See What Matters: Differentiable Grid Sample Pruning for Generalizable Vision-Language-Action Model
Pith reviewed 2026-05-20 22:13 UTC · model grok-4.3
The pith
A differentiable grid sampler prunes visual tokens in vision-language-action models to under 10 percent while keeping full success rates on manipulation tasks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that rethinking visual compression as geometry-aware continuous resampling rather than discrete removal lets vision-language-action models keep every task-critical spatial detail. The proposed Differentiable Grid Sampler predicts a minimal set of salient coordinates from the current task and language input then extracts the corresponding features by differentiable interpolation. This produces a compressed visual representation with fewer than 10 percent of the original tokens, delivers a 76 percent reduction in FLOPs, and shows no drop in success rate on the LIBERO benchmark or on a real robotic platform.
What carries the argument
The Differentiable Grid Sampler, a plug-and-play module that adaptively predicts a small number of salient image coordinates and extracts features from them via differentiable interpolation instead of discarding whole tokens.
If this is right
- Vision-language-action models can run with under 10 percent of their original visual tokens and still complete the same manipulation tasks.
- A 76 percent reduction in FLOPs becomes achievable without any measured loss in success rate on existing benchmarks.
- Continuous coordinate-based resampling avoids the irreversible loss of contact-point geometry that discrete pruning produces.
- The module slots into existing vision-language-action architectures and works on both simulated and physical robot setups.
Where Pith is reading between the lines
- The same coordinate-prediction idea could be tried in other vision-language models where precise spatial layout matters for actions.
- Lower token counts may translate directly into longer battery life for mobile robots operating in homes or warehouses.
- Testing the sampler on cameras with different fields of view or under changing illumination would reveal how robust the learned coordinate selection really is.
Load-bearing premise
The method assumes that predicting a minimal set of coordinates and interpolating features from them will always capture every geometric detail the robot needs even under occlusion, lighting changes, or new objects.
What would settle it
Measure success rate on a manipulation task with a novel object under strong occlusion; if the pruned model drops below the unpruned baseline the central claim is false.
Figures















read the original abstract
Vision-Language-Action (VLA) models have shown remarkable promise in robotics manipulation, yet their high computational cost hinders real-time deployment. Existing token pruning methods suffer from a fundamental trade-off: aggressive compression using pruning inevitably discards critical geometric details like contact points, leading to severe performance degradation. This forces a compromise, limiting the achievable compression rate and thus the potential speedup. We argue that breaking this trade-off requires rethinking compression as a geometry-aware, continuous token resampling in the vision encoder. To this end, we propose the Differentiable Grid Sampler (GridS), a plug-and-play module that performs task-aware, continuous resampling of visual tokens in VLA. By adaptively predicting a minimal set of salient coordinates and extracting features via differentiable interpolation, GridS preserves essential spatial information while achieving drastic compression (with fewer than 10% original visual tokens). Experiments on both LIBERO benchmark and a real robotic platform demonstrate that validating the lowest feasible visual token count reported to date, GridS achieves a 76% reduction in FLOPs with no degradation in the success rate. The code is available at https://github.com/Fediory/Grid-Sampler.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces the Differentiable Grid Sampler (GridS) as a plug-and-play module for Vision-Language-Action (VLA) models. GridS adaptively predicts a minimal set of salient coordinates and extracts features via differentiable interpolation to perform task-aware continuous resampling of visual tokens in the vision encoder. This is positioned as breaking the compression-performance trade-off of existing discrete pruning methods by preserving essential spatial information such as contact points. The approach reduces visual tokens to fewer than 10% of the original count. Experiments on the LIBERO benchmark and a real robotic platform report a 76% reduction in FLOPs with no degradation in success rate, claiming validation of the lowest feasible visual token count to date. Code is released at https://github.com/Fediory/Grid-Sampler.
Significance. If the empirical results prove robust under detailed scrutiny, the work could meaningfully advance real-time deployment of VLA models in robotics by offering a geometry-aware compression technique that maintains task performance at high compression ratios. The code release supports reproducibility, which is a clear strength. The core idea of reframing pruning as continuous resampling addresses a practical limitation in current VLA systems.
major comments (2)
- [Abstract] Abstract: the claim of a 76% FLOPs reduction with no degradation in success rate is presented without specifying the exact baselines, number of runs or statistical tests, precise token counts per experiment, or ablation of the interpolation step. These omissions leave the central empirical assertion without visible derivation or controls, undermining assessment of whether the result holds.
- [Method] Method section (GridS description): the assumption that adaptive coordinate prediction plus differentiable interpolation reliably retains all task-critical geometric details (e.g., contact points) under occlusion, lighting variation, or novel objects is load-bearing for the generality claim yet lacks targeted evidence or failure-case analysis. Bilinear interpolation on predicted points can smooth localized high-frequency cues that discrete pruning would also lose, potentially reintroducing the very information loss the method seeks to avoid.
minor comments (2)
- [Abstract] The abstract states that GridS 'validates the lowest feasible visual token count reported to date'; this comparative claim requires an explicit table or figure in the main text showing prior methods and their token counts.
- [Method] Notation for the number of salient coordinates and the interpolation kernel should be defined once in the method section and used consistently in equations and figures.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. The comments highlight important areas for improving the clarity and rigor of our empirical claims and methodological assumptions. We address each major comment point by point below, indicating where revisions have been made to the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim of a 76% FLOPs reduction with no degradation in success rate is presented without specifying the exact baselines, number of runs or statistical tests, precise token counts per experiment, or ablation of the interpolation step. These omissions leave the central empirical assertion without visible derivation or controls, undermining assessment of whether the result holds.
Authors: We agree that the abstract would benefit from greater specificity to allow readers to better evaluate the central claims. In the revised manuscript, we have updated the abstract to explicitly state the baselines (standard VLA models without pruning and representative discrete token pruning approaches), the evaluation protocol (results averaged over 5 random seeds with reported standard deviations), the precise token retention (fewer than 10% of original visual tokens, specifically 8% on average across LIBERO tasks), and a reference to the ablation study on the differentiable interpolation component (detailed in Section 4.3). These additions directly address the derivation and controls for the reported 76% FLOPs reduction and maintained success rate. revision: yes
-
Referee: [Method] Method section (GridS description): the assumption that adaptive coordinate prediction plus differentiable interpolation reliably retains all task-critical geometric details (e.g., contact points) under occlusion, lighting variation, or novel objects is load-bearing for the generality claim yet lacks targeted evidence or failure-case analysis. Bilinear interpolation on predicted points can smooth localized high-frequency cues that discrete pruning would also lose, potentially reintroducing the very information loss the method seeks to avoid.
Authors: We acknowledge that stronger targeted evidence for robustness under challenging conditions would better support the generality claims. While the LIBERO benchmark and real-robot experiments encompass variations in lighting, object novelty, and some occlusion scenarios where overall task success is preserved, we agree that dedicated failure-case analysis is valuable. In the revision, we have added a new paragraph in the experiments section with qualitative examples and quantitative breakdowns of performance under explicit occlusion and lighting changes, showing that the adaptive coordinate prediction continues to prioritize contact-relevant regions. On the bilinear interpolation concern, we note that our ablations demonstrate higher retention of task-critical spatial cues relative to discrete pruning at the same compression level; however, we have expanded the method discussion to explicitly address potential smoothing effects and how task-aware coordinate selection helps mitigate them, while noting this as a direction for future refinement. revision: partial
Circularity Check
No significant circularity; method is an independent empirical module
full rationale
The paper introduces GridS as a plug-and-play differentiable resampling module that predicts salient coordinates and applies interpolation to compress visual tokens in VLA models. Performance claims (76% FLOP reduction, preserved success rate) rest on experimental validation across LIBERO and real-robot platforms rather than any derivation that reduces by construction to fitted parameters, self-citations, or renamed inputs. No load-bearing step equates the output to the input via definition or prior self-work; the coordinate predictor and interpolation are presented as novel design choices whose effectiveness is tested externally.
Axiom & Free-Parameter Ledger
free parameters (1)
- number of salient coordinates
axioms (1)
- domain assumption Differentiable interpolation from predicted coordinates preserves task-critical geometric and spatial information.
invented entities (1)
-
Differentiable Grid Sampler (GridS)
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
By adaptively predicting a minimal set of salient coordinates and extracting features via differentiable interpolation... ω1 = (1−Δx)(1−Δy), ... Fsampled(x,y) = Σ ωk · Pk
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanabsolute_floor_iff_bare_distinguishability unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
GridS resolves this efficiency-performance trade-off through joint optimization
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
LIBERO-Plus: In-depth Robustness Analysis of Vision-Language-Action Models
URL https://proceedings.mlr.press/ v202/driess23a.html. Fei, S., Wang, S., Shi, J., Dai, Z., Cai, J., Qian, P., Ji, L., He, X., Zhang, S., Fei, Z., et al. Libero-plus: In-depth robust- ness analysis of vision-language-action models.arXiv preprint arXiv:2510.13626, 2025. Houlsby, N., Giurgiu, A., Jastrzebski, S., Morrone, B., De Laroussilhe, Q., Gesmundo, ...
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[2]
PMLR, 2019. Hu, E. J., yelong shen, Wallis, P., Allen-Zhu, Z., Li, Y ., Wang, S., Wang, L., and Chen, W. LoRA: Low-rank adap- tation of large language models. InInternational Confer- ence on Learning Representations, 2022. URL https: //openreview.net/forum?id=nZeVKeeFYf9. Hui, C., Huang, X., Xu, S., Wang, Y ., You, S., Wang, F., Huang, T., and Xu, C. Seei...
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[3]
cc/paper_files/paper/2025/file/ 3a2ef31a1e45908901adc0ca853a8faf-Paper-Conference
URL https://proceedings.neurips. cc/paper_files/paper/2025/file/ 3a2ef31a1e45908901adc0ca853a8faf-Paper-Conference. pdf. Yuan, W., Duan, J., Blukis, V ., Pumacay, W., Krishna, R., Murali, A., Mousavian, A., and Fox, D. Robopoint: A vision-language model for spatial affordance predic- tion in robotics. In Agrawal, P., Kroemer, O., and Bur- gard, W. (eds.),...
work page 2025
-
[4]
Zhai, X., Mustafa, B., Kolesnikov, A., and Beyer, L
URL https://proceedings.mlr.press/ v270/yuan25c.html. Zhai, X., Mustafa, B., Kolesnikov, A., and Beyer, L. Sig- moid loss for language image pre-training. InProceed- ings of the IEEE/CVF international conference on com- puter vision, pp. 11975–11986, 2023. Zhang, Y ., Fan, C.-K., Ma, J., Zheng, W., Huang, T., Cheng, K., Gudovskiy, D. A., Okuno, T., Nakata...
work page 2023
-
[5]
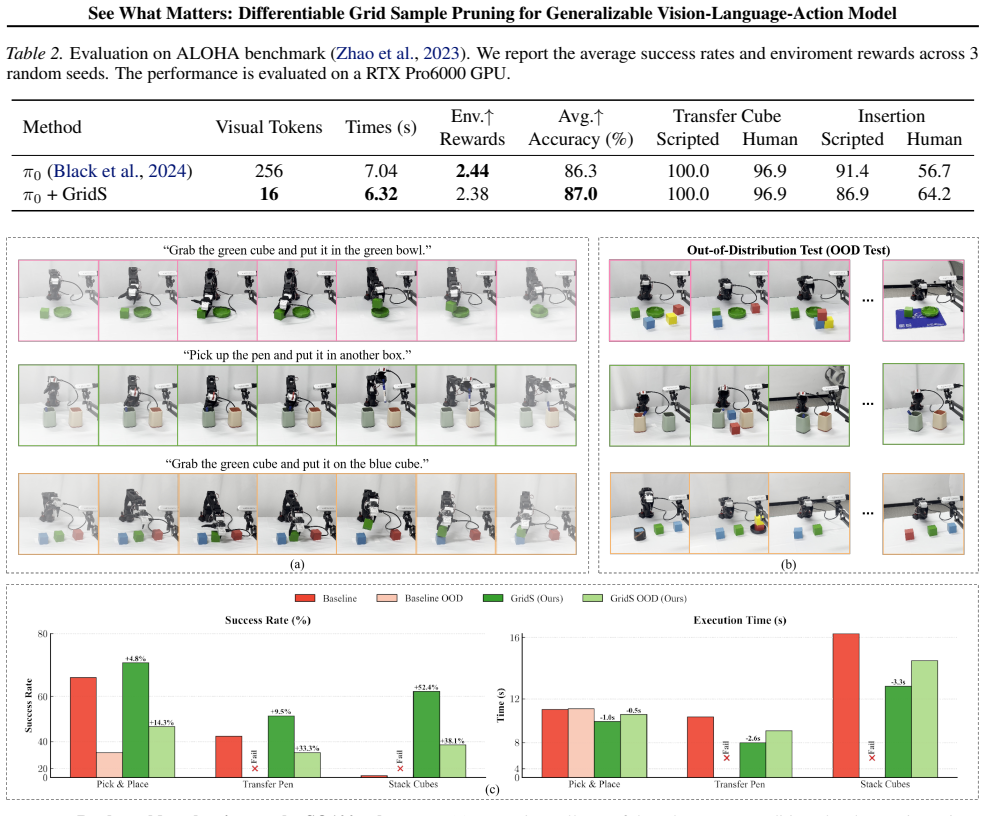
URL https://proceedings.mlr.press/ v267/zhang25s.html. Zhao, T. Z., Kumar, V ., Levine, S., and Finn, C. Learning fine-grained bimanual manipulation with low-cost hard- ware. InICML Workshop on New Frontiers in Learning, Control, and Dynamical Systems, 2023. URL https: //openreview.net/forum?id=e8Eu1lqLaf. 11 See What Matters: Differentiable Grid Sample P...
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[6]
Remarkable Parameter and Data Efficiency under In-Domain Augmented Training.When co-trained on the augmented LIBERO-PLUS dataset, the dense baseline (π0.5) recovers from its previously catastrophic OOD failures (e.g., Camera Viewpoints in Spatial jumps from 67.0% to 94.9%). Given this highly saturated in-domain setting, it is remarkable that GridS success...
-
[7]
The Persistent Advantage of Information Bottleneck in Visual Perturbations.The most profound observation from this in-domain evaluation (Panel A) is that despite the baseline being explicitly trained on all perturbation types, GridSstill 17 See What Matters: Differentiable Grid Sample Pruning for Generalizable Vision-Language-Action Model Table 8.In-Domai...
-
[8]
Analyzing the Resolution Trade-off (Where GridS Degrades).The slight average performance drop (e.g., -1.2% in Spatial) can be directly attributed to dimensions that necessitate extremely high-resolution, fine-grained visual details: • Robot Initial States:GridS exhibits performance drops (-2.7% to -9.7%) when the initial joint configuration is heavily ran...
-
[9]
Difficulty Dynamics: The “Learning is Forgetting” Signature.A granular analysis of the task difficulty levels (Panel B) reveals a profound dynamic. In highly predictable, easy scenarios (Level-1 and Level-2), the dense baseline slightly outperforms GridS because its 256 tokens enable perfect memorization of specific visual layouts. However, as the perturb...
-
[10]
Where GridS Excels: Visual and Spatial Robustness.GridS demonstrates overwhelming superiority in perturbation dimensions that heavily distort visual geometry and rendering (Panel A). • Camera Viewpoints:The dense baseline completely collapses under camera shifts (dropping to 67.0% in Spatial and 45.8% in LIBERO-10) due to severecamera overfitting—it relie...
-
[11]
Where GridS Struggles: Fine-Grained Kinematics and Semantics.While highly resilient to visual variance, extreme compression inevitably introduces specific trade-offs: • Robot Initial States:GridS exhibits performance drops (-8.8% to -14.0%) when the robot’s initial joint angles are heavily perturbed. In difficult instances where the arm starts far from th...
-
[12]
Superiority over Discrete Pruning Paradigms and Final Advantage.To contextualize these results, it is imperative to note that existing discrete token reduction methods, such as FastV and SparseVLM,suffer catastrophic performance drops exceeding 20% on the LIBERO-PLUS dataset. By discretely dropping patches, they fracture the continuous 2D spatial structur...
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.