From Gridworlds to Warehouses: Adapting Lightweight One-shot Multi-Agent Pathfinding for AGVs
Pith reviewed 2026-05-19 18:54 UTC · model grok-4.3
The pith
Adapting MAPF for warehouse AGVs with motion constraints shows PIBT scales better than PP or LNS2 for large teams.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
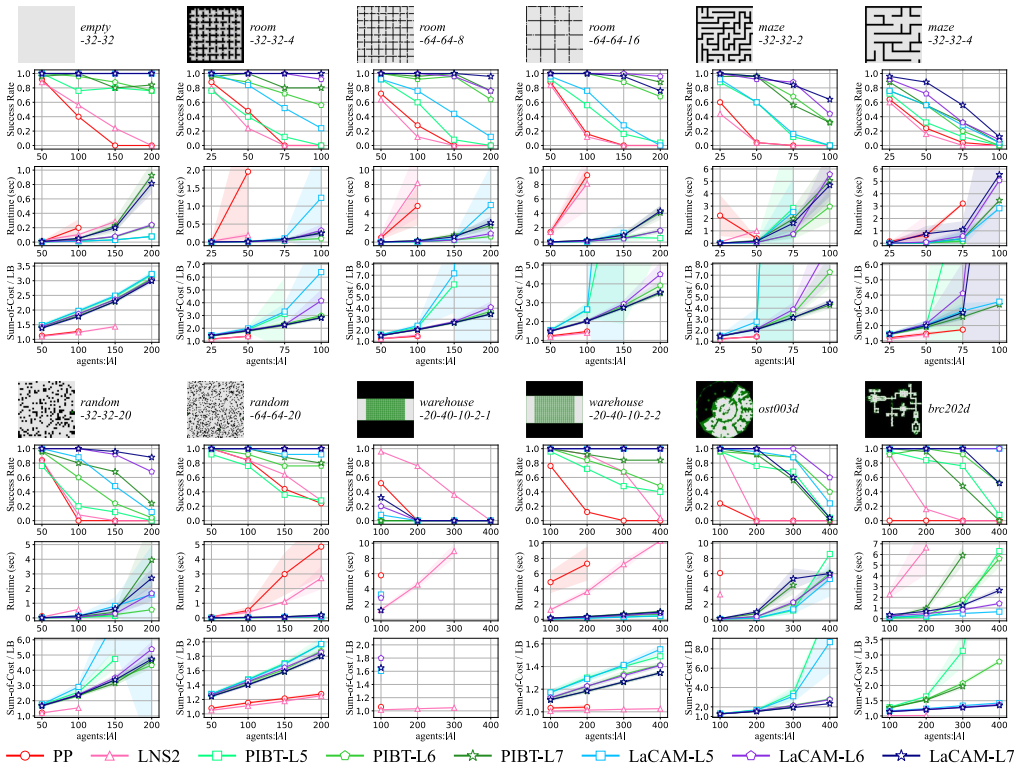
The paper claims that modeling MAWPF with the four constraints on straight motion, rotations, acceleration, and follower collisions allows representative MAPF algorithms to be adapted directly, and that experiments reveal PP and LNS2 struggle to solve instances with many agents while PIBT-based approaches achieve preferable scalability with increased solution cost.
What carries the argument
Multi-agent warehouse pathfinding (MAWPF), defined by the four constraints that restrict actions to straight motion and in-place rotation, model acceleration, and prohibit follower collisions for differential-drive AGVs.
If this is right
- PIBT-based planners can coordinate larger AGV teams in warehouses before computational limits are reached.
- Produced plans incur higher total cost from realistic rotation and speed changes yet remain executable.
- Discrete search methods continue to serve as a foundation instead of requiring full continuous optimization.
- Warehouse operators can extend existing MAPF codebases rather than build new planners from scratch.
Where Pith is reading between the lines
- The same four-constraint pattern could be adjusted for omnidirectional robots by replacing rotation costs with different turning rules.
- Pairing these discrete plans with low-level velocity controllers would let researchers measure how often planned paths match actual executed times.
- Relaxing the follower-collision rule in low-density zones might improve overall throughput without raising crash risk.
Load-bearing premise
The four constraints on straight motion, multi-step rotations, acceleration, and follower-collision prohibition are sufficient to close the main reality gaps for differential-drive AGVs while remaining tractable for discrete search.
What would settle it
Running the same benchmark instances on physical differential-drive AGVs and observing frequent rear-end collisions, infeasible turns, or travel times that deviate sharply from the discrete plans would falsify the modeling assumptions.
Figures






read the original abstract
Multi-agent pathfinding (MAPF) under one-shot planning is a core component of warehouse automation, yet classical formulations typically assume four-connected 2D grids with unit-time moves in four directions. To fill reality gaps while still being trackable with discrete combinatorial search, this work proposes a more practical counterpart tailored to differential-drive AGVs. We term this multi-agent warehouse pathfinding (MAWPF), featured with four constraints: (i) agent actions are restricted to straight motion and in-place rotation; (ii) rotations require multi-step costs; (iii) acceleration and deceleration are considered, and; (iv) follower collisions are prohibited to prevent rear-end crashes. To solve MAWPF efficiently, we adapt representative suboptimal MAPF algorithms-PP, LNS2, PIBT, and LaCAM-and conduct comprehensive benchmarking. Our experiments reveal that PP and LNS2 struggle to solve instances with many agents, while PIBT-based approaches achieve preferable scalability with increased solution cost. We believe that these constitute an important step toward adapting classical gridworld MAPF to operational warehouse setups.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Multi-Agent Warehouse Pathfinding (MAWPF) as a practical extension of one-shot MAPF for differential-drive AGVs. MAWPF adds four constraints—straight motion only, multi-step rotation costs, acceleration/deceleration, and prohibition of follower collisions—while remaining amenable to discrete search. The authors adapt four suboptimal MAPF solvers (PP, LNS2, PIBT, LaCAM) to MAWPF and benchmark them, claiming that PP and LNS2 fail to scale to instances with many agents whereas PIBT-based methods exhibit preferable scalability at the cost of higher solution quality.
Significance. If the experimental comparisons are conducted under uniform modeling of the MAWPF constraints, the work supplies useful empirical guidance for selecting MAPF algorithms in warehouse automation. It explicitly bridges classical gridworld assumptions to operational AGV realities by defining a small set of tractable constraints and demonstrating scalability trade-offs across representative solvers. The adaptation of multiple algorithms and the focus on one-shot planning constitute a concrete step toward deployable systems.
major comments (2)
- [Experimental results section] Experimental results section: the central claim that PP and LNS2 struggle with many agents while PIBT-based approaches scale better rests on comparative benchmarking, yet the manuscript supplies no quantitative tables, instance-generation procedure, map sizes, agent counts, or statistical tests. Without these details it is impossible to determine whether the reported scalability gap is robust or affected by post-hoc instance filtering.
- [Algorithm adaptation and modeling section] Algorithm adaptation and modeling section: the four MAWPF constraints (straight motion, multi-step rotations, acceleration/deceleration, follower-collision prohibition) must be encoded identically across PP, LNS2, PIBT, and LaCAM for the scalability comparison to be load-bearing. The manuscript does not provide state-representation details or pseudocode confirming uniform action sets and conflict checks; differential treatment of rotations or speed changes could produce the observed performance gap as an implementation artifact rather than an intrinsic algorithmic property.
minor comments (1)
- [Abstract] Abstract: the phrase 'comprehensive benchmarking' would be strengthened by a parenthetical mention of the range of agent numbers or warehouse sizes examined.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback and positive assessment of the work's significance in adapting MAPF to AGV settings. We address each major comment below.
read point-by-point responses
-
Referee: [Experimental results section] Experimental results section: the central claim that PP and LNS2 struggle with many agents while PIBT-based approaches scale better rests on comparative benchmarking, yet the manuscript supplies no quantitative tables, instance-generation procedure, map sizes, agent counts, or statistical tests. Without these details it is impossible to determine whether the reported scalability gap is robust or affected by post-hoc instance filtering.
Authors: We agree that additional quantitative details would improve transparency. The manuscript presents results via figures showing scalability trends, but we will revise to include a summary table of success rates, solution costs, and runtimes across agent counts. We will also explicitly describe the instance generation (random feasible start-goal pairs on warehouse maps), specify map sizes and agent ranges used, and report standard deviations to support the robustness of the observed differences between solvers. revision: yes
-
Referee: [Algorithm adaptation and modeling section] Algorithm adaptation and modeling section: the four MAWPF constraints (straight motion, multi-step rotations, acceleration/deceleration, follower-collision prohibition) must be encoded identically across PP, LNS2, PIBT, and LaCAM for the scalability comparison to be load-bearing. The manuscript does not provide state-representation details or pseudocode confirming uniform action sets and conflict checks; differential treatment of rotations or speed changes could produce the observed performance gap as an implementation artifact rather than an intrinsic algorithmic property.
Authors: We thank the referee for this observation. All four algorithms were adapted using a shared state representation that augments position with orientation and velocity to enforce the MAWPF constraints identically, including uniform handling of multi-step rotations, acceleration profiles, and follower-collision rules. To address the concern directly, we will add explicit state definitions and pseudocode for the common action generation and conflict-checking procedures in the revised version. revision: yes
Circularity Check
No circularity in empirical adaptation and benchmarking
full rationale
The paper defines MAWPF via four explicit constraints on AGV motion and adapts existing algorithms (PP, LNS2, PIBT, LaCAM) for direct experimental comparison on scalability and cost. All claims rest on reported benchmark outcomes rather than any derivation, fitted parameter, or self-citation chain that reduces a result to the paper's own inputs by construction. The work is self-contained as an empirical study with no load-bearing mathematical steps that loop back to definitions or prior author results.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Prioritized sipp for multi-agent path finding with kinematic constraints
[Ali and Yakovlev, 2021] Zain Alabedeen Ali and Kon- stantin Yakovlev. Prioritized sipp for multi-agent path finding with kinematic constraints. InInteractive Collab- orative Robotics (ICR 2021), Lecture Notes in Computer Science (LNAI),
work page 2021
-
[2]
The league of robot runners competition: Goals, designs, and implementation
[Chanet al., 2024 ] Shao-Hung Chan, Zhe Chen, Teng Guo, Han Zhang, Yue Zhang, Daniel Harabor, Sven Koenig, Cathy Wu, and Jingjin Yu. The league of robot runners competition: Goals, designs, and implementation. InPro- ceedings of International Conference on Automated Plan- ning and Scheduling (ICAPS),
work page 2024
-
[3]
[Dresner and Stone, 2008] Kurt Dresner and Peter Stone. A multiagent approach to autonomous intersection manage- ment.Journal of Artificial Intelligence Research (JAIR),
work page 2008
-
[4]
On multiple moving objects.Al- gorithmica,
[Erdmann and Lozano-Perez, 1987] Michael Erdmann and Tomas Lozano-Perez. On multiple moving objects.Al- gorithmica,
work page 1987
-
[5]
[Hartet al., 1968 ] Peter E. Hart, Nils J. Nilsson, and Bertram Raphael. A formal basis for the heuristic determination of minimum cost paths.IEEE Transactions on Systems Science and Cybernetics,
work page 1968
-
[6]
[H¨oniget al., 2016 ] Wolfgang H ¨onig, T. K. Satish Kumar, Liron Cohen, Hang Ma, Hong Xu, Nora Ayanian, and Sven Koenig. Multi-agent path finding with kinematic constraints. InProceedings of International Conference on Automated Planning and Scheduling (ICAPS),
work page 2016
-
[7]
Conveyor Parcel Routing with Order-Contiguous Arrivals
[Kato and Okumura, 2026] Takuro Kato and Keisuke Oku- mura. Conveyor parcel routing with order-contiguous ar- rivals.arXiv preprint arXiv:2605.13035,
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[8]
Stuckey, Hang Ma, and Sven Koenig
[Liet al., 2021a ] Jiaoyang Li, Zhe Chen, Yi Zheng, Shao- Hung Chan, Daniel Harabor, Peter J. Stuckey, Hang Ma, and Sven Koenig. Scalable rail planning and replan- ning: Winning the 2020 flatland challenge. InProceed- ings of International Conference on Automated Planning and Scheduling (ICAPS),
work page 2020
-
[9]
[Liet al., 2022 ] Jiaoyang Li, Zhe Chen, Daniel Harabor, Pe- ter J. Stuckey, and Sven Koenig. Mapf-lns2: Fast repairing for multi-agent path finding via large neighborhood search. InProceedings of AAAI Conference on Artificial Intelli- gence (AAAI),
work page 2022
-
[10]
Multi-agent path finding with priority for cooperative automated valet parking
[Okosoet al., 2019 ] Ayano Okoso, Keisuke Otaki, and Tomoki Nishi. Multi-agent path finding with priority for cooperative automated valet parking. InITSC,
work page 2019
-
[11]
[Okumuraet al., 2022 ] Keisuke Okumura, Manao Machida, Xavier D ´efago, and Yasumasa Tamura. Priority inheri- tance with backtracking for iterative multi-agent path find- ing.Artificial Intelligence (AIJ),
work page 2022
-
[12]
[Sharonet al., 2015 ] Guni Sharon, Roni Stern, Ariel Felner, and Nathan R. Sturtevant. Conflict-based search for opti- mal multi-agent pathfinding.Artificial Intelligence (AIJ),
work page 2015
-
[13]
[Silver, 2005] David Silver. Cooperative pathfinding. InPro- ceedings of AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment (AIIDE),
work page 2005
-
[14]
Finding optimal so- lutions to cooperative pathfinding problems
[Standley, 2010] Trevor Scott Standley. Finding optimal so- lutions to cooperative pathfinding problems. InProceed- ings of AAAI Conference on Artificial Intelligence (AAAI),
work page 2010
-
[15]
[Sternet al., 2019 ] Roni Stern, Nathan Sturtevant, Ariel Fel- ner, Sven Koenig, Hang Ma, Thayne Walker, Jiaoyang Li, Dor Atzmon, Liron Cohen, T. K. Satish Kumar, et al. Multi-agent pathfinding: Definitions, variants, and bench- marks. InProceedings of Annual Symposium on Combi- natorial Search (SoCS),
work page 2019
-
[16]
[Wenet al., 2022 ] Licheng Wen, Yong Liu, and Hongliang Li. Cl-mapf: Multi-agent path finding for car-like robots with kinematic and spatiotemporal constraints.Robotics and Autonomous Systems,
work page 2022
-
[17]
Wurman, Raffaello D’Andrea, and Mick Mountz
[Wurmanet al., 2008 ] Peter R. Wurman, Raffaello D’Andrea, and Mick Mountz. Coordinating hun- dreds of cooperative, autonomous vehicles in warehouses. AI Magazine,
work page 2008
-
[18]
Multi- agent motion planning for differential drive robots through stationary state search
[Yan and Li, 2025] Jingtian Yan and Jiaoyang Li. Multi- agent motion planning for differential drive robots through stationary state search. InProceedings of AAAI Confer- ence on Artificial Intelligence (AAAI),
work page 2025
-
[19]
[Yanet al., 2025 ] Jingtian Yan, Zhifei Li, William Kang, Stephen F Smith, and Jiaoyang Li. Analyzing planner de- sign trade-offs for mapf under realistic simulation.arXiv preprint arXiv:2512.09736,
-
[20]
Enhancing pibt via multi-action op- erations
[Yukhnevich and Andreychuk, 2026] Egor Yukhnevich and Anton Andreychuk. Enhancing pibt via multi-action op- erations. InProceedings of AAAI Conference on Artificial Intelligence (AAAI),
work page 2026
-
[21]
[Zhanget al., 2023 ] Yue Zhang, Daniel Harabor, Pierre Le Bodic, and Peter J. Stuckey. Efficient multi agent path finding with turn actions. InProceedings of Annual Sym- posium on Combinatorial Search (SoCS),
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.