Efficient Sparse-to-Dense Visual Localization via Compact Gaussian Scene Representation and Accelerated Dense Pose Estimation
Pith reviewed 2026-05-20 12:45 UTC · model grok-4.3
The pith
LiteLoc decouples color from features in 3D Gaussian Splatting to cut storage by 94 percent and condenses matches to 5 percent for a 19-fold speedup in pose estimation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
LiteLoc constructs a color-free decoupled feature field by retaining only task-essential feature attributes in the Gaussian representation, thereby eliminating approximately 94 percent of redundant storage with no loss of localization-relevant information, and applies a condensing strategy that distills dense matches into a 5 percent subset of representative matches to enable nearly 19-fold speedup in robust estimation with negligible performance drop.
What carries the argument
The color-free decoupled feature field, which removes the photometric color attributes inherited from Feature 3DGS to produce a compact Gaussian scene representation focused solely on localization features.
If this is right
- Scene storage for localization drops dramatically while retaining full localization capability.
- Robust pose estimation becomes fast enough for latency-sensitive applications without sacrificing match quality.
- Training the feature field becomes simpler and more stable because the optimization is no longer coupled to high-frequency color reconstruction.
- The method remains compatible with existing 3D Gaussian Splatting pipelines but requires only the feature attributes.
Where Pith is reading between the lines
- Similar decoupling of task-irrelevant attributes could be applied to other neural scene representations used for geometry tasks.
- The condensing strategy might generalize to other dense matching pipelines where many correspondences carry redundant constraints.
- In resource-constrained robotics settings the reduced memory footprint could allow larger environments to be represented on embedded hardware.
Load-bearing premise
The color field provides no localization-relevant information, so its removal causes no drop in accuracy or robustness.
What would settle it
Running the full STDLoc pipeline versus the color-free LiteLoc version on identical scenes and reporting whether localization success rate or pose error changes beyond the reported negligible margin.
Figures

read the original abstract
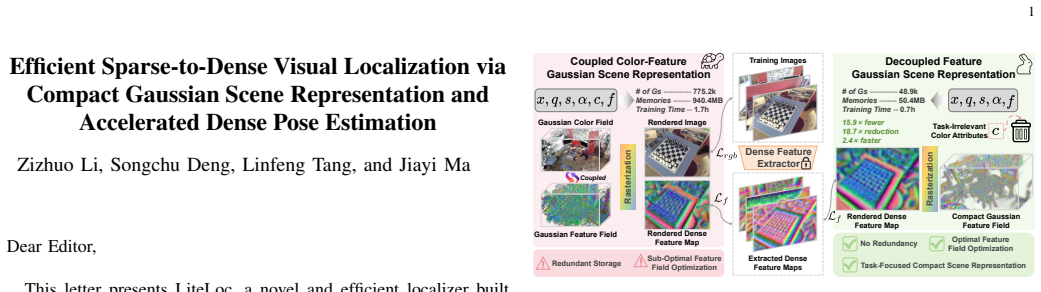
This letter presents LiteLoc, a novel and efficient localizer built on 3D Gaussian Splatting (3DGS). The previous state-of-the-art (SoTA) sparse-to-dense localizer, STDLoc, has shown remarkable localization capability but suffers from severe storage redundancy and computational latency. By revisiting its design decisions, we derive two simple yet highly effective improvements that cumulatively make LiteLoc much more efficient in both memory and computation, while also being easier to train. One key observation is that the color field, inherited directly from Feature 3DGS, is functionally useless for localization. Yet, its reconstruction of high-frequency photometric details necessitates excessive Gaussian primitives, resulting in a tightly coupled color-feature representation with significant memory overhead and sub-optimal feature field optimization. To resolve this, we propose a color-free decoupled feature field that constructs a compact Gaussian scene representation by retaining only task-essential feature attributes, thereby eliminating approximately 94% of redundant storage with no loss of localization-relevant information. We further find that the primary computational bottleneck lies in the dense Perspective-n-Point (PnP) solver, where most matches contribute saturated geometric constraints with diminishing accuracy gains. Accordingly, we propose a condensing strategy that distills dense matches into a subset of 5% representative matches, enabling a nearly 19-fold speedup in robust estimation with negligible performance drop. Extensive experiments show that LiteLoc surpasses STDLoc in multiple scenes with considerable efficiency benefits, opening up exciting prospects for latency-sensitive visual localization.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents LiteLoc, an efficient sparse-to-dense visual localizer built on 3D Gaussian Splatting. It improves on the prior STDLoc by deriving two changes: (1) a color-free decoupled feature field that retains only task-essential attributes, claimed to eliminate ~94% redundant storage with no loss of localization-relevant information, and (2) a condensing strategy that distills dense matches to a 5% subset for ~19-fold speedup in robust PnP estimation with negligible performance drop. Experiments reportedly show LiteLoc surpassing STDLoc across multiple scenes while delivering substantial memory and runtime gains.
Significance. If the empirical claims are substantiated, the work offers a practical advance for latency-sensitive visual localization by reducing both storage overhead and computational cost in 3DGS-based pipelines. The decoupling of color from features and the match-condensation heuristic address clear bottlenecks in prior systems and could inform compact scene representations for robotics and AR applications.
major comments (2)
- [Abstract and §3] Abstract and §3 (method): The central premise that 'the color field, inherited directly from Feature 3DGS, is functionally useless for localization' and that its removal incurs 'no loss of localization-relevant information' is load-bearing for the 94% storage-reduction claim, yet the manuscript provides no direct ablation isolating the effect on the feature field itself (e.g., feature reconstruction error, match-quality metrics, or gradient-flow statistics before/after color removal). Joint optimization of color and features over the same primitives means decoupling may alter primitive density or covariance; without these controls the lossless assumption remains untested.
- [§4] §4 (experiments): Reported localization metrics and speedups lack error bars, dataset splits, or statistical significance tests. The abstract cites concrete percentages (94% storage, 19-fold speedup) but the experimental section does not clarify whether these are single-run point estimates or averaged over multiple initializations and scenes, undermining reproducibility of the 'negligible performance drop' assertion.
minor comments (2)
- [§3.3] Notation for the condensed match subset (5% representative matches) should be defined explicitly with an equation or algorithm box rather than described only in prose.
- [§4] Figure captions and tables should include the exact scene names, number of query images, and baseline configurations used for each reported metric to allow direct comparison with STDLoc.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment point by point below and indicate the revisions we will incorporate.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3 (method): The central premise that 'the color field, inherited directly from Feature 3DGS, is functionally useless for localization' and that its removal incurs 'no loss of localization-relevant information' is load-bearing for the 94% storage-reduction claim, yet the manuscript provides no direct ablation isolating the effect on the feature field itself (e.g., feature reconstruction error, match-quality metrics, or gradient-flow statistics before/after color removal). Joint optimization of color and features over the same primitives means decoupling may alter primitive density or covariance; without these controls the lossless assumption remains untested.
Authors: We thank the referee for this observation. While our end-to-end comparisons demonstrate that LiteLoc preserves localization accuracy relative to STDLoc despite the storage reduction, we agree that a more isolated analysis of the color-decoupling step would strengthen the claim. In the revised manuscript we will add an ablation that directly compares feature reconstruction error, match-quality metrics, and gradient statistics before versus after color removal, along with quantitative changes in primitive density and covariance. This will provide explicit controls for the lossless assumption. revision: yes
-
Referee: [§4] §4 (experiments): Reported localization metrics and speedups lack error bars, dataset splits, or statistical significance tests. The abstract cites concrete percentages (94% storage, 19-fold speedup) but the experimental section does not clarify whether these are single-run point estimates or averaged over multiple initializations and scenes, undermining reproducibility of the 'negligible performance drop' assertion.
Authors: We agree that additional statistical detail would improve reproducibility. The percentages reported in the abstract are averages computed across scenes; we will state this explicitly in the revised experimental section. We will also add error bars (standard deviations over multiple runs), clarify the dataset splits employed, and include statistical significance tests for the key accuracy and efficiency comparisons. revision: yes
Circularity Check
No significant circularity; derivation chain remains self-contained
full rationale
The paper motivates its two improvements by direct observations on the design of prior systems (STDLoc and the color field from Feature 3DGS), then validates the resulting compact representation and match-condensing strategy through comparative experiments on localization metrics. No equations or parameters are fitted to a data subset and later re-presented as independent predictions; the 94% storage reduction and 19-fold speedup are reported outcomes rather than quantities defined by construction from the authors' own earlier constants. The central premise that the color field is functionally useless for localization is stated as an empirical observation, not derived via a self-referential loop or uniqueness theorem imported from the same authors' prior work. The derivation therefore does not reduce to its inputs and is supported by external experimental benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption 3D Gaussian Splatting representations can be used to extract task-specific features for localization
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
One key observation is that the color field, inherited directly from Feature 3DGS, is functionally useless for localization... color-free decoupled feature field... eliminating approximately 94% of redundant storage
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Deep learning for visual localization and mapping: A survey,
C. Chen, B. Wang, C. X. Lu, N. Trigoni, A. Markham, “Deep learning for visual localization and mapping: A survey,”IEEE TNNLS, vol. 34, no. 9, pp. 5346–5365, 2023
work page 2023
-
[2]
Feature matching via topology-aware graph interaction model,
Y . Lu, J. Ma, X. Mei, J. Huang, X.-P. Zhang, “Feature matching via topology-aware graph interaction model,”IEEE/CAA JAS, vol. 11, no. 1, pp. 113–130, 2024
work page 2024
-
[3]
Structure-from-motion revisited,
J. L. Schonberger, J.-M. Frahm, “Structure-from-motion revisited,”In CVPR, pp. 4104–4113, 2016
work page 2016
-
[4]
Superpoint: Self-supervised interest point detection and description,
D. DeTone, T. Malisiewicz, A. Rabinovich, “Superpoint: Self-supervised interest point detection and description,”In CVPR, pp. 224–236, 2018
work page 2018
-
[5]
Efficient & effective prioritized matching for large-scale image-based localization,
T. Sattler, B. Leibe, L. Kobbelt, “Efficient & effective prioritized matching for large-scale image-based localization,”IEEE TPAMI, vol. 39, pp. 1744–1756, 2016
work page 2016
-
[6]
From coarse to fine: Robust hierarchical localization at large scale,
P.-E. Sarlin, C. Cadena, R. Siegwart, M. Dymczyk, “From coarse to fine: Robust hierarchical localization at large scale,”In CVPR, pp. 12716– 12725, 2019
work page 2019
-
[7]
Visual camera re-localization from RGB and RGB-D images using DSAC,
E. Brachmann, C. Rother, “Visual camera re-localization from RGB and RGB-D images using DSAC,”IEEE TPAMI, vol. 44, pp. 5847–5865, 2021
work page 2021
-
[8]
Accelerated coordinate encoding: Learning to relocalize in minutes using RGB and poses,
E. Brachmann, T. Cavallari, V . A. Prisacariu, “Accelerated coordinate encoding: Learning to relocalize in minutes using RGB and poses,”In CVPR, pp. 5044–5053, 2023
work page 2023
-
[9]
Neumap: Neural coordinate mapping by auto-transdecoder for camera localization,
S. Tang, S. Tang, A. Tagliasacchi, P. Tan, Y . Furukawa, “Neumap: Neural coordinate mapping by auto-transdecoder for camera localization,”In CVPR, pp. 929–939, 2023
work page 2023
-
[10]
Neural refinement for absolute pose regression with feature synthesis,
S. Chen, Y . Bhalgat, X. Li, J.-W. Bian, K. Li, Z. Wang, V . A. Prisacariu, “Neural refinement for absolute pose regression with feature synthesis,” In CVPR, pp. 20987–20996, 2024
work page 2024
-
[11]
Crossfire: Camera relocalization on self-supervised features from an implicit representation,
A. Moreau, N. Piasco, M. Bennehar, D. Tsishkou, B. Stanciulescu, A. de La Fortelle, “Crossfire: Camera relocalization on self-supervised features from an implicit representation,”In ICCV, pp. 252–262, 2023
work page 2023
-
[12]
Pnerfloc: Visual localization with point-based neural radiance fields,
B. Zhao, L. Yang, M. Mao, H. Bao, Z. Cui, “Pnerfloc: Visual localization with point-based neural radiance fields,”In AAAI, pp. 7450–7459, 2024
work page 2024
-
[13]
The nerfect match: Exploring NeRF features for visual localization,
Q. Zhou, M. Maximov, O. Litany, L. Leal-Taix ´e, “The nerfect match: Exploring NeRF features for visual localization,”In ECCV, pp. 108–127, 2024
work page 2024
-
[14]
Z. Huang, H. Yu, Y . Shentu, J. Yuan, G. Zhang, “From Sparse to Dense: Camera Relocalization with Scene-Specific Detector from Feature Gaus- sian Splatting,”In CVPR, pp. 27059–27069, 2025
work page 2025
-
[15]
GSVisLoc: Generalizable Visual Localization for Gaussian Splatting Scene Representations,
F. Khatib, D. Moran, G. Trostianetsky, Y . Kasten, M. Galun, R. Basri, “GSVisLoc: Generalizable Visual Localization for Gaussian Splatting Scene Representations,”In ICCVW, 2025
work page 2025
-
[16]
Feature 3DGS: Supercharging 3D Gaussian Splatting to enable distilled feature fields,
S. Zhou, H. Chang, S. Jiang, Z. Fan, Z. Zhu, D. Xu, P. Chari, S. You, Z. Wang, A. Kadambi, “Feature 3DGS: Supercharging 3D Gaussian Splatting to enable distilled feature fields,”In CVPR, pp. 21676–21685, 2024
work page 2024
-
[17]
M. Douze, A. Guzhva, C. Deng, J. Johnson, G. Szilvasy, P.-E. Mazar ´e, M. Lomeli, L. Hosseini, H. J ´egou, “The Faiss library,”IEEE TBD, 2025
work page 2025
-
[18]
Scene coordinate regression forests for camera relocalization in RGB-D images,
J. Shotton, B. Glocker, C. Zach, S. Izadi, A. Criminisi, A. Fitzgibbon, “Scene coordinate regression forests for camera relocalization in RGB-D images,”In CVPR, pp. 2930–2937, 2013
work page 2013
-
[19]
PoseNet: A convolutional network for real-time 6-DoF camera relocalization,
A. Kendall, M. Grimes, R. Cipolla, “PoseNet: A convolutional network for real-time 6-DoF camera relocalization,”In ICCV, pp. 2938–2946, 2015
work page 2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.