World Machine: Towards Generative World Modeling for Time-Series
Pith reviewed 2026-05-25 05:40 UTC · model grok-4.3
The pith
A transformer with latent states models time series by adapting to varying data amounts and contexts without quadratic scaling costs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
World Machine is a transformer-based architecture with latent states that enables adaptation to different amounts of observed data and contexts. This shows an improvement over traditional transformers, which have a computational and memory cost that scales quadratically with the context. Experiments on a proposed synthetic dataset, Toy1D, validate the approach's feasibility, demonstrate capabilities not found in conventional transformers, and highlight the contributions of each component of the training protocol.
What carries the argument
Latent states inside the transformer architecture that support adaptation across varying observed data quantities and contexts.
If this is right
- The model processes time series whose context length changes during use without incurring quadratic resource growth.
- Capabilities emerge on Toy1D that standard transformers do not exhibit under identical conditions.
- Each element of the described training protocol contributes measurably to the observed performance.
- World models for time series become feasible in a structured, generalizable form.
Where Pith is reading between the lines
- The latent-state approach could transfer to sequence tasks outside time series where context length varies unpredictably.
- Resource savings might allow longer-horizon simulations on hardware that currently limits standard transformers.
- The architecture offers a route to combine world modeling with other generative methods for controllable environment simulation.
Load-bearing premise
The synthetic Toy1D dataset together with the training protocol is enough to prove that the latent-state mechanism creates abilities and efficiency gains missing from ordinary transformers.
What would settle it
Running the same architecture on a non-synthetic time-series dataset and finding no measurable gain in adaptation range or reduction in scaling cost would falsify the central claim.
Figures






read the original abstract
World models represent a paradigm shift in generative AI, pursuing predictive understanding and controllable simulation of environments in a structured and generalizable way. We present World Machine, a generative world-modeling architecture for time series. It is a transformer-based architecture with latent states that enables adaptation to different amounts of observed data and contexts. This shows an improvement over traditional transformers, which have a computational and memory cost that scales quadratically with the context. Experiments on a proposed synthetic dataset, Toy1D, validate the approach's feasibility, demonstrate capabilities not found in conventional transformers, and highlight the contributions of each component of the training protocol.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces World Machine, a transformer-based generative architecture for time-series world modeling that incorporates latent states to adapt to varying amounts of observed data and contexts. It claims this yields capabilities absent from standard transformers while avoiding their quadratic computational and memory scaling with context length. Feasibility, novel capabilities, and component contributions are asserted to be demonstrated via experiments on a new synthetic Toy1D dataset.
Significance. If the experimental claims were substantiated with quantitative comparisons, the work could contribute an efficiency-oriented alternative to context scaling in generative time-series models. However, the absence of reported metrics, baselines, equations, or controlled comparisons leaves the significance unassessable from the current manuscript.
major comments (2)
- [Experiments] Experiments section: the abstract states that Toy1D experiments validate the approach, demonstrate capabilities not found in conventional transformers, and highlight training-protocol contributions, yet supplies no quantitative results, error bars, baselines, architectural equations, or direct comparisons to a standard transformer under the same protocol; this renders the central attribution of advantages to the latent-state mechanism unverifiable.
- [Method] Method section: no equations or architectural diagrams are referenced that would allow reproduction or isolation of the latent-state mechanism's effect on quadratic scaling; without these, the efficiency claim cannot be evaluated against the stated improvement over traditional transformers.
minor comments (1)
- [Abstract] The abstract and introduction should explicitly define the Toy1D dataset generation process and the precise metrics used for validation.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and will revise the manuscript accordingly to improve clarity and verifiability.
read point-by-point responses
-
Referee: [Experiments] Experiments section: the abstract states that Toy1D experiments validate the approach, demonstrate capabilities not found in conventional transformers, and highlight training-protocol contributions, yet supplies no quantitative results, error bars, baselines, architectural equations, or direct comparisons to a standard transformer under the same protocol; this renders the central attribution of advantages to the latent-state mechanism unverifiable.
Authors: We agree that the current manuscript does not provide quantitative results, error bars, baselines, or direct comparisons. In the revised version we will expand the Experiments section to include these elements, reporting metrics with error bars and controlled comparisons against a standard transformer under the same training protocol. revision: yes
-
Referee: [Method] Method section: no equations or architectural diagrams are referenced that would allow reproduction or isolation of the latent-state mechanism's effect on quadratic scaling; without these, the efficiency claim cannot be evaluated against the stated improvement over traditional transformers.
Authors: We acknowledge the absence of explicit equations and diagrams. The revised manuscript will add the missing architectural equations and diagrams to support reproduction and to clarify the claimed effect of the latent-state mechanism on scaling. revision: yes
Circularity Check
No significant circularity detected; claims rest on experimental validation
full rationale
The provided abstract and context describe a transformer-based architecture with latent states for generative world modeling of time series, claiming adaptation to varying data amounts and improved scaling over standard transformers. Validation is attributed to experiments on the synthetic Toy1D dataset demonstrating capabilities and component contributions. No equations, self-referential definitions, fitted parameters presented as predictions, or load-bearing self-citations appear in the text. The derivation chain is not shown to reduce to inputs by construction; the central claims depend on external empirical results rather than internal equivalence or ansatz smuggling. This qualifies as a normal non-finding with self-contained presentation.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
It is a transformer-based architecture with latent states that enables adaptation to different amounts of observed data and contexts... Prediction Shallow: inference of future states, using only one previous encoded state and without sensory data.
-
IndisputableMonolith/Foundation/DimensionForcing.leaneight_tick_period_forces_D3 unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The Core... consists of transformer blocks... state activation using tanh... ALiBias positional encoding
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanLogicNat_induction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
State Discovery process... ws^j = S(ŵs^{j-1})... ws_0 = 0
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Philip J. Ball, Jakob Bauer, Frank Belletti, Bethanie Brown- field, Ariel Ephrat, Shlomi Fruchter, Agrim Gupta, Kris- 8 tian Holsheimer, Aleksander Holynski, Jiri Hron, Christos Kaplanis, Marjorie Limont, Matt McGill, Yanko Oliveira, Jack Parker-Holder, Frank Perbet, Guy Scully, Jeremy Shar, Stephen Spencer, Omer Tov, Ruben Villegas, Emma Wang, Jessica Yu...
-
[2]
World Ma- chine - Data & Report - Toy1D - Experiment 0 Protocol Test
Elton Cardoso do Nascimento and Paula Costa. World Ma- chine - Data & Report - Toy1D - Experiment 0 Protocol Test
-
[3]
World Ma- chine - Data & Report - Toy1D - Experiment 1 Configuration Test
Elton Cardoso do Nascimento and Paula Costa. World Ma- chine - Data & Report - Toy1D - Experiment 1 Configuration Test. 2025
work page 2025
-
[4]
World Ma- chine - Data & Report - Toy1D - Experiment 2 Best Long
Elton Cardoso do Nascimento and Paula Costa. World Ma- chine - Data & Report - Toy1D - Experiment 2 Best Long
-
[5]
Elton Cardoso do Nascimento and Paula Costa. World Ma- chine Docker Image. 2025. 2
work page 2025
-
[6]
World Ma- chine - Toy1D Dataset, 2025
Elton Cardoso do Nascimento and Paula Costa. World Ma- chine - Toy1D Dataset, 2025. 5
work page 2025
-
[7]
Elton Cardoso do Nascimento and Paula Dornhofer Paro Costa. World Machine. Zenodo, 2025. 2
work page 2025
-
[8]
Soft-DTW: A differen- tiable loss function for time-series
Marco Cuturi and Mathieu Blondel. Soft-DTW: A differen- tiable loss function for time-series. InProceedings of the 34th International Conference on Machine Learning - V olume 70, pages 894–903, Sydney, NSW, Australia, 2017. JMLR.org. 5
work page 2017
-
[9]
Oasis: A Universe in a Transformer
Decart, Julian Quevedo, Quinn McIntyre, Spruce Campbell, and Robert Wachen. Oasis: A Universe in a Transformer
-
[10]
Position Information in Transformers: An Overview.Computational Linguistics, 48(3):733–763, 2022
Philipp Dufter, Martin Schmitt, and Hinrich Sch¨utze. Position Information in Transformers: An Overview.Computational Linguistics, 48(3):733–763, 2022. 3
work page 2022
-
[11]
Dream to control: Learning behaviors by latent imagination
Danijar Hafner, Timothy Lillicrap, Jimmy Ba, and Moham- mad Norouzi. Dream to control: Learning behaviors by latent imagination. InInternational Conference on Learning Repre- sentations, 2020. 1, 2
work page 2020
-
[12]
White, Sam Devlin, Cecily Morrison, and Katja Hof- mann
Anssi Kanervisto, Dave Bignell, Linda Yilin Wen, Mar- tin Grayson, Raluca Georgescu, Sergio Valcarcel Macua, Shan Zheng Tan, Tabish Rashid, Tim Pearce, Yuhan Cao, Abdelhak Lemkhenter, Chentian Jiang, Gavin Costello, Gun- shi Gupta, Marko Tot, Shu Ishida, Tarun Gupta, Udit Arora, Ryen W. White, Sam Devlin, Cecily Morrison, and Katja Hof- mann. World and Hu...
work page 2025
-
[13]
A Path Towards Autonomous Machine Intelli- gence Version 0.9.2, 2022-06-27, 2022
Yann LeCun. A Path Towards Autonomous Machine Intelli- gence Version 0.9.2, 2022-06-27, 2022. 1
work page 2022
-
[14]
A Guide for Making Black Box Models Explainable
Christoph Molnar.Interpretable Machine Learning. A Guide for Making Black Box Models Explainable. 3 edition, 2025. 4
work page 2025
-
[15]
Scalable Diffusion Models with Transformers
William Peebles and Saining Xie. Scalable Diffusion Models with Transformers. In2023 IEEE/CVF International Confer- ence on Computer Vision (ICCV), pages 4172–4182, 2023. 3
work page 2023
-
[16]
Train short, test long: Attention with linear biases enables input length extrap- olation
Ofir Press, Noah Smith, and Mike Lewis. Train short, test long: Attention with linear biases enables input length extrap- olation. InInternational Conference on Learning Representa- tions, 2022. 3
work page 2022
-
[17]
Diffusion models are real-time game engines
Dani Valevski, Yaniv Leviathan, Moab Arar, and Shlomi Fruchter. Diffusion models are real-time game engines. In The Thirteenth International Conference on Learning Repre- sentations, 2025. 2
work page 2025
-
[18]
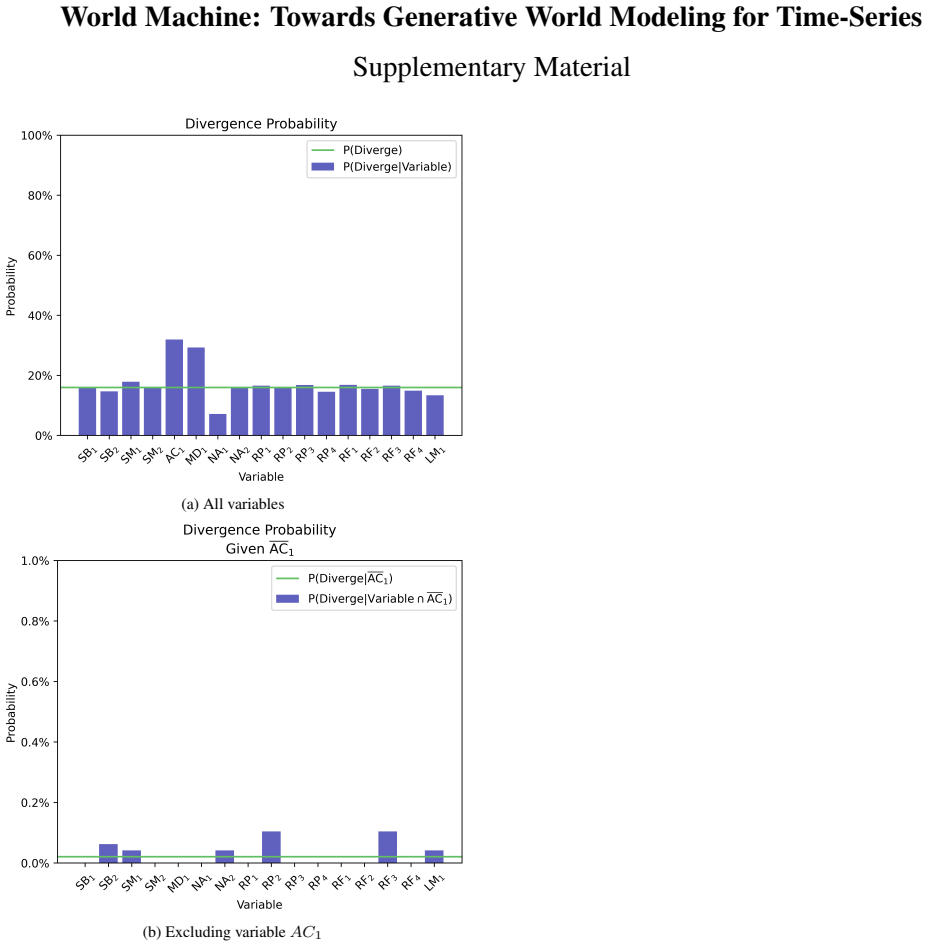
World Labs team. RTFM: A Real-Time Frame Model, 2025. 2 9 World Machine: Towards Generative World Modeling for Time-Series Supplementary Material (a) All variables (b) Excluding variableAC 1 Figure 10. Divergence probability conditioned by training variable Figure 10a shows the divergence probability conditioned by each variable. We can observe a consider...
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.