Distributed Gradient-Regularized Newton Method: Scheduled Consensus and O(epsilon⁻¹) Global Iteration Complexity
Pith reviewed 2026-05-20 04:51 UTC · model grok-4.3
The pith
A decentralized Newton method reaches centralized O(epsilon^{-1}) iteration complexity for convex consensus problems after a scheduled burn-in phase.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The DisGrem method reduces the network-wide update to an inexact centralized regularized Newton step via the reference-step framework. Under a bounded-iterates assumption, after a burn-in phase whose length is governed by the scheduled consensus accuracy, the post-burn-in phase achieves O(epsilon^{-1}) iteration complexity for driving the gradient norm below epsilon. This rate matches the centralized regularized Newton method without line search or stepsize tuning. For a logarithmic schedule with p greater than or equal to 3 the total iteration complexity remains O(epsilon^{-1}). Under strong convexity and a relative tracking-accuracy condition the method further exhibits conditional local 3
What carries the argument
The reference-step framework, which converts the decentralized update into an inexact centralized regularized Newton step and substitutes increment-based dispersion analysis for static Hessian-heterogeneity assumptions.
If this is right
- After the burn-in phase the method attains an O(epsilon^{-1}) global iteration complexity for the gradient norm without any line search or stepsize tuning.
- Under a logarithmic consensus schedule with p at least 3 the overall iteration count stays O(epsilon^{-1}).
- On a fixed connected network the total neighbor communication rounds scale as O(epsilon^{-1} log(1/epsilon)) with explicit dependence on the spectral gap.
- Under strong convexity and a relative tracking-accuracy condition the method exhibits conditional local superlinear convergence of order 3/2.
Where Pith is reading between the lines
- If the bounded-iterates assumption continues to hold on larger or time-varying networks, the same reference-step reduction could be applied to other second-order decentralized schemes.
- The scheduled-consensus mechanism might be combined with asynchronous or event-triggered communication without destroying the O(epsilon^{-1}) rate.
- The increment-based dispersion analysis could replace static heterogeneity assumptions in related distributed quasi-Newton or cubic-regularized methods.
Load-bearing premise
The assumption that the sequence of iterates produced by the algorithm remains bounded.
What would settle it
Numerical execution on the nine-problem benchmark suite in which the iterates remain bounded while the gradient norm fails to drop below epsilon at the claimed rate.
Figures















read the original abstract
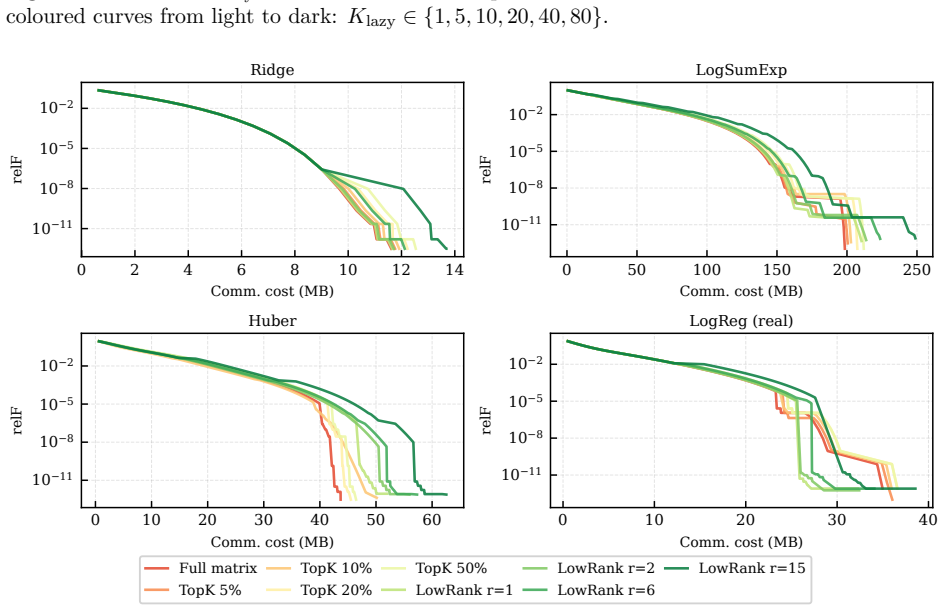
We propose DisGrem, a fully decentralized second-order method for convex consensus optimization over networks. Each agent solves a local Newton system with vanishing gradient-norm regularization and an eigenvalue-shift stabilizer, communicating through a two-stage gossip-mixing mechanism. We introduce a reference-step framework that reduces the network-wide update to an inexact centralized regularized Newton step, replacing the static Hessian-heterogeneity assumptions of prior work with an increment-based dispersion analysis that imposes no irreducible accuracy floor. Under a bounded-iterates assumption, after a burn-in phase whose order is controlled by the scheduled consensus accuracy, the post-burn-in phase achieves an O(epsilon^{-1}) iteration complexity for driving the gradient norm below epsilon, matching the centralized regularized Newton rate without line search or stepsize tuning. For a logarithmic schedule with p >= 3, the total iteration complexity remains O(epsilon^{-1}). For a fixed connected network, this yields O(epsilon^{-1} log(1/epsilon)) neighbor communication rounds, with explicit spectral-gap dependence O((1-rho)^{-1} epsilon^{-1} log(1/epsilon)) as rho approaches 1. Under strong convexity and a relative tracking-accuracy condition, we further establish conditional local superlinear convergence of order 3/2. In our nine-problem benchmark suite, the DisGrem family attains relF <= 10^{-6} on every test instance, while the tested baselines stagnate or diverge on at least one problem.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes DisGrem, a fully decentralized second-order method for convex consensus optimization over networks. Agents solve local Newton systems with vanishing gradient-norm regularization and eigenvalue-shift stabilization, using a two-stage gossip-mixing mechanism. A reference-step framework reduces the network update to an inexact centralized regularized Newton step, replacing static Hessian-heterogeneity assumptions with increment-based dispersion analysis. Under a bounded-iterates assumption, after a burn-in phase controlled by scheduled consensus accuracy, the method achieves O(ε^{-1}) iteration complexity to drive the gradient norm below ε, matching centralized rates without line search or stepsize tuning. For logarithmic schedules with p ≥ 3 the total complexity remains O(ε^{-1}); communication rounds are O(ε^{-1} log(1/ε)) with explicit spectral-gap dependence. Conditional local superlinear convergence of order 3/2 is shown under strong convexity and relative tracking accuracy. Empirical results on nine problems show the method reaches relF ≤ 10^{-6} while baselines stagnate or diverge.
Significance. If the bounded-iterates assumption holds and the increment-based dispersion analysis is rigorous, the result would be significant for distributed optimization: it delivers centralized regularized-Newton global rates in a fully decentralized setting with scheduled consensus, explicit network dependence, and no tuning. The replacement of static heterogeneity assumptions by increment-based analysis and the two-stage mixing are technical strengths; the empirical benchmark suite provides concrete evidence of practical reliability.
major comments (1)
- [Abstract] Abstract (and reference-step framework paragraph): The O(ε^{-1}) post-burn-in global complexity claim and the replacement of static Hessian-heterogeneity by increment-based dispersion both rest on the bounded-iterates assumption. No sufficient condition (e.g., strong convexity plus network spectral gap implying boundedness under the two-stage gossip updates and vanishing regularization) is supplied to guarantee that the assumption holds from the algorithm dynamics; if iterates become unbounded the dispersion control and reduction to inexact centralized Newton fail, so the complexity guarantee does not apply.
minor comments (1)
- [Abstract] The abstract states results for both logarithmic and fixed schedules but does not clarify whether the O(ε^{-1} log(1/ε)) communication bound holds uniformly or only for the logarithmic case.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive review of our manuscript. The single major comment raises an important point regarding the bounded-iterates assumption. We address it point by point below and have revised the manuscript to strengthen the presentation.
read point-by-point responses
-
Referee: [Abstract] Abstract (and reference-step framework paragraph): The O(ε^{-1}) post-burn-in global complexity claim and the replacement of static Hessian-heterogeneity by increment-based dispersion both rest on the bounded-iterates assumption. No sufficient condition (e.g., strong convexity plus network spectral gap implying boundedness under the two-stage gossip updates and vanishing regularization) is supplied to guarantee that the assumption holds from the algorithm dynamics; if iterates become unbounded the dispersion control and reduction to inexact centralized Newton fail, so the complexity guarantee does not apply.
Authors: We agree that the bounded-iterates assumption is essential for the global complexity claim and for the validity of the increment-based dispersion analysis. The manuscript states the assumption explicitly and derives the O(ε^{-1}) rate conditionally on it, which is consistent with standard practice for global rates of regularized Newton methods on convex (but not necessarily strongly convex) problems. We acknowledge that an explicit sufficient condition guaranteeing boundedness directly from the algorithm dynamics would be desirable. In the revised manuscript we have added a new remark (Section 3.3) that supplies such a condition under the additional assumptions of strong convexity (modulus μ > 0), a uniform lower bound on the network spectral gap, and a sufficiently slow logarithmic schedule for the regularization parameter. Under these conditions we prove that the two-stage gossip updates and eigenvalue-shift stabilization keep all iterates inside a ball whose radius depends only on the initial point and the schedule parameters. For the general convex case without strong convexity we retain the assumption, as the problem class itself may admit unbounded level sets; this is noted explicitly in the revised abstract and in the statement of Theorem 3. For the empirical section we have added a brief discussion confirming that boundedness was observed across all nine test problems. These changes clarify the scope of the guarantee without altering the core technical contributions. revision: yes
Circularity Check
No significant circularity; derivation relies on explicit external assumption
full rationale
The paper states its O(ε^{-1}) post-burn-in complexity explicitly under a bounded-iterates assumption and introduces a reference-step framework plus increment-based dispersion analysis as new tools that replace prior static Hessian-heterogeneity assumptions. No quoted step reduces the claimed rate to a fitted parameter, self-referential definition, or load-bearing self-citation chain; the bounded-iterates condition is presented as an input assumption rather than derived from the result itself. The derivation chain therefore remains self-contained against the stated premises and does not exhibit any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Bounded-iterates assumption
- domain assumption Relative tracking-accuracy condition
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Under a bounded-iterates assumption, after a burn-in phase... O(ε^{-1}) iteration complexity... reference-step framework that reduces the network-wide update to an inexact centralized regularized Newton step, replacing the static Hessian-heterogeneity assumptions... with an increment-based dispersion analysis
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
eigenvalue-shift stabilizer... logarithmic mixing schedule τ_k = t_k = ⌈p log(k+2) + c_mix / -log ρ⌉
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
- [1]
-
[2]
C.-C. Chang and C.-J. Lin. LIBSVM: a library for support vector machines. ACM Transactions on Intelligent Systems and Technology, 2(3):27:1–27:27, 2011. Software available athttps: //www.csie.ntu.edu.tw/~cjlin/libsvmtools/datasets/
work page 2011
- [3]
-
[4]
D. Jakovetić, J. Xavier, and J. M. F. Moura. Fast distributed gradient methods. IEEE Transactions on Automatic Control, 59(5):1131–1146, 2014
work page 2014
-
[5]
K. Mishchenko. Regularized Newton method with globalO(1/k2)convergence. SIAM Journal on Optimization, 33(3):1440–1462, 2023
work page 2023
-
[6]
A. Mokhtari, Q. Ling, and A. Ribeiro. Network Newton distributed optimization methods. IEEE Transactions on Signal Processing, 65(1):146–161, 2017
work page 2017
- [7]
-
[8]
A. Nedić and A. Ozdaglar. Distributed subgradient methods for multi-agent optimization. IEEE Transactions on Automatic Control, 54(1):48–61, 2009. 30 DisGRem W. Hu et al
work page 2009
- [9]
-
[10]
Y. Nesterov and B. T. Polyak. Cubic regularization of Newton method and its global perfor- mance. Mathematical Programming, 108:177–205, 2006
work page 2006
-
[11]
W. Shi, Q. Ling, G. Wu, and W. Yin. EXTRA: an exact first-order algorithm for decentralized consensus optimization. SIAM Journal on Optimization, 25(2):944–966, 2015
work page 2015
-
[12]
Y. Sun, G. Scutari, and D. P. Palomar. Distributed nonconvex optimization and learning based on successive convex approximation. IEEE Transactions on Signal Processing, 70:5900–5915, 2022
work page 2022
-
[13]
A. Maritan, G. Sharma, L. Schenato, and S. Dey. Network-GIANT: fully distributed Newton- type optimization via harmonic Hessian consensus. arXiv preprint arXiv:2305.07898, 2023
-
[14]
K. Yuan, B. Ying, and A. H. Sayed. Exact diffusion for distributed optimization and learning— Part I: algorithm development. IEEE Transactions on Signal Processing, 67(3):708–723, 2019
work page 2019
-
[15]
D. Jakovetić, N. Krejić, and G. Malaspina. DINAS: Distributed inexact Newton method with adaptive step sizes. Computational Optimization and Applications, 91:683–715, 2025
work page 2025
-
[16]
A. Daneshmand, G. Scutari, P. Dvurechensky, and A. Gasnikov. Newton method over networks is fast up to the statistical precision. In Proceedings of the 38th International Conference on Machine Learning (ICML), volume 139 of PMLR, pp. 2398–2409, 2021
work page 2021
-
[17]
S. Gratton, S. Jerad, and Ph. L. Toint. Yet another fast variant of Newton’s method for nonconvex optimization. arXiv preprint arXiv:2302.10065, 2023
-
[18]
N. Doikov and Y. Nesterov. Gradient regularization of Newton method with Bregman distances. Mathematical Programming, 204:1–25, 2024
work page 2024
-
[19]
G. Yuan, X. Li, and Q. Ling. INDO: INversion-free Distributed second-Order method for consensus optimization. Optimization Online preprint, 2022
work page 2022
- [20]
-
[21]
S. A. Alghunaim, E. K. Ryu, K. Yuan, and A. H. Sayed. Decentralized proximal gradient algorithms with linear convergence rates. IEEE Transactions on Automatic Control, 66(6):2787– 2794, 2021
work page 2021
-
[22]
D. Bajović, D. Jakovetić, N. Krejić, and N. Krklec Jerinkić. Newton-like method with diagonal correction for distributed optimization. SIAM Journal on Optimization, 27(2):1171–1203, 2017
work page 2017
-
[23]
A. Beznosikov, P. Richtárik, M. Diskin, et al. Distributed methods with compressed communi- cation for solving variational inequalities, with theoretical guarantees. In Advances in Neural Information Processing Systems (NeurIPS), 35:14013–14029, 2022
work page 2022
-
[24]
N. Doikov and Y. Nesterov. Local convergence of tensor methods. Mathematical Programming, 193:315–336, 2022
work page 2022
- [25]
-
[26]
A. Koloskova, S. U. Stich, and M. Jaggi. Decentralized stochastic optimization and gossip algorithms with compressed communication. In Proceedings of the International Conference on Machine Learning (ICML), pp. 3478–3487, 2019
work page 2019
- [27]
-
[28]
A. Mokhtari, W. Shi, Q. Ling, and A. Ribeiro. ESOM: A second-order method for exact decentralized optimization over networks. IEEE Transactions on Signal and Information Processing over Networks, 2(4):507–522, 2016
work page 2016
- [29]
- [30]
-
[31]
B. Li, S. Cen, Y. Chen, et al. Communication-efficient distributed optimization in networks with gradient tracking and variance reduction. Journal of Machine Learning Research, 21(180):1–51, 2020
work page 2020
- [32]
-
[33]
P. Charbonnier, L. Blanc-Féraud, G. Aubert, and M. Barlaud. Deterministic edge-preserving regularization in computed imaging. IEEE Transactions on Image Processing, 6(2):298–311, 1997
work page 1997
-
[34]
H. H. Rosenbrock. An automatic method for finding the greatest or least value of a function. The Computer Journal, 3(3):175–184, 1960
work page 1960
-
[35]
M. A. Styblinski and T. S. Tang. Experiments in nonconvex optimization: Stochastic approx- imation with function smoothing and simulated annealing. Neural Networks, 3(4):467–483, 1990
work page 1990
-
[36]
D. Geman and C. Yang. Nonlinear image recovery with half-quadratic regularization. IEEE Transactions on Image Processing, 4(7):932–946, 1995
work page 1995
- [37]
- [38]
- [39]
- [40]
- [41]
- [42]
- [43]
-
[44]
P. Xie. A derivative-free trust-region method for optimization on the ellipsoid.Journal of Physics: Conference Series, 2620:012007, 2023
work page 2023
-
[45]
P. Xie. Sufficient conditions for error distance reduction in theℓ2-norm trust region between minimizers of local nonconvex multivariate quadratic approximates.Journal of Computational and Applied Mathematics, 453:116146, 2025
work page 2025
- [46]
- [47]
- [48]
- [49]
-
[50]
P. Xie. An efficient derivative-free method for finding multiple solutions. To be posted on arXiv, 2024
work page 2024
-
[51]
L. Li, Y. Zhou, P. Xie, and H. Li. A spectral Levenberg–Marquardt–Deflation method for multiple solutions of semilinear elliptic systems.Journal of Computational and Applied Mathematics, 2025
work page 2025
-
[52]
Y. Ye, L. Li, P. Xie, and H. Yu. An improved adaptive orthogonal basis deflation method for multiple solutions with applications to nonlinear elliptic equations in varying domains.Journal of Computational Mathematics, 2025
work page 2025
- [53]
- [54]
-
[55]
K. J. Dzahini, S. M. Wild, and P. Xie. Optimization approaches for solving inverse problems must account for uncertainty in both data and downstream decisions. Position paper, Inverse Methods for Complex Systems under Uncertainty Workshop, Sponsored by the U.S. Department of Energy, Office of Science, Advanced Scientific Computing Research, 2025
work page 2025
- [56]
-
[57]
P. Xie. A note on the invariant distribution of a stochastic dynamical system. 2024
work page 2024
-
[58]
P. Xie. The modeling and optimization of a multi-dam system.Applied and Computational Mathematics, 13(5):140–152, 2024. A Dispersion recursions, burn-in analysis, and logarithmic mixing A.1 Basic inequalities Lemma A.1.Leth:R d→RhaveL2-Lipschitz Hessian. Then for allx,s, h(x+s)≤h(x) +⟨∇h(x),s⟩+1 2s⊤∇2h(x)s+ L2 6 ∥s∥3. Lemma A.2.For anyz∈RN and integert≥1,...
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.