Learning Context-conditioned Gaussian Overbounds for Convolution-Based Uncertainty Propagation
Pith reviewed 2026-05-20 21:02 UTC · model grok-4.3
The pith
Neural networks can be trained to output context-aware Gaussian overbounds that guarantee conservatism on a quantile grid and under regularity assumptions on continuous intervals.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors present a unified learning framework that trains neural networks to produce context-aware Gaussian overbounds with provable conservatism on a finite quantile grid and, under three explicit regularity assumptions, continuous-tail conservatism on a certified interval. The overbounding loss enforces conservativeness at selected quantiles while penalizing distributional distance with a Wasserstein-style term. The learned bounds support conservative linear-combination and convolution analysis on the enforced grid, and on the certified interval when assumptions hold, while being less redundant than traditional methods.
What carries the argument
Context-conditioned Gaussian overbound consisting of a learned mean and scale that dominates the true distribution at selected quantiles via a specialized loss combining quantile conservatism with a Wasserstein-style penalty.
If this is right
- The bounds compose safely under linear combinations and convolutions on the enforced quantile grid.
- Continuous-tail conservatism holds on a certified interval whenever the three regularity assumptions are met.
- The resulting overbounds are tighter and less redundant than classical global Gaussian overbounds across tested error sources.
- The framework applies directly to feature-conditioned errors arising in multipath, ionospheric, and tropospheric residuals.
Where Pith is reading between the lines
- The same training structure could be tested on other parametric families such as Student-t overbounds if analogous regularity conditions can be stated.
- Integration with existing conformal or quantile-regression pipelines might yield hybrid bounds that inherit both learned adaptivity and distribution-free coverage.
- The discrete-to-continuous extension analysis could be reused as a template for proving conservatism under other propagation operators beyond linear convolution.
Load-bearing premise
The three regularity assumptions that allow the finite-grid conservatism to extend to continuous tails on the certified interval.
What would settle it
An explicit counterexample distribution satisfying the three regularity assumptions for which the learned Gaussian fails to dominate the true law at some point outside the selected quantile grid.
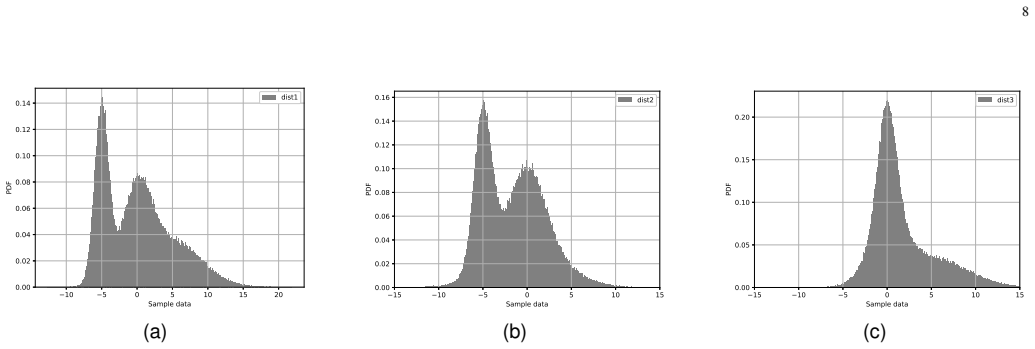
Figures







read the original abstract
Uncertainty quantification is essential in safety-critical settings--from autonomous driving to aviation, finance, and health--where decisions must rely on conservative bounds rather than point estimates. Predictor-level intervals (e.g., from quantile regression, conformal prediction, variance networks, or Bayesian models) generally do not compose: adding two per-variable intervals need not yield a valid interval for their sum or preserve coverage. In aviation, Gaussian overbounding replaces complex error distributions with a conservative Gaussian whose tails dominate the truth, so conservatism propagates through linear operations. Yet classical overbounds are global, often overly conservative, and hard to adapt to feature-conditioned errors. We propose a unified learning framework that trains neural networks to produce context-aware Gaussian overbounds--mean and scale--with provable conservatism on a finite quantile grid and, under three explicit regularity assumptions, continuous-tail conservatism on a certified interval. Our overbounding loss enforces conservativeness at selected quantiles while penalizing distributional distance with a Wasserstein-style term. The learned bounds support conservative linear-combination and convolution analysis on the enforced grid, and on the certified interval when assumptions hold, while being less redundant than traditional methods. We provide a scoped analysis of discrete-to-continuous conservatism and compact-domain objective regularity, and validate on synthetic data and real-world datasets, including multipath, ionospheric, and tropospheric residual errors. Across these settings, the method yields tighter bounds while maintaining conservatism on the enforced grid and in experiments. The framework is modality-agnostic and applicable to learning systems that require conservative, feature-conditioned uncertainty estimates in dynamic environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a neural network framework to learn context-conditioned Gaussian overbounds (mean and scale parameters) for uncertainty quantification. The central claim is that an overbounding loss enforces provable conservatism at selected quantiles on a finite grid, with a Wasserstein-style penalty for distributional distance; under three explicit regularity assumptions, this extends to continuous-tail conservatism on a certified interval. The bounds are intended to support conservative linear combinations and convolutions, and the method is evaluated on synthetic data plus real-world residual error datasets (multipath, ionospheric, tropospheric), reporting tighter bounds than classical global overbounds while preserving grid conservatism.
Significance. If the discrete-grid conservatism is rigorously established and the regularity assumptions can be verified or shown to hold broadly, the work would meaningfully advance context-aware conservative uncertainty propagation for safety-critical applications. It combines learning-based adaptability with the composability properties of Gaussian overbounds, addressing a practical gap in fields like aviation and autonomous systems. The scoped analysis of discrete-to-continuous extension and the modality-agnostic design are strengths; however, the conditional nature of the continuous guarantee without supporting diagnostics reduces the immediate impact.
major comments (2)
- [Abstract / discrete-to-continuous analysis section] Abstract and the section presenting the scoped analysis of discrete-to-continuous conservatism: the extension from finite-quantile-grid conservatism to continuous-tail conservatism on a certified interval is stated to require three explicit regularity assumptions, yet the manuscript supplies no post-training diagnostic, no empirical check on the learned distributions, and no discussion of data regimes or frequency with which these assumptions hold. This makes the continuous guarantee conditional and load-bearing for the headline claim.
- [Methods / loss formulation] The overbounding loss formulation (described in the methods): while the loss directly enforces conservatism at selected quantiles, the central conservatism claim is tied to the training objective itself rather than an independent external benchmark or post-hoc verification procedure; this creates a circularity burden that should be addressed by adding an independent coverage diagnostic on held-out data.
minor comments (2)
- [Methods] Clarify the precise weighting between the quantile-enforcement terms and the Wasserstein-style penalty in the loss; provide the explicit mathematical form and any hyperparameter sensitivity analysis.
- [Experiments] In the experimental results, report quantitative metrics (e.g., bound tightness ratios or coverage gaps) alongside qualitative statements that the bounds are 'tighter while maintaining conservatism.'
Simulated Author's Rebuttal
We thank the referee for their insightful comments and constructive feedback on our manuscript. We address each major comment below, acknowledging where additional support would strengthen the work, and outline the revisions we plan to incorporate.
read point-by-point responses
-
Referee: Abstract and the section presenting the scoped analysis of discrete-to-continuous conservatism: the extension from finite-quantile-grid conservatism to continuous-tail conservatism on a certified interval is stated to require three explicit regularity assumptions, yet the manuscript supplies no post-training diagnostic, no empirical check on the learned distributions, and no discussion of data regimes or frequency with which these assumptions hold. This makes the continuous guarantee conditional and load-bearing for the headline claim.
Authors: We agree that the continuous-tail conservatism is conditional on the three regularity assumptions and that the manuscript would benefit from empirical support beyond the existing scoped theoretical analysis. In the revision, we will add post-training diagnostics to verify the assumptions on the learned distributions for the synthetic and real-world residual error datasets. We will also include discussion of relevant data regimes (such as smoothness properties in multipath, ionospheric, and tropospheric errors) and report any observed adherence or violations in our experiments. revision: yes
-
Referee: The overbounding loss formulation (described in the methods): while the loss directly enforces conservatism at selected quantiles, the central conservatism claim is tied to the training objective itself rather than an independent external benchmark or post-hoc verification procedure; this creates a circularity burden that should be addressed by adding an independent coverage diagnostic on held-out data.
Authors: We acknowledge the concern about potential circularity when conservatism is enforced via the training objective. Although the loss is constructed to guarantee quantile-level conservatism by design, we agree that independent verification is valuable. In the revised manuscript, we will add an independent coverage diagnostic on held-out data, reporting empirical quantile coverage rates and comparing them against the theoretical guarantees to provide external validation separate from the training loss. revision: yes
Circularity Check
Conservatism on quantile grid is enforced by construction via overbounding loss; continuous extension conditional on unverified assumptions
specific steps
-
fitted input called prediction
[Abstract]
"Our overbounding loss enforces conservativeness at selected quantiles while penalizing distributional distance with a Wasserstein-style term. The learned bounds support conservative linear-combination and convolution analysis on the enforced grid, and on the certified interval when assumptions hold"
The claimed provable conservatism on the finite quantile grid is not derived from first principles or external benchmarks but is instead directly imposed by the overbounding loss term in the training objective. The 'prediction' of conservative bounds therefore reduces to the enforcement mechanism built into the loss by construction.
full rationale
The paper's central guarantee of provable conservatism on the finite quantile grid is achieved directly through the design of the training loss, which explicitly enforces conservativeness at selected quantiles. This makes the discrete-case claim tautological with the objective rather than independently derived. The extension to continuous tails further depends on three regularity assumptions whose satisfaction is not diagnosed post-training or empirically validated in the provided experiments, leaving the headline result partially circular and conditional in practice. No self-citation chains or imported uniqueness theorems appear load-bearing here.
Axiom & Free-Parameter Ledger
free parameters (1)
- neural network weights and biases
axioms (1)
- domain assumption Three explicit regularity assumptions enabling extension from discrete quantile conservatism to continuous-tail conservatism
Reference graph
Works this paper leans on
-
[1]
A survey on uncer tainty quantification methods for deep learning,
W. He, Z. Jiang, T. Xiao, Z. Xu, and Y . Li, “A survey on uncer tainty quantification methods for deep learning,” ACM Computing Surveys , 2025
work page 2025
-
[2]
J. Dong, Z. Jiang, D. Pan, Z. Chen, Q. Guan, H. Zhang, G. Gui , and W. Gui, “A survey on confidence calibration of deep learning- based classification models under class imbalance data,” IEEE Transactions on Neural Networks and Learning Systems , 2025
work page 2025
-
[3]
Dropout as a bayesian approxim ation: Representing model uncertainty in deep learning,
Y . Gal and Z. Ghahramani, “Dropout as a bayesian approxim ation: Representing model uncertainty in deep learning,” in international conference on machine learning . PMLR, 2016, pp. 1050–1059. 19
work page 2016
-
[4]
J. Lu, J. Ding, C. Liu, and T. Chai, “Hierarchical-bayesi an-based sparse stochastic configuration networks for construction of pred iction inter- vals,” IEEE Transactions on Neural Networks and Learning Systems , vol. 33, no. 8, pp. 3560–3571, 2021
work page 2021
-
[5]
What uncertainties do we need in ba yesian deep learning for computer vision?
A. Kendall and Y . Gal, “What uncertainties do we need in ba yesian deep learning for computer vision?” Advances in neural information processing systems, vol. 30, 2017
work page 2017
-
[6]
Simp le and scalable predictive uncertainty estimation using deep ensembles,
B. Lakshminarayanan, A. Pritzel, and C. Blundell, “Simp le and scalable predictive uncertainty estimation using deep ensembles,” Advances in neural information processing systems , vol. 30, 2017
work page 2017
-
[7]
R. Koenker and G. B. Jr, “Regression quantiles,” Econometrica: journal of the Econometric Society , pp. 33–50, 1978
work page 1978
-
[8]
A Gentle Introduction to Conformal Prediction and Distribution-Free Uncertainty Quantification
A. N. Angelopoulos and S. Bates, “A gentle introduction t o confor- mal prediction and distribution-free uncertainty quantifi cation,” arXiv preprint arXiv:2107.07511, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[9]
Strictly proper scoring r ules, prediction, and estimation,
T. Gneiting and A. E. Raftery, “Strictly proper scoring r ules, prediction, and estimation,” Journal of the American Statistical Association , vol. 102, no. 477, pp. 359–378, 2007
work page 2007
-
[10]
Conformal predic tion: A data perspective,
X. Zhou, B. Chen, Y . Gui, and L. Cheng, “Conformal predic tion: A data perspective,” ACM Comput. Surv. , vol. 58, no. 2, Sep. 2025. [Online]. Available: https://doi.org/10.1145/3736575
-
[11]
Distribution-free predictio n bands for non- parametric regression,
J. Lei and L. Wasserman, “Distribution-free predictio n bands for non- parametric regression,” Journal of the Royal Statistical Society: Series B, vol. 76, no. 1, pp. 71–96, 2014
work page 2014
-
[12]
The limits of distribution-free conditional predictive inference,
R. F. Barber, E. J. Cand` es, A. Ramdas, and R. J. Tibshira ni, “The limits of distribution-free conditional predictive inference,” Information and Inference: A Journal of the IMA , vol. 10, no. 2, pp. 455–482, 2021
work page 2021
-
[13]
Conformalized quantile regression,
Y . Romano, E. Patterson, and E. Candes, “Conformalized quantile regression,” Advances in neural information processing systems , vol. 32, 2019
work page 2019
-
[14]
Defining pseudorange integrity-overbou nding,
B. DeCleene, “Defining pseudorange integrity-overbou nding,” in Pro- ceedings of the 13th international technical meeting of the satellite division of the institute of navigation (ION GPS 2000) , 2000, pp. 1916– 1924
work page 2000
-
[15]
Overbounding revisited: discre te error- distribution modeling for safety-critical gps navigation ,
J. Rife and B. Pervan, “Overbounding revisited: discre te error- distribution modeling for safety-critical gps navigation ,” IEEE Trans- actions on Aerospace and Electronic Systems , vol. 48, no. 2, pp. 1537– 1551, 2012
work page 2012
-
[16]
An overbound concept for pse udorange error from the laas ground facility,
C. A. Shively and R. Braff, “An overbound concept for pse udorange error from the laas ground facility,” in Proceedings of the IAIN W orld Congress and the 56th Annual Meeting of The Institute of Navi gation (2000), 2000, pp. 661–671
work page 2000
-
[17]
Paired overb ounding and application to gps augmentation,
J. Rife, S. Pullen, B. Pervan, and P . Enge, “Paired overb ounding and application to gps augmentation,” in PLANS 2004. Position Location and Navigation Symposium (IEEE Cat. No. 04CH37556) . IEEE, 2004, pp. 439–446
work page 2004
-
[18]
Gaussian bounds of sa mple dis- tributions for integrity analysis,
J. Blanch, T. Walter, and P . Enge, “Gaussian bounds of sa mple dis- tributions for integrity analysis,” IEEE Transactions on Aerospace and Electronic Systems, vol. 55, no. 4, pp. 1806–1815, 2018
work page 2018
-
[19]
Machine learning based overbound m odeling of multipath error for safety critical urban environment,
H. No and C. Milner, “Machine learning based overbound m odeling of multipath error for safety critical urban environment,” in Proceedings of the 34th International Technical Meeting of the Satellit e Division of The Institute of Navigation (ION GNSS+ 2021) , 2021, pp. 180–194
work page 2021
-
[20]
Overbounding multipath error in ur ban canyon with lstm using multi-sensor features,
R. Liu and Y . Jiang, “Overbounding multipath error in ur ban canyon with lstm using multi-sensor features,” IEEE Transactions on Intelligent Transportation Systems, 2024
work page 2024
-
[21]
Robust gnss multipath err or modeling based on deep quantile regression with gaussian overboundi ng,
F. R¨ oßl and O. G. Crespillo, “Robust gnss multipath err or modeling based on deep quantile regression with gaussian overboundi ng,” in Proceedings of the 37th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2024) , 2024, pp. 1402–1415
work page 2024
-
[22]
Uncertainty quantification and deep ensembles,
R. Rahaman et al. , “Uncertainty quantification and deep ensembles,” Advances in neural information processing systems , vol. 34, pp. 20 063– 20 075, 2021
work page 2021
-
[23]
Adaptive sparse gaussian process,
V . Gomez-V erdejo, E. Parrado-Hernandez, and M. Martin ez-Ramon, “Adaptive sparse gaussian process,” IEEE Transactions on Neural Net- works and Learning Systems , 2023
work page 2023
-
[24]
Reliable trai ning and estima- tion of variance networks,
N. Skafte, M. Jørgensen, and S. Hauberg, “Reliable trai ning and estima- tion of variance networks,” Advances in Neural Information Processing Systems, vol. 32, 2019
work page 2019
-
[25]
Improving uncertainty quan tification of variance networks by tree-structured learning,
W. Ma, X. Y an, and K. Zhang, “Improving uncertainty quan tification of variance networks by tree-structured learning,” IEEE Transactions on Neural Networks and Learning Systems , 2023
work page 2023
-
[26]
Calibrated reliable regressi on using max- imum mean discrepancy,
P . Cui, W. Hu, and J. Zhu, “Calibrated reliable regressi on using max- imum mean discrepancy,” Advances in Neural Information Processing Systems, vol. 33, pp. 17 164–17 175, 2020
work page 2020
-
[27]
Single-model uncerta inties for deep learning,
N. Tagasovska and D. Lopez-Paz, “Single-model uncerta inties for deep learning,” Advances in neural information processing systems , vol. 32, 2019
work page 2019
-
[28]
Bey ond pinball loss: Quantile methods for calibrated uncertainty quantifi cation,
Y . Chung, W. Neiswanger, I. Char, and J. Schneider, “Bey ond pinball loss: Quantile methods for calibrated uncertainty quantifi cation,” Ad- vances in Neural Information Processing Systems , vol. 34, pp. 10 971– 10 984, 2021
work page 2021
-
[29]
A tutorial on conformal predicti on
G. Shafer and V . V ovk, “A tutorial on conformal predicti on.” Journal of Machine Learning Research , vol. 9, no. 3, 2008
work page 2008
-
[30]
Ensemble co nformalized quantile regression for probabilistic time series forecas ting,
V . Jensen, F. M. Bianchi, and S. N. Anfinsen, “Ensemble co nformalized quantile regression for probabilistic time series forecas ting,” IEEE Transactions on Neural Networks and Learning Systems , vol. 35, no. 7, pp. 9014–9025, 2022
work page 2022
-
[31]
Conformal los s- controlling prediction,
D. Wang, P . Wang, Z. Ji, X. Y ang, and H. Li, “Conformal los s- controlling prediction,” IEEE Transactions on Neural Networks and Learning Systems , 2024
work page 2024
-
[32]
Satelli te pose set estimation by uncertainty-guided conformal keypoint dete ction,
J. Wang, Z. Li, C. Sun, Y . Guo, Z. Wang, and Q. Y u, “Satelli te pose set estimation by uncertainty-guided conformal keypoint dete ction,” IEEE Transactions on Neural Networks and Learning Systems , 2025
work page 2025
-
[33]
Symmetric overboundi ng of correlated errors,
J. Rife and D. GEBRE-EGZIABHER, “Symmetric overboundi ng of correlated errors,” Navigation, vol. 54, no. 2, pp. 109–124, 2007
work page 2007
-
[34]
Impro ving navigation system availability using gaussian-pareto overbounding,
J. D. Larson, D. Gebre-Egziabher, and J. H. Rife, “Impro ving navigation system availability using gaussian-pareto overbounding, ” in Proceedings of the 32nd International Technical Meeting of the Satellit e Division of The Institute of Navigation (ION GNSS+ 2019) , 2019, pp. 3153–3161
work page 2019
-
[35]
IGS final troposphere est imates,
International GNSS Service, “IGS final troposphere est imates,” Available at https://cddis.nasa.gov/Data and Derived Products/GNSS/ troposphere products.html, NASA Crustal Dynamics Data Information System (CDDIS), Greenbelt, MD, USA, 2022
work page 2022
-
[36]
Enhancing tropospheric z enith wet delay interpolation with gaussian process regression,
X. Hou, Y . Jiang, and X. Zhan, “Enhancing tropospheric z enith wet delay interpolation with gaussian process regression,” IEEE Transactions on Geoscience and Remote Sensing , vol. 62, pp. 1–14, 2024
work page 2024
-
[37]
L.-T. Hsu, F. Huang, H.-F. Ng, G. Zhang, Y . Zhong, X. Bai, and W. Wen, “Hong kong urbannav: An open-source multisensory da taset for benchmarking urban navigation algorithms,” NA VIGATION: Journal of the Institute of Navigation , vol. 70, no. 4, 2023
work page 2023
-
[38]
Ionospheric VTEC map forecasting b ased on graph neural network with transformers,
R. Liu and Y . Jiang, “Ionospheric VTEC map forecasting b ased on graph neural network with transformers,” Proceedings of the 36th International Technical Meeting of the Satellite Division of The Institut e of Navigation (ION GNSS+ 2023) , pp. 136–148, 2023
work page 2023
-
[39]
Ionospheric vtec maps forecasting based on graph n eural network with transformers,
——, “Ionospheric vtec maps forecasting based on graph n eural network with transformers,” IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing , 2024
work page 2024
-
[40]
Robust detection of ionospheric irregularities,
T. Walter, A. Hansen, J. Blanch, P . Enge, T. Mannucci, X. Pi, L. Sparks, B. Iijima, B. El-Arini, R. Lejeune et al., “Robust detection of ionospheric irregularities,” Navigation, vol. 48, no. 2, pp. 89–100, 2001
work page 2001
-
[41]
L. Sparks, J. Blanch, and N. Pandya, “Estimating ionosp heric delay using kriging: 2. impact on satellite-based augmentation s ystem availability,” Radio Science , vol. 46, no. 6, 2011. [Online]. Available: https://agupubs.onlinelibrary.wiley.com/doi/abs/10.1029/2011RS004781
-
[42]
H. Ren, Y . Jiang, and T. Liu, “An anisotropic kriging for ionospheric delay interpolation with a wide area reference network (202 4),” IEEE Transactions on Geoscience and Remote Sensing , 2024. Ruirui Liu received the B.Eng. degree in Electronic Information Engin eer- ing from the Department of Electronic Information Engineer ing, Huazhong University of ...
work page 2024
-
[43]
degree at The Hong Kong Polytechnic University
He is currently pursuing a Ph.D. degree at The Hong Kong Polytechnic University. His research interests include ionospheric mo deling and satellite- based augmentation systems (SBAS) integrity monitoring
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.