REACH: Hand Pose Estimation from Room Corners
Pith reviewed 2026-05-22 07:29 UTC · model grok-4.3
The pith
Transformer model recovers accurate 3D hand shapes and poses from distant low-resolution room-corner views by linking hand and body features over time.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that accurate 3D hand pose estimation from afar becomes possible once hand-body coordination is modeled through per-view feature correlations in a Transformer and temporal coordination is exploited autoregressively, together with multiview observations. This is shown to work on the new REACH dataset, where 50 participants were recorded across a wide variety of daily activities with ground-truth annotations provided by concealed chest cameras.
What carries the argument
Transformer that models correlations between hand and body visual features as per-view tokens and processes their temporal coordination autoregressively.
If this is right
- Fixed room-corner cameras become sufficient for tracking hands during natural indoor activities.
- Continuous 3D hand analysis becomes feasible without close-up views or body-worn devices.
- The same coordination cues can support pose estimation under heavy occlusion and distance.
- Daily human behavior can be observed at scale in unmodified indoor spaces.
Where Pith is reading between the lines
- The same per-view token correlation and autoregressive structure could be tested on full-body pose or other articulated objects viewed from corners.
- The REACH dataset supplies a benchmark for any future method that claims robustness to real-room distance and occlusion.
- Combining the temporal coordination with audio or inertial signals might further reduce errors when visual features alone are insufficient.
Load-bearing premise
Hand-body coordination, temporal progression, and multiview observations supply enough information to reconstruct accurate hand shape and pose even when the input images are extremely low-resolution and frequently occluded.
What would settle it
Demonstration that removing either the body-hand correlation terms or the autoregressive temporal component causes large increases in pose error on the REACH test set while the full model remains accurate.
Figures







read the original abstract
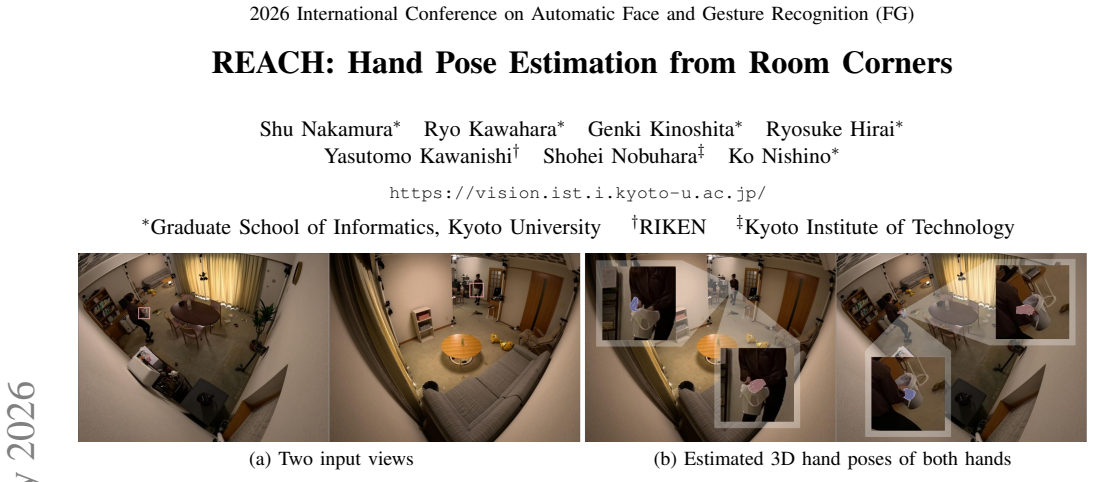
We introduce a novel 3D hand pose estimator that can accurately recover the shape and pose of people's hands in a room from afar, typically from fixed cameras at room corners, in extremely low-resolution and frequently occluded views. Our key idea is to fully leverage hand-body coordination, its temporal progression, and multiview observations. We achieve this with a novel Transformer-based model, in which hand and body configurations are modeled through correlations between their visual features expressed as per-view tokens, and their temporal coordination is exploited in an autoregressive manner. We introduce a novel dataset, which we refer to as REACH, Room-Environment dataset Annotated with Chest cameras for Hand pose estimation, to train and test our method. REACH is a first-of-its-kind large-scale hand pose dataset that captures accurate hand movements of 50 participants across a wide variety of daily activities. In order to avoid interfering with natural movements while annotating the hands with accurate shape and pose, we leverage concealed chest cameras. Through extensive experiments, including comparative studies with existing methods, we show that our model, REACH-Net, achieves highly accurate 3D hand pose estimation from afar. These results broaden the horizon of 3D hand pose estimation, especially towards "in-the-wild" continuous human behavior analysis.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces REACH-Net, a Transformer-based model for 3D hand pose estimation from room corner cameras in low-resolution and occluded conditions. It models hand and body configurations through correlations in per-view visual feature tokens and uses autoregressive temporal modeling to exploit coordination over time. The authors present the REACH dataset, a large-scale collection of hand movements from 50 participants annotated via concealed chest cameras. Through experiments, they claim that REACH-Net achieves highly accurate 3D hand pose estimation from afar, outperforming existing methods.
Significance. Should the quantitative evaluations and ablations support the claims, this work would be significant for advancing 3D hand pose estimation to more realistic 'in-the-wild' scenarios by relying on indirect body and temporal cues rather than direct high-quality hand observations. The REACH dataset could serve as a valuable benchmark for future research in this area.
major comments (2)
- [Abstract] Abstract: The assertion that REACH-Net 'achieves highly accurate 3D hand pose estimation from afar' and is superior to existing methods is not accompanied by any quantitative metrics (MPJPE, PA-MPJPE), error bars, dataset split information, or ablation results. Without these, it is impossible to verify whether hand-body feature correlations plus autoregressive temporal modeling actually recover accurate pose from the claimed low-resolution occluded corner views rather than inheriting accuracy from other sources.
- [Experiments] Experiments section: The text states that 'extensive experiments, including comparative studies with existing methods' demonstrate the result, yet no specific numbers, tables, or controls (e.g., ablation removing body coordination tokens or the temporal autoregressive component) are referenced that would test the sufficiency of the key idea on the REACH dataset.
minor comments (1)
- [Abstract] The full expansion of the dataset acronym REACH is given only after the abbreviation; spelling it out on first use would improve readability.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive comments. We address each major comment below and outline the revisions we will make to strengthen the clarity of our quantitative claims and experimental evidence.
read point-by-point responses
-
Referee: [Abstract] Abstract: The assertion that REACH-Net 'achieves highly accurate 3D hand pose estimation from afar' and is superior to existing methods is not accompanied by any quantitative metrics (MPJPE, PA-MPJPE), error bars, dataset split information, or ablation results. Without these, it is impossible to verify whether hand-body feature correlations plus autoregressive temporal modeling actually recover accurate pose from the claimed low-resolution occluded corner views rather than inheriting accuracy from other sources.
Authors: We agree that the abstract would be strengthened by including key quantitative results. In the revised manuscript we will add the main performance numbers (MPJPE and PA-MPJPE) achieved by REACH-Net, a brief statement on the train/test split of the REACH dataset, and a short reference to the ablation studies. These additions will allow readers to immediately gauge the accuracy gains from the proposed hand-body correlations and temporal modeling without needing to consult the full Experiments section. revision: yes
-
Referee: [Experiments] Experiments section: The text states that 'extensive experiments, including comparative studies with existing methods' demonstrate the result, yet no specific numbers, tables, or controls (e.g., ablation removing body coordination tokens or the temporal autoregressive component) are referenced that would test the sufficiency of the key idea on the REACH dataset.
Authors: The Experiments section already contains tables and figures reporting the comparative results and ablations on the REACH dataset. However, we accept that the narrative text does not sufficiently cross-reference these results when describing the contribution of body coordination tokens and the autoregressive temporal component. We will revise the section to add explicit pointers (e.g., “as shown in Table 3, removing the temporal autoregressive module increases MPJPE by X mm”) so that the sufficiency of the core modeling choices is directly tied to the reported numbers. revision: partial
Circularity Check
No significant circularity; standard supervised training on new dataset with independent experiments
full rationale
The paper presents REACH-Net as a Transformer model that processes per-view tokens for hand-body correlations and uses autoregressive temporal modeling to estimate 3D hand pose from corner views. It introduces the REACH dataset with chest-camera ground truth for supervision. This is a conventional data-driven pipeline with comparative experiments; no equations reduce a prediction to a fitted parameter by construction, no uniqueness theorem is imported via self-citation, and no ansatz is smuggled. The derivation chain remains self-contained against the new dataset and external baselines.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Our key idea is to fully leverage hand-body coordination, its temporal progression, and multiview observations. We achieve this with a novel Transformer-based model, in which hand and body configurations are modeled through correlations between their visual features expressed as per-view tokens, and their temporal coordination is exploited in an autoregressive manner.
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
REACH-Net integrates visual features of the hands, the body, and body posture from different views in an encoder-decoder Transformer architecture
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
P. Banerjee, S. Shkodrani, P. Moulon, S. Hampali, S. Han, F. Zhang, L. Zhang, J. Fountain, E. Miller, S. Basol, R. New- combe, R. Wang, J. J. Engel, and T. Hodan. HOT3D: Hand and object tracking in 3D from egocentric multi-view videos. IEEE Conf. Comput. Vis. Pattern Recog., 2025
work page 2025
-
[2]
Y . Ben-Shabat, X. Yu, F. Saleh, D. Campbell, C. Rodriguez- Opazo, H. Li, and S. Gould. The ikea asm dataset: Under- standing people assembling furniture through actions, objects and pose. InIEEE Winter Conf. on Applic. of Comput. Vis., pages 847–859, January 2021
work page 2021
-
[3]
A. Bonnetto, H. Qi, F. Leong, M. Tashkovska, M. Rad, S. Shokur, F. Hummel, S. Micera, M. Pollefeys, and A. Mathis. Epfl-smart-kitchen-30: Densely annotated cooking dataset with 3d kinematics to challenge video and language models.arXiv preprint arXiv:2506.01608, 2025
-
[4]
S. Brahmbhatt, C. Tang, C. D. Twigg, C. C. Kemp, and J. Hays. ContactPose: A dataset of grasps with object contact and hand pose. InEur. Conf. Comput. Vis., August 2020
work page 2020
- [5]
-
[6]
Y .-W. Chao, W. Yang, Y . Xiang, P. Molchanov, A. Handa, J. Tremblay, Y . S. Narang, K. Van Wyk, U. Iqbal, S. Birchfield, J. Kautz, and D. Fox. Dexycb: A benchmark for capturing hand grasping of objects. InIEEE Conf. Comput. Vis. Pattern Recog., pages 9044–9053, June 2021
work page 2021
-
[7]
L. Chen, S.-Y . Lin, Y . Xie, Y .-Y . Lin, and X. Xie. MVHM: A large-scale multi-view hand mesh benchmark for accurate 3d hand pose estimation. InIEEE Winter Conf. on Applic. of Comput. Vis., pages 836–845, 2021
work page 2021
-
[8]
J. Deng, W. Dong, R. Socher, L.-J. Li, K. Li, and L. Fei-Fei. ImageNet: A large-scale hierarchical image database. InIEEE Conf. Comput. Vis. Pattern Recog., pages 248–255, June 2009
work page 2009
-
[9]
A. Dosovitskiy, L. Beyer, A. Kolesnikov, D. Weissenborn, X. Zhai, T. Unterthiner, M. Dehghani, M. Minderer, G. Heigold, S. Gelly, J. Uszkoreit, and N. Houlsby. An image is worth 16x16 words: Transformers for image recognition at scale. In Int. Conf. Learn. Represent., 2021
work page 2021
- [10]
-
[11]
K. Fan, P. Ren, J. Wang, H. Sun, Q. Qi, Z. Zhuang, and J. Liao. Pose-guided temporal enhancement for robust low-resolution hand reconstruction. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 22627–22637, 2025
work page 2025
-
[12]
Z. Fan, O. Taheri, D. Tzionas, M. Kocabas, M. Kaufmann, M. J. Black, and O. Hilliges. ARCTIC: A dataset for dexterous bimanual hand-object manipulation. InIEEE Conf. Comput. Vis. Pattern Recog., 2023
work page 2023
-
[13]
G. Garcia-Hernando, S. Yuan, S. Baek, and T.-K. Kim. First- person hand action benchmark with rgb-d videos and 3d hand pose annotations. InIEEE Conf. Comput. Vis. Pattern Recog., June 2018
work page 2018
-
[14]
K. Grauman et al. Ego-exo4d: Understanding skilled human activity from first- and third-person perspectives. In2024 IEEE/CVF Conference on Computer Vision and Pattern Recog- nition (CVPR), pages 19383–19400, 2024
work page 2024
-
[15]
S. Hampali, M. Rad, M. Oberweger, and V . Lepetit. Honnotate: A method for 3d annotation of hand and object poses. InIEEE Conf. Comput. Vis. Pattern Recog., 2020
work page 2020
-
[16]
S. Han, P.-C. Wu, Y . Zhang, B. Liu, L. Zhang, Z. Wang, W. Si, P. Zhang, Y . Cai, T. Hodan, R. Cabezas, L. Tran, M. Akbay, T.-H. Yu, C. Keskin, and R. Wang. Umetrack: Unified multi- view end-to-end hand tracking for vr. InSIGGRAPH Asia 2022 Conference Papers, SA ’22, New York, NY , USA, 2022. Association for Computing Machinery
work page 2022
-
[17]
K. He, G. Gkioxari, P. Dollar, and R. Girshick. Mask R-CNN. InInt. Conf. Comput. Vis., pages 2961–2969, Oct. 2017
work page 2017
-
[18]
K. He, X. Zhang, S. Ren, and J. Sun. Deep residual learning for image recognition. InIEEE Conf. Comput. Vis. Pattern Recog., pages 770–778, June 2016
work page 2016
-
[19]
C.-H. P. Huang, H. Yi, M. H¨oschle, M. Safroshkin, T. Alexiadis, S. Polikovsky, D. Scharstein, and M. J. Black. Capturing and inferring dense full-body human-scene contact. InProceedings IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), pages 13274–13285, June 2022
work page 2022
- [20]
- [21]
-
[22]
H. Joo, N. Neverova, and A. Vedaldi. Exemplar fine-tuning for 3d human pose fitting towards in-the-wild 3d human pose estimation.3DV, 2021
work page 2021
-
[23]
L. Khaleghi, A. Sepas-Moghaddam, J. Marshall, and A. Etemad. Multi-view video-based 3d hand pose estimation.IEEE Transactions on Artificial Intelligence, 2022
work page 2022
-
[24]
J. Kim, J. Kim, J. Na, and H. Joo. Parahome: Parameterizing everyday home activities towards 3d generative modeling of human-object interactions, 2024
work page 2024
-
[25]
S. Liu, W. Wu, J. Wu, and Y . Lin. Spatial-temporal parallel transformer for arm-hand dynamic estimation. InIEEE Conf. Comput. Vis. Pattern Recog., pages 20523–20532, 2022
work page 2022
-
[26]
Y . Liu, Y . Liu, C. Jiang, K. Lyu, W. Wan, H. Shen, B. Liang, Z. Fu, H. Wang, and L. Yi. Hoi4d: A 4d egocentric dataset for category-level human-object interaction. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 21013–21022, June 2022
work page 2022
-
[27]
I. Loshchilov and F. Hutter. Decoupled weight decay regulariza- tion. InInternational Conference on Learning Representations, 2019
work page 2019
-
[28]
C. Lugaresi, J. Tang, H. Nash, C. McClanahan, E. Uboweja, M. Hays, F. Zhang, C.-L. Chang, M. G. Yong, J. Lee, W.-T. Chang, W. Hua, M. Georg, and M. Grundmann. Mediapipe: A framework for building perception pipelines, 2019
work page 2019
-
[29]
E. Ng, S. Ginosar, T. Darrell, and H. Joo. Body2hands: Learning to infer 3d hands from conversational gesture body dynamics.IEEE Conf. Comput. Vis. Pattern Recog., pages 11865–11874, 2021
work page 2021
-
[30]
G. Pavlakos, D. Shan, I. Radosavovic, A. Kanazawa, D. Fouhey, and J. Malik. Reconstructing hands in 3D with transformers. InIEEE Conf. Comput. Vis. Pattern Recog., 2024
work page 2024
-
[31]
R. A. Potamias, J. Zhang, J. Deng, and S. Zafeiriou. Wilor: End-to-end 3d hand localization and reconstruction in-the-wild, June 2025
work page 2025
-
[32]
X. Qi, C. Liu, M. Sun, L. Li, C. Fan, and X. Yu. Diverse 3d hand gesture prediction from body dynamics by bilateral hand disentanglement. InIEEE Conf. Comput. Vis. Pattern Recog., pages 4616–4626, June 2023
work page 2023
-
[33]
N. Ravi, V . Gabeur, Y .-T. Hu, R. Hu, C. Ryali, T. Ma, H. Khedr, R. R ¨adle, C. Rolland, L. Gustafson, E. Mintun, J. Pan, K. V . Alwala, N. Carion, C.-Y . Wu, R. Girshick, P. Doll ´ar, and C. Feichtenhofer. Sam 2: Segment anything in images and videos.arXiv preprint arXiv:2408.00714, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
- [34]
-
[35]
F. J. Romero-Ramirez, R. Mu ˜noz-Salinas, and R. Medina- Carnicer. Speeded up detection of squared fiducial markers. Image and Vision Computing, 76:38–47, Aug. 2018
work page 2018
-
[36]
Y . Rong, T. Shiratori, and H. Joo. Frankmocap: A monocular 3d whole-body pose estimation system via regression and integration. InIEEE International Conference on Computer Vision Workshops, 2021
work page 2021
- [37]
- [38]
- [39]
-
[40]
Y . Xu, J. Zhang, Q. Zhang, and D. Tao. ViTPose: Simple vision transformer baselines for human pose estimation. In Adv. Neural Inform. Process. Syst., 2022
work page 2022
-
[41]
Z. Yu, S. Zafeiriou, and T. Birdal. Dyn-hamr: Recovering 4d interacting hand motion from a dynamic camera. InIEEE Conf. Comput. Vis. Pattern Recog., June 2025
work page 2025
-
[42]
Y . Zhou, C. Barnes, J. Lu, J. Yang, and H. Li. On the continuity of rotation representations in neural networks. In 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 5738–5746, 2019
work page 2019
-
[43]
C. Zimmermann, D. Ceylan, J. Yang, B. Russell, M. Argus, and T. Brox. Freihand: A dataset for markerless capture of hand pose and shape from single rgb images. InInt. Conf. Comput. Vis., October 2019
work page 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.