Adaptive Human-AI Coordination via Hierarchical Action Disentanglement
Pith reviewed 2026-06-30 14:04 UTC · model grok-4.3
The pith
Intrinsic Action Disentanglement uses an intrinsic reward to separate low-level behaviors across high-level skills, enabling adaptive coordination with varied human partners.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
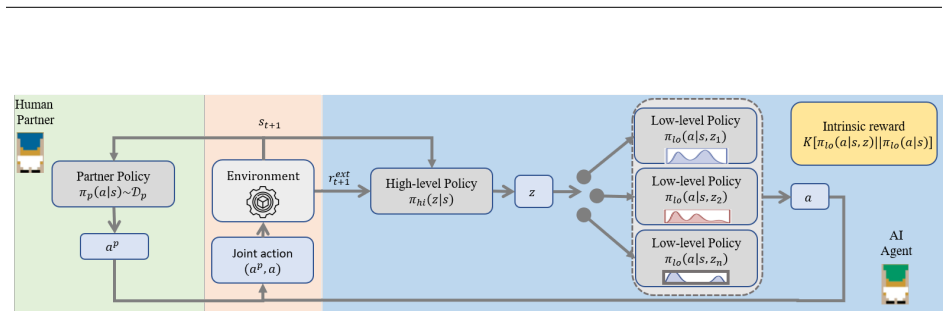
IAD is a deep hierarchical reinforcement learning framework that learns distinct, partner-aware low-level action sequences conditioned on high-level latent skills. It introduces an intrinsic reward that explicitly encourages disentangled action distributions of the agent's low-level policy across skills, yielding an interpretable mapping between high-level decisions and partner-specific behavioral responses. By capturing temporally extended interaction patterns, IAD enables flexible adaptation to heterogeneous partner dynamics under distributional shift and consistently outperforms strong baselines across Overcooked-AI layouts with unseen simulated partners, a human-proxy model, and real hum
What carries the argument
The intrinsic reward added to the low-level policy in the DHRL framework, which encourages disentangled action distributions across high-level skills to produce partner-specific behaviors.
If this is right
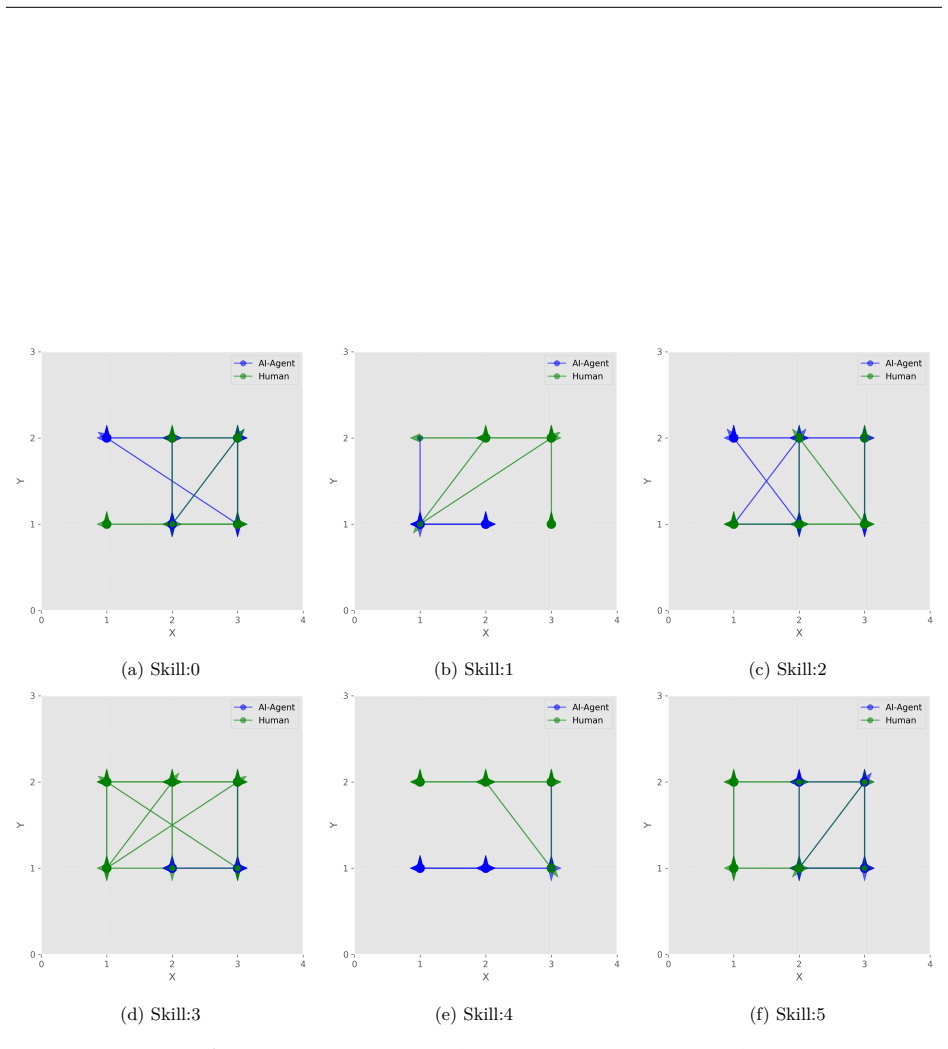
- Agents avoid collapsing to a single behavior and instead maintain distinct responses tied to different high-level skills.
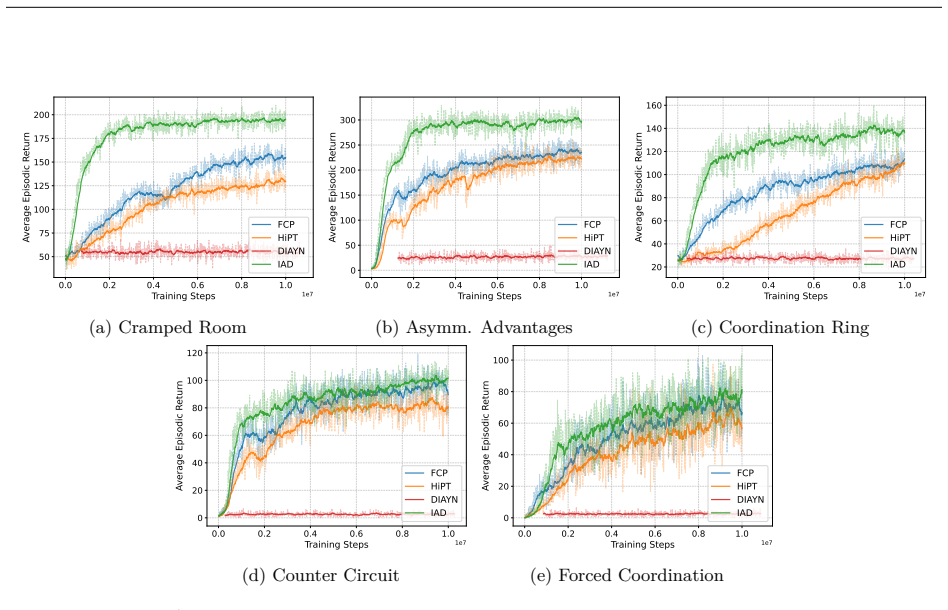
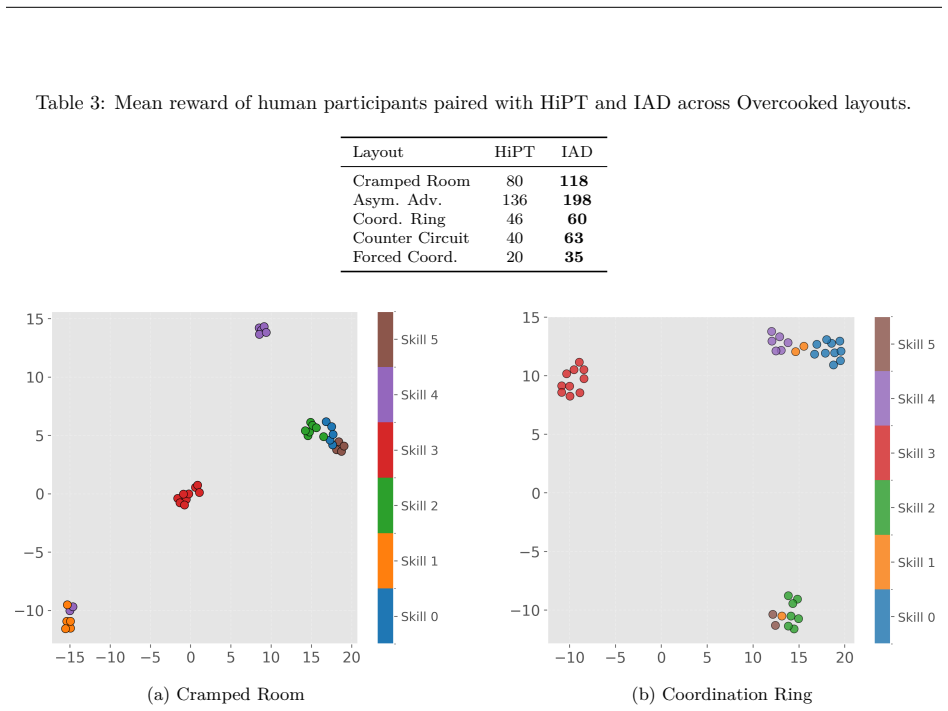
- Coordination improves with both seen and unseen partners, including real humans, across multiple game layouts.
- Temporally extended patterns captured by the hierarchy support adaptation under changes in partner dynamics.
- High-level decisions become interpretable through their mapped low-level behavioral responses.
Where Pith is reading between the lines
- The disentanglement mechanism might transfer to other collaborative domains that require handling varied human inputs without full retraining.
- Explicit separation of action distributions could reduce interference between skills in any hierarchical policy trained with humans.
- Testing the same intrinsic reward in online, non-stationary human interactions would reveal whether the offline Overcooked gains hold during live play.
Load-bearing premise
The intrinsic reward will reliably create disentangled low-level action distributions and improve adaptation without causing training instability or harming overall task performance.
What would settle it
An ablation experiment in Overcooked-AI that removes the intrinsic reward, retrains the agent, and measures no gain in coordination success rate or disentanglement metric (such as mutual information between skills and action sequences) with real human partners would falsify the claim.
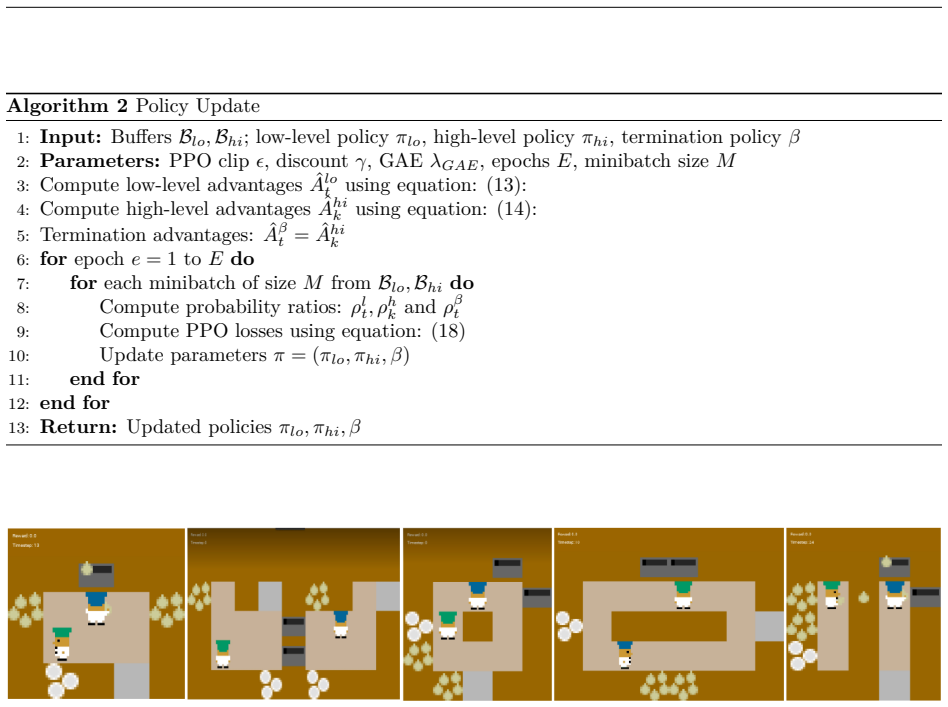
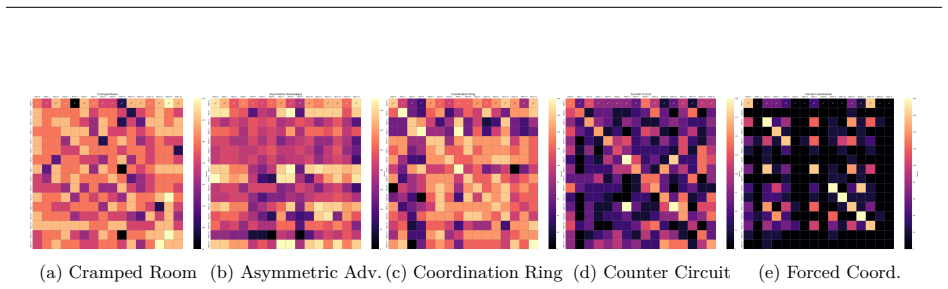
Figures
read the original abstract
Human-AI collaboration requires agents that can adapt to diverse partner behaviors and skill levels while remaining robust to unseen partners. Existing methods often collapse to a single dominant behavior or learn poorly aligned skills, limiting effective coordination. We propose Intrinsic Action Disentanglement (IAD), a deep hierarchical reinforcement learning (DHRL) framework that learns distinct, partner-aware low-level action sequences conditioned on high-level latent skills. IAD introduces an intrinsic reward that explicitly encourages disentangled action distributions of the agent's low-level policy across skills, yielding an interpretable mapping between high-level decisions and partner-specific behavioral responses. By capturing temporally extended interaction patterns, IAD enables flexible adaptation to heterogeneous partner dynamics under distributional shift. We evaluate IAD in the Overcooked-AI domain across multiple layouts and diverse partner settings, including unseen simulated partners, a human-proxy model trained on human-human gameplay, and real human partners. Results show that IAD consistently outperforms strong baselines and achieves more reliable, adaptive coordination across all settings.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Intrinsic Action Disentanglement (IAD), a deep hierarchical reinforcement learning framework for adaptive human-AI coordination. It introduces an intrinsic reward to encourage disentangled action distributions in the low-level policy across high-level latent skills, claiming this yields an interpretable high-level to partner-specific behavior mapping, enables robust adaptation under distributional shift, and produces consistent outperformance over strong baselines in Overcooked-AI across simulated partners, a human-proxy model, and real human partners.
Significance. If the empirical claims hold with proper controls and ablations, the work could advance methods for learning partner-aware hierarchical policies that support flexible coordination with heterogeneous humans. The focus on real-human evaluation and explicit disentanglement via intrinsic rewards would be a concrete contribution if the mechanism is shown to be stable and non-circular.
major comments (2)
- [Abstract and §3] Abstract and §3 (Methods): The intrinsic reward is the load-bearing mechanism asserted to produce disentangled low-level policies, interpretable mappings, and outperformance, yet no equation, weighting factor, regularization term, or interaction with the task reward in the DHRL objective is supplied; without this formulation it is impossible to evaluate whether the reward reliably achieves disentanglement or introduces instability/performance trade-offs.
- [Abstract and Results] Abstract and Results section: The abstract asserts 'consistent outperformance' and 'more reliable, adaptive coordination' across all settings including real humans, but supplies no quantitative results, error bars, statistical tests, baseline details, or controls; the central claims cannot be assessed without these.
minor comments (1)
- [Notation] Clarify notation for 'partner-aware low-level action sequences' and how the high-level latent skills are sampled or conditioned during execution.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive comments. We address each major point below and commit to revisions that strengthen the manuscript's clarity and completeness.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3 (Methods): The intrinsic reward is the load-bearing mechanism asserted to produce disentangled low-level policies, interpretable mappings, and outperformance, yet no equation, weighting factor, regularization term, or interaction with the task reward in the DHRL objective is supplied; without this formulation it is impossible to evaluate whether the reward reliably achieves disentanglement or introduces instability/performance trade-offs.
Authors: We agree that the absence of an explicit formulation for the intrinsic reward limits evaluability. In the revised manuscript we will add the full mathematical definition of the intrinsic reward (including its weighting factor relative to the task reward), any regularization terms, and its precise integration into the DHRL objective function within Section 3. This addition will allow readers to assess stability and disentanglement properties directly. revision: yes
-
Referee: [Abstract and Results] Abstract and Results section: The abstract asserts 'consistent outperformance' and 'more reliable, adaptive coordination' across all settings including real humans, but supplies no quantitative results, error bars, statistical tests, baseline details, or controls; the central claims cannot be assessed without these.
Authors: We acknowledge the concern. The current results section contains performance tables and figures with error bars and baseline comparisons, yet we agree these elements require clearer presentation and additional statistical tests for full transparency. In revision we will expand the results section with explicit quantitative values, p-values or confidence intervals, and further controls, and we will update the abstract to reference key quantitative outcomes where space permits. revision: yes
Circularity Check
No circularity: intrinsic reward presented as independent design choice with no reduction to fitted outcomes or self-citations.
full rationale
The provided abstract and description introduce IAD as a DHRL framework whose central mechanism—an intrinsic reward encouraging disentangled low-level action distributions—is stated as an explicit design decision rather than a quantity derived from or fitted to the reported performance metrics. No equations, self-citations, uniqueness theorems, or renamings appear in the given material that would reduce the claimed mapping or outperformance to the inputs by construction. The derivation chain therefore remains self-contained against external benchmarks, consistent with the reader's assessment of score 1.0.
Axiom & Free-Parameter Ledger
free parameters (1)
- intrinsic reward weight
invented entities (1)
-
Intrinsic reward for action disentanglement
no independent evidence
Reference graph
Works this paper leans on
-
[1]
High-Dimensional Continuous Control Using Generalized Advantage Estimation
doi: 10.1162/neco.1997.9.8.1735. Hengyuan Hu, Adam Lerer, Alex Peysakhovich, and Jakob Foerster. “other-play” for zero-shot coordination. InInternational Conference on Machine Learning, pp. 4399–4410. PMLR, 2020. Gary Klein, David D. Woods, Jeffrey M. Bradshaw, Robert R. Hoffman, and Paul J. Feltovich. Ten challenges for making automation a "team player" ...
work page internal anchor Pith review Pith/arXiv arXiv doi:10.1162/neco.1997.9.8.1735 1997
-
[2]
Sutton, Doina Precup, and Satinder Singh
doi: https://doi.org/10.1016/S0004-3702(99)00052-1. URLhttps://www.sciencedirect.com/ science/article/pii/S0004370299000521. Alexander Sasha Vezhnevets, Simon Osindero, Tom Schaul, Nicolas Heess, Max Jaderberg, David Silver, and Koray Kavukcuoglu. Feudal networks for hierarchical reinforcement learning. InInternational conference on machine learning, pp. ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.