 2019, pp. 50–54
work page 2019
-
[14]
Collett,Field guide to polarization
E. Collett,Field guide to polarization. SPIE press Bellingham, 2005, vol. 15
work page 2005
-
[15]
Pidsr: Complementary polarized image demosaicing and super-resolution,
S. Zhou, C. Zhou, Y . Lyu, H. Guo, Z. Ma, B. Shi, and I. Sato, “Pidsr: Complementary polarized image demosaicing and super-resolution,” in Proceedings of the Computer Vision and Pattern Recognition Confer- ence, 2025, pp. 16 081–16 090
work page 2025
-
[16]
Polarization video frame interpolation for 3d human pose reconstruction with attention mechanism,
X. Zhang, X. Wang, Y . Xu, X. Wu, and F. Huang, “Polarization video frame interpolation for 3d human pose reconstruction with attention mechanism,”Optics and Lasers in Engineering, vol. 193, p. 109046, 2025
work page 2025
-
[17]
Videoinr: Learning video implicit neural representation for continuous space-time super-resolution,
Z. Chen, Y . Chen, J. Liu, X. Xu, V . Goel, Z. Wang, H. Shi, and X. Wang, “Videoinr: Learning video implicit neural representation for continuous space-time super-resolution,” inProceedings of the IEEE/CVF Confer- ence on Computer Vision and Pattern Recognition, 2022, pp. 2047–2057
work page 2022
-
[18]
Y .-H. Chen, S.-C. Chen, Y .-Y . Lin, and W.-H. Peng, “Motif: Learning motion trajectories with local implicit neural functions for continuous space-time video super-resolution,” inProceedings of the IEEE/CVF International Conference on Computer Vision, 2023, pp. 23 131–23 141
work page 2023
-
[19]
E. Kim, H. Kim, K. H. Jin, and J. Yoo, “Bf-stvsr: B-splines and fourier— best friends for high fidelity spatial-temporal video super-resolution,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2025, pp. 28 009–28 018
work page 2025
-
[20]
M. Jaderberg, K. Simonyan, A. Zissermanet al., “Spatial transformer networks,”Advances in Neural Information Processing Systems, vol. 28, 2015
work page 2015
-
[21]
Softmax splatting for video frame interpolation,
S. Niklaus and F. Liu, “Softmax splatting for video frame interpolation,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020, pp. 5437–5446
work page 2020
-
[22]
Sea-raft: Simple, efficient, accurate raft for optical flow,
Y . Wang, L. Lipson, and J. Deng, “Sea-raft: Simple, efficient, accurate raft for optical flow,” inProceedings of the European Conference on Computer Vision, 2024, pp. 36–54
work page 2024
-
[23]
Monochrome and color polarization demosaicking using edge-aware residual interpo- lation,
M. Morimatsu, Y . Monno, M. Tanaka, and M. Okutomi, “Monochrome and color polarization demosaicking using edge-aware residual interpo- lation,” inIEEE International Conference on Image Processing. IEEE, 2020, pp. 2571–2575
work page 2020
-
[24]
Linear polarization demo- saicking for monochrome and colour polarization focal plane arrays,
S. Qiu, Q. Fu, C. Wang, and W. Heidrich, “Linear polarization demo- saicking for monochrome and colour polarization focal plane arrays,” inComputer Graphics Forum, vol. 40, no. 6. Wiley Online Library, 2021, pp. 77–89
work page 2021
-
[25]
Convolutional demosaicing network for joint chromatic and polarimetric imagery,
S. Wen, Y . Zheng, F. Lu, and Q. Zhao, “Convolutional demosaicing network for joint chromatic and polarimetric imagery,”Optics Letters, vol. 44, no. 22, pp. 5646–5649, 2019
work page 2019
-
[26]
Demosaicking customized diffusion model for snapshot polarization imaging,
C. Li, Y . Luo, C. Wu, J. Zhang, D. Yang, and D. Zhao, “Demosaicking customized diffusion model for snapshot polarization imaging,”Optics & Laser Technology, vol. 188, p. 112868, 2025. ARXIV PREPRINT 14
work page 2025
-
[27]
Po- larization denoising and demosaicking: Dataset and baseline method,
M. D. A. B. A. Rahman, Y . Monno, M. Tanaka, and M. Okutomi, “Po- larization denoising and demosaicking: Dataset and baseline method,” inIEEE International Conference on Image Processing. IEEE, 2025, pp. 2724–2729
work page 2025
-
[28]
Z. Zhu, X. Li, J. Zhai, and H. Hu, “Podb: A learning-based polari- metric object detection benchmark for road scenes in adverse weather conditions,”Information Fusion, vol. 108, p. 102385, 2024
work page 2024
-
[29]
Spectral and polarization vision: Spectro-polarimetric real-world dataset,
Y . Jeon, E. Choi, Y . Kim, Y . Moon, K. Omer, F. Heide, and S.-H. Baek, “Spectral and polarization vision: Spectro-polarimetric real-world dataset,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 22 098–22 108
work page 2024
-
[30]
Demosaicking dofp images using newton’s polynomial interpolation and polarization difference model,
N. Li, Y . Zhao, Q. Pan, and S. G. Kong, “Demosaicking dofp images using newton’s polynomial interpolation and polarization difference model,”Optics Express, vol. 27, no. 2, pp. 1376–1391, 2019
work page 2019
-
[31]
Polarization image demosaick- ing using polarization channel difference prior,
R. Wu, Y . Zhao, N. Li, and S. G. Kong, “Polarization image demosaick- ing using polarization channel difference prior,”Optics Express, vol. 29, no. 14, pp. 22 066–22 079, 2021
work page 2021
-
[32]
A sparse representation based joint demosaicing method for single-chip polarized color sensor,
S. Wen, Y . Zheng, and F. Lu, “A sparse representation based joint demosaicing method for single-chip polarized color sensor,”IEEE Transactions on Image Processing, vol. 30, pp. 4171–4182, 2021
work page 2021
-
[33]
Sparse representation-based demosaick- ing method for joint chromatic and polarimetric imagery,
Y . Luo, J. Zhang, and D. Tian, “Sparse representation-based demosaick- ing method for joint chromatic and polarimetric imagery,”Optics and Lasers in Engineering, vol. 164, p. 107526, 2023
work page 2023
-
[34]
Y . Luo, J. Zhang, J. Shao, J. Tian, and J. Ma, “Learning a non-locally regularized convolutional sparse representation for joint chromatic and polarimetric demosaicking,”IEEE Transactions on Image Processing, vol. 33, pp. 5029–5044, 2024
work page 2024
-
[35]
Learning a convolutional demosaicing network for microgrid polarime- ter imagery,
J. Zhang, J. Shao, H. Luo, X. Zhang, B. Hui, Z. Chang, and R. Liang, “Learning a convolutional demosaicing network for microgrid polarime- ter imagery,”Optics Letters, vol. 43, no. 18, pp. 4534–4537, 2018
work page 2018
-
[36]
Color polarization demosaicking by a convolutional neural network,
Y . Sun, J. Zhang, and R. Liang, “Color polarization demosaicking by a convolutional neural network,”Optics Letters, vol. 46, no. 17, pp. 4338–4341, 2021
work page 2021
-
[37]
Two-step color- polarization demosaicking network,
V . Nguyen, M. Tanaka, Y . Monno, and M. Okutomi, “Two-step color- polarization demosaicking network,” inIEEE International Conference on Image Processing, 2022, pp. 1011–1015
work page 2022
-
[38]
Y . Guo, X. Dai, S. Wang, G. Jin, and X. Zhang, “Attention-based pro- gressive discrimination generative adversarial networks for polarimetric image demosaicing,”IEEE Transactions on Computational Imaging, vol. 10, pp. 713–725, 2024
work page 2024
-
[39]
Polarization uncertainty- guided diffusion model for color polarization image demosaicking,
C. Li, Y . Luo, J. Zhang, and Y . Degui, “Polarization uncertainty- guided diffusion model for color polarization image demosaicking,” in Proceedings of the AAAI Conference on Artificial Intelligence, vol. 40, no. 8, 2026, pp. 6028–6036
work page 2026
-
[40]
Polarized image super-resolution via a deep convolutional neural network,
H. Hu, S. Yang, X. Li, Z. Cheng, T. Liu, and J. Zhai, “Polarized image super-resolution via a deep convolutional neural network,”Optics Express, vol. 31, no. 5, pp. 8535–8547, 2023
work page 2023
-
[41]
D. Yu, Q. Li, Z. Zhang, G. Huo, C. Xu, and Y . Zhou, “Color polarization image super-resolution reconstruction via a cross-branch supervised learning strategy,”Optics and Lasers in Engineering, vol. 165, p. 107469, 2023
work page 2023
-
[42]
Deep polarization reconstruction with pdavis events,
H. Mei, Z. Wang, X. Yang, X. Wei, and T. Delbruck, “Deep polarization reconstruction with pdavis events,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023, pp. 22 149–22 158
work page 2023
-
[43]
Benchmarking burst super-resolution for polarization images: Noise dataset and analysis,
I. Hwang, K. Choi, H. Ha, and M. H. Kim, “Benchmarking burst super-resolution for polarization images: Noise dataset and analysis,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2025, pp. 24 899–24 909
work page 2025
-
[44]
Implicit neural representations with periodic activation functions,
V . Sitzmann, J. Martel, A. Bergman, D. Lindell, and G. Wetzstein, “Implicit neural representations with periodic activation functions,” Advances in Neural Information Processing Systems, vol. 33, pp. 7462– 7473, 2020
work page 2020
-
[45]
Recovering realistic texture in image super-resolution by deep spatial feature transform,
X. Wang, K. Yu, C. Dong, and C. C. Loy, “Recovering realistic texture in image super-resolution by deep spatial feature transform,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2018, pp. 606–615
work page 2018
-
[46]
Basicvsr++: Improving video super-resolution with enhanced propagation and alignment,
K. C. Chan, S. Zhou, X. Xu, and C. C. Loy, “Basicvsr++: Improving video super-resolution with enhanced propagation and alignment,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 5972–5981
work page 2022
-
[47]
Quadratic video interpolation,
X. Xu, L. Siyao, W. Sun, Q. Yin, and M.-H. Yang, “Quadratic video interpolation,”Advances in Neural Information Processing Systems, vol. 32, 2019
work page 2019
-
[48]
Space-time-aware multi- resolution video enhancement,
M. Haris, G. Shakhnarovich, and N. Ukita, “Space-time-aware multi- resolution video enhancement,” inProceedings of the IEEE/CVF Con- ference on Computer Vision and Pattern Recognition, 2020, pp. 2859– 2868
work page 2020
-
[49]
Zooming slow-mo: Fast and accurate one-stage space-time video super- resolution,
X. Xiang, Y . Tian, Y . Zhang, Y . Fu, J. P. Allebach, and C. Xu, “Zooming slow-mo: Fast and accurate one-stage space-time video super- resolution,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020, pp. 3370–3379
work page 2020
-
[50]
Temporal modulation network for controllable space-time video super-resolution,
G. Xu, J. Xu, Z. Li, L. Wang, X. Sun, and M.-M. Cheng, “Temporal modulation network for controllable space-time video super-resolution,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021, pp. 6388–6397
work page 2021
-
[51]
arXiv preprint arXiv:2407.07667 (2024)
J. He, T. Xue, D. Liu, X. Lin, P. Gao, D. Lin, Y . Qiao, W. Ouyang, and Z. Liu, “Venhancer: Generative space-time enhancement for video generation,”arXiv preprint arXiv:2407.07667, 2024
-
[52]
Osdenhancer: Taming real-world space-time video super-resolution with one-step diffusion,
S. Wei, F. Li, C. Zhou, R. Cong, Y . Zhao, and H. Bai, “Osdenhancer: Taming real-world space-time video super-resolution with one-step diffusion,”arXiv preprint arXiv:2601.20308, 2026
-
[53]
Continuous space-time video super-resolution with 3d fourier fields,
A. Becker, J. Erbach, D. Narnhofer, and K. Schindler, “Continuous space-time video super-resolution with 3d fourier fields,”arXiv preprint arXiv:2509.26325, 2025
-
[54]
Polarized optical-flow gyroscope,
M. Tzabari and Y . Y . Schechner, “Polarized optical-flow gyroscope,” in Proceedings of the European Conference on Computer Vision, 2020, pp. 363–381
work page 2020
-
[55]
Learning continuous image representa- tion with local implicit image function,
Y . Chen, S. Liu, and X. Wang, “Learning continuous image representa- tion with local implicit image function,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021, pp. 8628–8638
work page 2021
-
[56]
Image neural field diffusion models,
Y . Chen, O. Wang, R. Zhang, E. Shechtman, X. Wang, and M. Gharbi, “Image neural field diffusion models,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 8007–8017
work page 2024
-
[57]
arXiv preprint arXiv:2212.00490 , year=
Y . Wang, J. Yu, and J. Zhang, “Zero-shot image restoration using denoising diffusion null-space model,”arXiv preprint arXiv:2212.00490, 2022
-
[58]
Blind image restoration via fast diffusion inversion,
H. Chihaoui, A. Lemkhenter, and P. Favaro, “Blind image restoration via fast diffusion inversion,”Advances in Neural Information Processing Systems, vol. 37, pp. 34 513–34 532, 2024
work page 2024
-
[59]
Diffusion Posterior Sampling for General Noisy Inverse Problems
H. Chung, J. Kim, M. T. Mccann, M. L. Klasky, and J. C. Ye, “Diffusion posterior sampling for general noisy inverse problems,”arXiv preprint arXiv:2209.14687, 2022
work page internal anchor Pith review arXiv 2022
-
[60]
Image super-resolution via iterative refinement,
C. Saharia, J. Ho, W. Chan, T. Salimans, D. J. Fleet, and M. Norouzi, “Image super-resolution via iterative refinement,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 45, no. 4, pp. 4713– 4726, 2022
work page 2022
-
[61]
Invertible diffusion models for compressed sensing,
B. Chen, Z. Zhang, W. Li, C. Zhao, J. Yu, S. Zhao, J. Chen, and J. Zhang, “Invertible diffusion models for compressed sensing,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 47, no. 5, pp. 3992– 4006, 2025
work page 2025
-
[62]
Deformable convnets v2: More deformable, better results,
X. Zhu, H. Hu, S. Lin, and J. Dai, “Deformable convnets v2: More deformable, better results,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019, pp. 9308–9316
work page 2019
-
[63]
Learning blind video temporal consistency,
W.-S. Lai, J.-B. Huang, O. Wang, E. Shechtman, E. Yumer, and M.-H. Yang, “Learning blind video temporal consistency,” inProceedings of the European Conference on Computer Vision, 2018, pp. 170–185
work page 2018
-
[64]
J. J. Koenderink, “The structure of images,”Biological Cybernetics, vol. 50, no. 5, pp. 363–370, 1984
work page 1984
-
[65]
K. He, J. Sun, and X. Tang, “Guided image filtering,”IEEE transactions on pattern analysis and machine intelligence, vol. 35, no. 6, pp. 1397– 1409, 2012
work page 2012
-
[66]
Pca- based denoising method for division of focal plane polarimeters,
J. Zhang, H. Luo, R. Liang, W. Zhou, B. Hui, and Z. Chang, “Pca- based denoising method for division of focal plane polarimeters,”Optics Express, vol. 25, no. 3, pp. 2391–2400, 2017
work page 2017
-
[67]
Atd: Improved transformer with adaptive token dictionary for image restoration,
L. Zhang, W. Long, Y . Li, X. Zhou, X. Zhao, and S. Gu, “Atd: Improved transformer with adaptive token dictionary for image restoration,”IEEE Transactions on Pattern Analysis and Machine Intelligence, 2026
work page 2026
-
[68]
Video frame interpolation with transformer,
L. Lu, R. Wu, H. Lin, J. Lu, and J. Jia, “Video frame interpolation with transformer,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 3532–3542
work page 2022
-
[69]
Super slomo: High quality estimation of multiple intermediate frames for video interpolation,
H. Jiang, D. Sun, V . Jampani, M.-H. Yang, E. Learned-Miller, and J. Kautz, “Super slomo: High quality estimation of multiple intermediate frames for video interpolation,” inProceedings of the IEEE/CVF Con- ference on Computer Vision and Pattern Recognition, 2018, pp. 9000– 9008
work page 2018
-
[70]
Raft: Recurrent all-pairs field transforms for optical flow,
Z. Teed and J. Deng, “Raft: Recurrent all-pairs field transforms for optical flow,” inProceedings of the European Conference on Computer Vision, 2020, pp. 402–419
work page 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.