Physics-Guided Deep Unfolding for Blind Cross-Sensor Spectral Super-Resolution via Learning the Spectral Transformation Function
Pith reviewed 2026-06-28 02:53 UTC · model grok-4.3
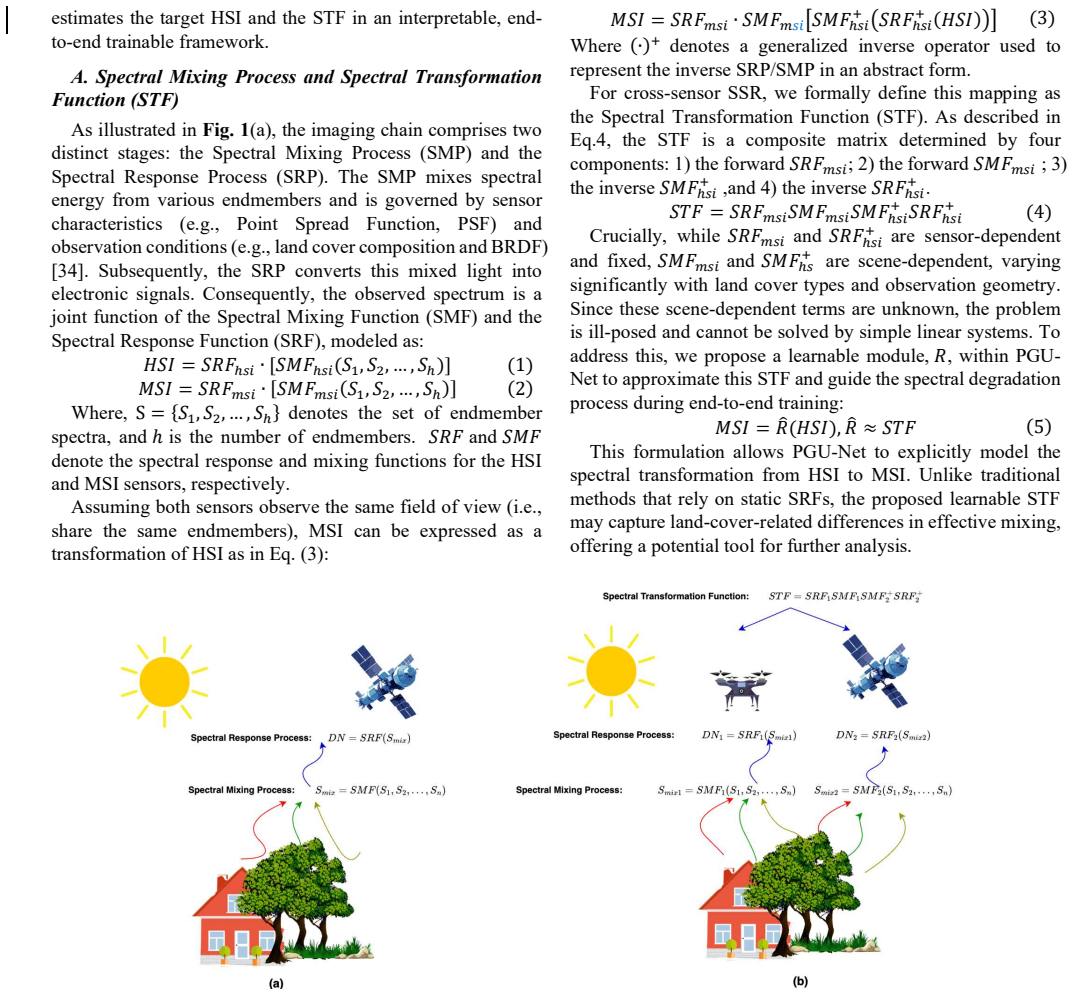
The pith
A deep unfolding network jointly recovers the hyperspectral image and the unknown spectral transformation function from multispectral inputs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
PGU-Net unrolls an alternating optimization procedure into an end-to-end trainable architecture with stages, where each stage sequentially updates the HSI and the STF. Both modules combine learnable proximal networks with differentiable closed-form solvers, enabling physical interpretability while retaining strong representation capacity.
What carries the argument
PGU-Net, an unrolled alternating-optimization network that updates the hyperspectral image and the spectral transformation function in successive stages using proximal networks and closed-form solvers.
If this is right
- The network produces both an improved HSI reconstruction and an explicit estimate of the unknown STF on datasets with multiple SRFs.
- Performance holds under truly blind conditions on real cross-sensor UAV imagery without any ground-truth STF.
- The estimated STF can capture land-cover-related spectral differences across scenes.
- The method removes the need for sensor-specific calibration data that limits single-sensor SSR approaches.
Where Pith is reading between the lines
- The same unrolling pattern could be applied to other blind imaging problems where the forward operator must be learned jointly with the signal.
- Varying the number of stages at inference time might trade accuracy for speed without retraining.
- The land-cover dependence noted in the STF estimate invites targeted experiments on homogeneous versus mixed scenes.
Load-bearing premise
The spectral degradation from HSI to MSI can be jointly estimated with the HSI itself through a fixed number of unrolled alternating optimization stages that combine learnable proximal networks with differentiable closed-form solvers.
What would settle it
On benchmark datasets supplied with known spectral response functions, the recovered STF deviates substantially from ground truth or the HSI reconstruction quality fails to exceed prior methods that assume a fixed known SRF.
Figures



read the original abstract
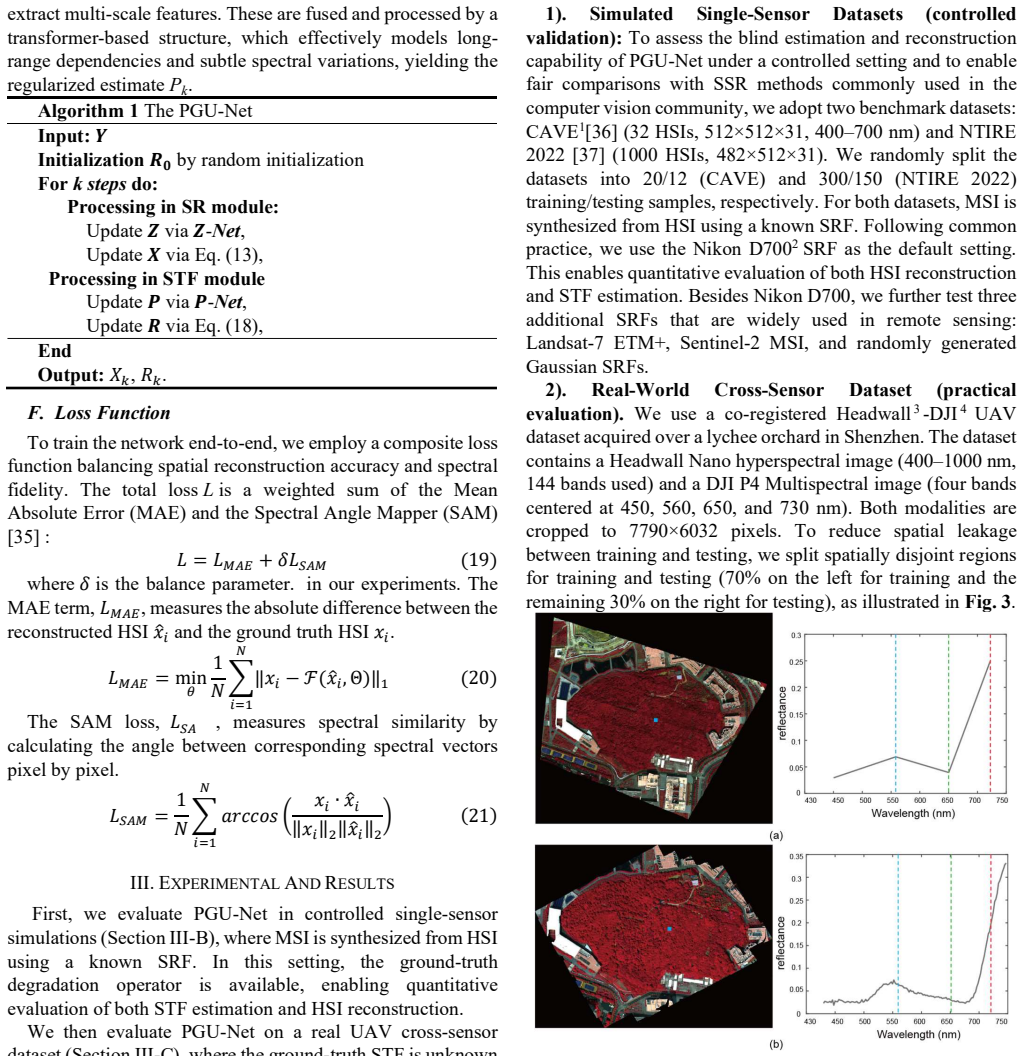
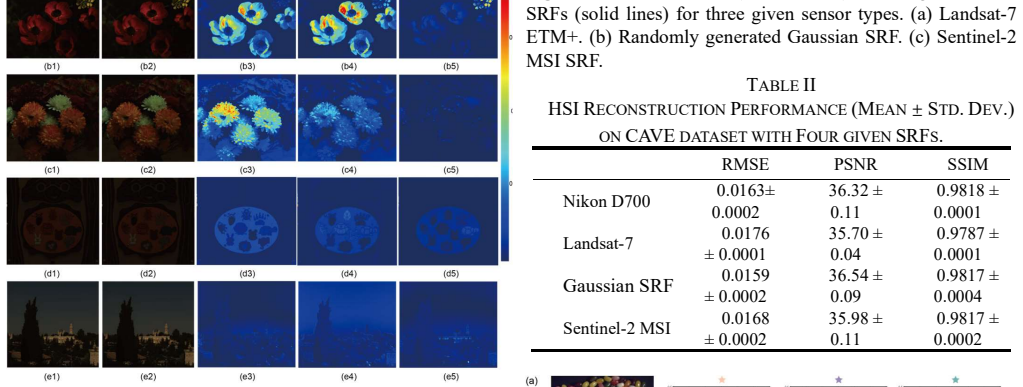
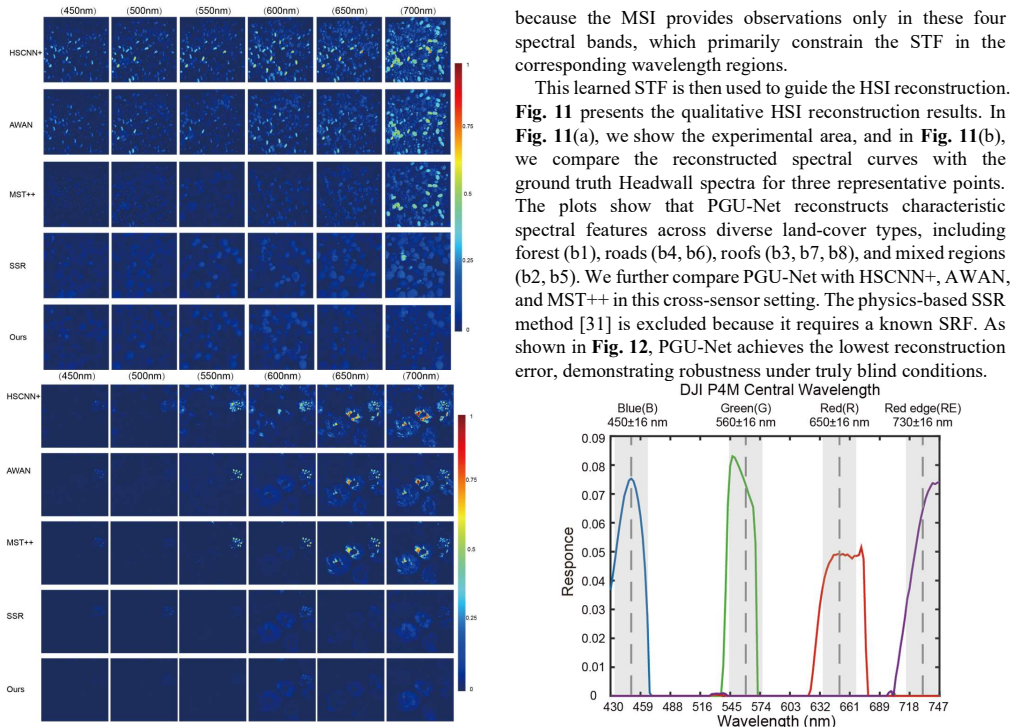
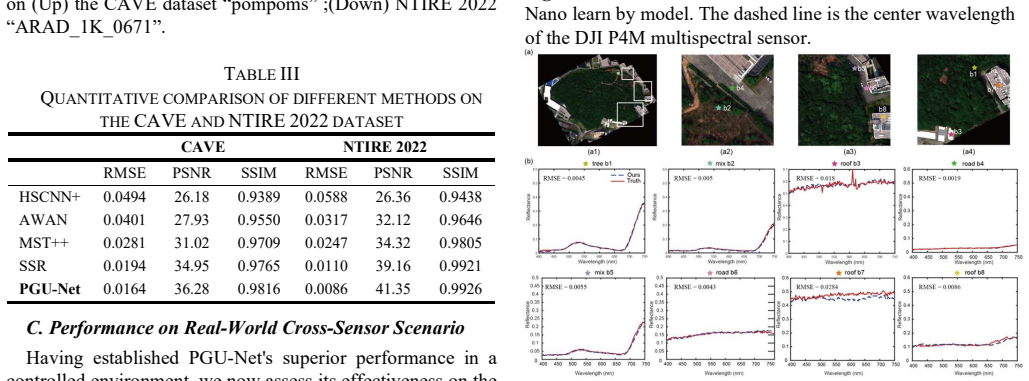
Hyperspectral imaging provides rich spectral information for quantitative remote sensing, yet hyperspectral sensors remain costly and thus unavailable in many UAV deployments. Spectral super-resolution (SSR) seeks to reconstruct hyperspectral images (HSIs) from multispectral images (MSIs). Most existing SSR methods assume a fixed and known spectral response function (SRF) and are therefore limited to single-sensor settings. In practical cross-sensor scenarios, the spectral degradation from HSI to MSI is unknown and varies with sensor characteristics and scene content, which renders HSI reconstruction ill-posed. This paper proposes a physics-guided deep unfolding network, termed PGU-Net, to address blind cross-sensor SSR by jointly estimating the HSI and a learnable spectral transformation function (STF). PGU-Net unrolls an alternating optimization procedure into an end-to-end trainable architecture with stages, where each stage sequentially updates the HSI and the STF. Both modules combine learnable proximal networks with differentiable closed-form solvers, enabling physical interpretability while retaining strong representation capacity. Experiments on benchmark datasets (CAVE and NTIRE 2022) with multiple SRFs demonstrate accurate recovery of the STF (degradation operator) and improved reconstruction performance over state-of-the-art SSR methods. Furthermore, evaluations on a real UAV cross-sensor dataset (Headwall Nano HSI and DJI P4 Multispectral MSI) verify the effectiveness and robustness of PGU-Net under truly blind conditions, and suggest that the estimated STF may exhibit land-cover-related differences.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes PGU-Net, a physics-guided deep unfolding network for blind cross-sensor spectral super-resolution (SSR). It jointly estimates the hyperspectral image (HSI) and a learnable spectral transformation function (STF) by unrolling an alternating optimization procedure into an end-to-end trainable architecture. Each stage combines learnable proximal networks with differentiable closed-form solvers. Experiments on CAVE and NTIRE 2022 benchmarks with multiple SRFs, plus a real UAV cross-sensor dataset (Headwall Nano HSI and DJI P4 Multispectral MSI), are claimed to demonstrate accurate STF recovery and improved reconstruction over state-of-the-art SSR methods under blind conditions.
Significance. If the central claims hold, the work would address a practical gap in UAV-based hyperspectral imaging by enabling blind cross-sensor SSR without known SRFs. The physics-guided unfolding with closed-form solvers offers interpretability advantages over purely data-driven methods, and the joint STF/HSI estimation is a notable technical contribution for handling unknown degradation operators.
major comments (2)
- [Method description (alternating optimization unrolling)] The central assumption that fixed-stage unrolled alternating optimization (learnable proximal nets + differentiable closed-form solvers) can recover the true STF from MSI observations alone, without ground-truth STF or additional regularization on the STF, is load-bearing but insufficiently justified. Multiple (HSI, STF) pairs can produce identical MSI observations, raising identifiability risks that could lead the proximal networks to fit training-sensor artifacts rather than the underlying degradation; this directly impacts the claim of accurate STF recovery on the real UAV dataset where land-cover variation is noted as potentially affecting the estimated STF.
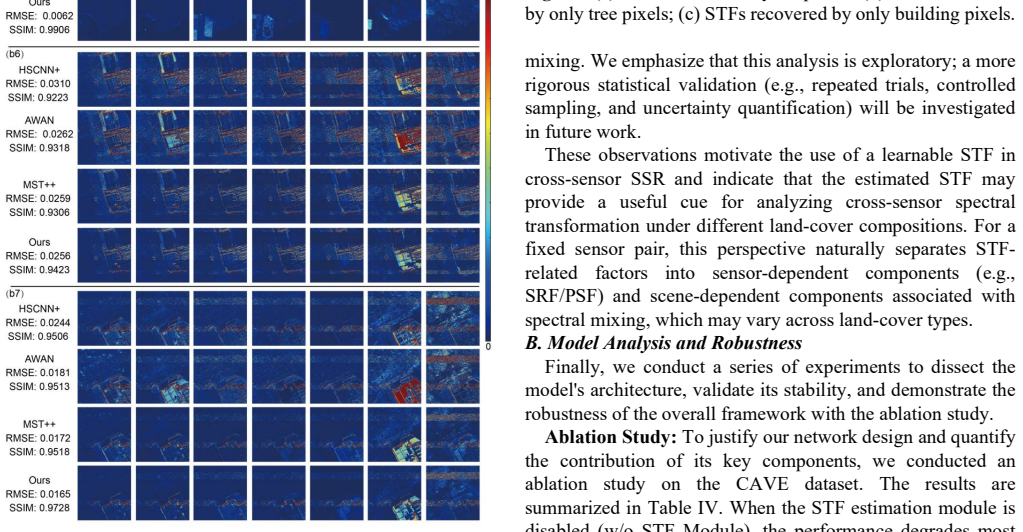
- [Experiments section] The experimental claims of 'accurate recovery of the STF' and 'improved reconstruction performance' on CAVE, NTIRE 2022, and the UAV dataset lack visible quantitative metrics, ablation studies, error bars, or full protocol details in the reported results, undermining verification of the central claims.
minor comments (1)
- Clarify the distinction (if any) between STF and SRF terminology throughout the manuscript.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below and describe the revisions planned for the next version of the manuscript.
read point-by-point responses
-
Referee: [Method description (alternating optimization unrolling)] The central assumption that fixed-stage unrolled alternating optimization (learnable proximal nets + differentiable closed-form solvers) can recover the true STF from MSI observations alone, without ground-truth STF or additional regularization on the STF, is load-bearing but insufficiently justified. Multiple (HSI, STF) pairs can produce identical MSI observations, raising identifiability risks that could lead the proximal networks to fit training-sensor artifacts rather than the underlying degradation; this directly impacts the claim of accurate STF recovery on the real UAV dataset where land-cover variation is noted as potentially affecting the estimated STF.
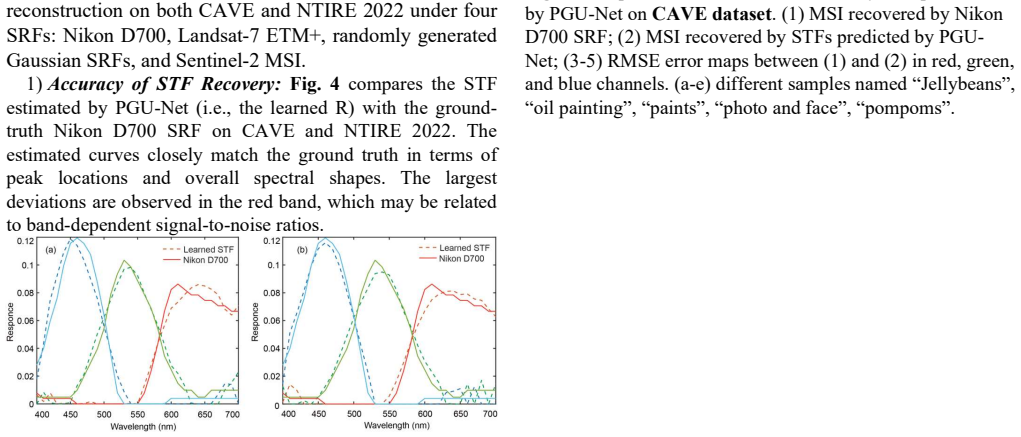
Authors: We acknowledge the identifiability challenge inherent to blind STF estimation. The framework mitigates this through the physics-derived closed-form STF solver within each unfolding stage, which enforces consistency with the spectral degradation model, together with end-to-end training on diverse (HSI, MSI) pairs. On CAVE and NTIRE 2022 we validate recovered STFs against known ground-truth SRFs; on the UAV data the estimated STF yields measurable reconstruction gains even if land-cover effects are present. We will add an explicit discussion of identifiability, the role of the proximal networks as implicit regularizers, and the distinction between exact STF recovery and practical reconstruction utility. revision: partial
-
Referee: [Experiments section] The experimental claims of 'accurate recovery of the STF' and 'improved reconstruction performance' on CAVE, NTIRE 2022, and the UAV dataset lack visible quantitative metrics, ablation studies, error bars, or full protocol details in the reported results, undermining verification of the central claims.
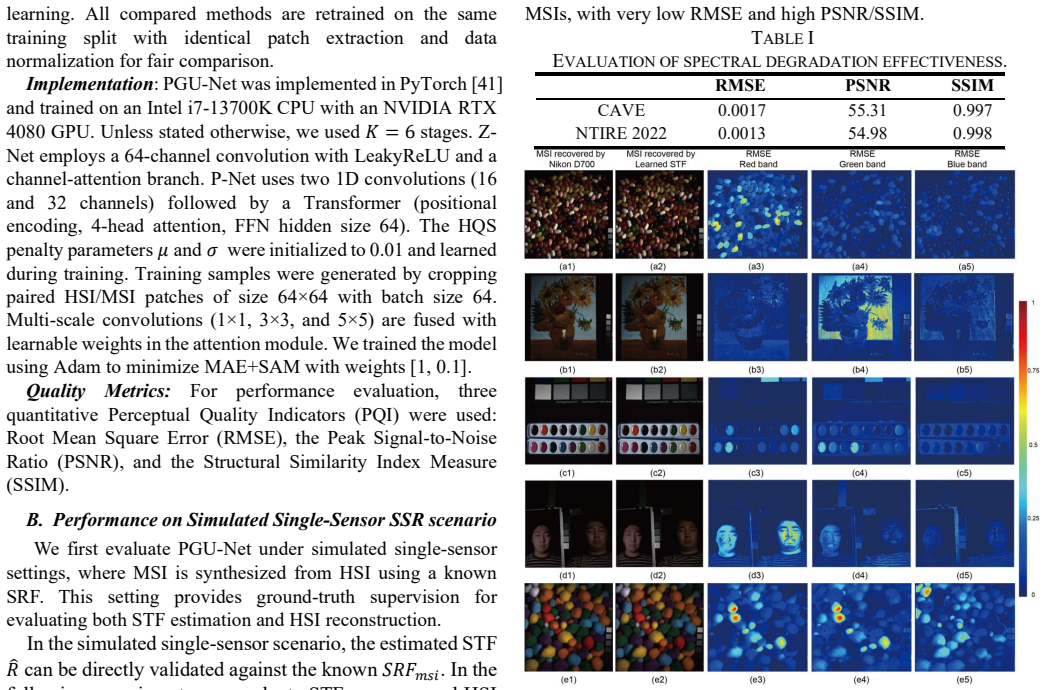
Authors: The full manuscript contains quantitative tables (PSNR/SSIM/SAM for reconstruction and spectral error for STF) on CAVE and NTIRE 2022, plus qualitative UAV results. However, we agree that visibility, ablations, statistical reporting, and protocol details are insufficient. We will revise the experiments section to add: complete metric tables with all baselines, ablation studies on unfolding stages and STF module, error bars from repeated runs, and a detailed experimental protocol subsection covering hyperparameters, data splits, and training procedure. revision: yes
Circularity Check
No circularity; new trainable architecture with independent empirical claims
full rationale
The paper introduces PGU-Net as an end-to-end trainable deep unfolding network that jointly estimates HSI and STF via unrolled alternating optimization stages combining proximal networks and closed-form solvers. No derivation step reduces a claimed prediction or result to a fitted input by construction, nor does any load-bearing premise rely on self-citation chains or imported uniqueness theorems. The STF is explicitly an output of the learned model rather than presupposed, and performance claims rest on benchmark experiments and real UAV data rather than tautological reparameterization. This is a standard architecture proposal whose central content is independent of its own inputs.
Axiom & Free-Parameter Ledger
free parameters (1)
- Parameters of the learnable proximal networks
axioms (1)
- domain assumption The alternating optimization procedure for HSI and STF estimation can be unrolled into a fixed number of differentiable stages.
Reference graph
Works this paper leans on
-
[1]
We formulate blind cross-sensor SSR as a joint estimation problem of the HSI X and an explicit spectral transformation matrix R (STF) that models the unknown cross-sensor spectral degradation
-
[2]
We develop PGU-Net, a physics-guided deep unfolding framework that unrolls an alternating optimization algorithm into a multi-stage network, integrating learnable proximal operators with differentiable closed-form solvers for both X and R
-
[3]
The remainder of this paper is organized as follows
Extensive experiments on simulated and real cross-sensor data validate that PGU-Net improves reconstruction accuracy while yielding physically meaningful STF estimates; additional analyses indicate that the estimated STF exhibits consistent variations correlated with land-cover categories. The remainder of this paper is organized as follows. Section II pr...
-
[4]
Z-Net: The architecture employs a dual-branch design. The upper branch utilizes standard convolutions for global feature extraction, while the lower branch incorporates Channel Attention (CA) mechanisms to emphasize local spectral features. Features are fused via concatenation and refined through attention-enhanced convolutional layers to produce the regu...
-
[5]
P-Net: Taking the current estimate Rk as input, P-Net utilizes a multi-branch architecture with varying kernel sizes to extract multi-scale features. These are fused and processed by a transformer-based structure, which effectively models long-range dependencies and subtle spectral variations, yielding the regularized estimate Pk. Algorithm 1 The PGU-Net ...
-
[6]
Mask-guided Spectral-wise Transformer for Efficient Hyperspectral Image Reconstruction,
Y. Cai et al., “Mask-guided Spectral-wise Transformer for Efficient Hyperspectral Image Reconstruction,” Mar. 21, 2022, arXiv: arXiv:2111.07910. doi: 10.48550/arXiv.2111.07910
-
[7]
ISPDiff: Interpretable Scale- Propelled Diffusion Model for Hyperspectral Image Super-Resolution,
W. Dong, S. Liu, S. Xiao, J. Qu, and Y. Li, “ISPDiff: Interpretable Scale- Propelled Diffusion Model for Hyperspectral Image Super-Resolution,” Ieee T Geosci Remote, vol. 62, pp. 1–14, 2024, doi: 10.1109/TGRS.2024.3407967
-
[8]
EDiffSR: An Efficient Diffusion Probabilistic Model for Remote Sensing Image Super- Resolution,
Y. Xiao, Q. Yuan, K. Jiang, J. He, X. Jin, and L. Zhang, “EDiffSR: An Efficient Diffusion Probabilistic Model for Remote Sensing Image Super- Resolution,” Ieee T Geosci Remote, vol. 62, pp. 1–14, 2024, doi: 10.1109/TGRS.2023.3341437
-
[9]
H. Shen, M. Jiang, J. Li, C. Zhou, Q. Yuan, and L. Zhang, “Coupling model- and data-driven methods for remote sensing image restoration and fusion: Improving physical interpretability,” IEEE Geoscience and Remote Sensing Magazine, vol. 10, no. 2, pp. 231–249, June 2022, doi: 10.1109/MGRS.2021.3135954
-
[10]
Spectral Response Function-Guided Deep Optimization-Driven Network for Spectral Super- Resolution,
J. He, J. Li, Q. Yuan, H. Shen, and L. Zhang, “Spectral Response Function-Guided Deep Optimization-Driven Network for Spectral Super- Resolution,” Ieee T Neur Net Lear, vol. 33, no. 9, pp. 4213–4227, Sept. 2022, doi: 10.1109/TNNLS.2021.3056181
-
[11]
Spectral Super-Resolution via Model-Guided Cross-Fusion Network,
R. Dian, T. Shan, W. He, and H. Liu, “Spectral Super-Resolution via Model-Guided Cross-Fusion Network,” Ieee T Neur Net Lear, pp. 1–12, 2023, doi: 10.1109/TNNLS.2023.3238506
-
[12]
Filter Selection for Hyperspectral Estimation,
B. Arad and O. Ben-Shahar, “Filter Selection for Hyperspectral Estimation,” in 2017 IEEE International Conference on Computer Vision (ICCV), Oct. 2017, pp. 3172–3180. doi: 10.1109/ICCV.2017.342
-
[13]
Joint Camera Spectral Response Selection and Hyperspectral Image Recovery,
Y. Fu, T. Zhang, Y. Zheng, D. Zhang, and H. Huang, “Joint Camera Spectral Response Selection and Hyperspectral Image Recovery,” Ieee T Pattern Anal, vol. 44, no. 1, pp. 256–272, Jan. 2022, doi: 10.1109/TPAMI.2020.3009999
-
[14]
Efficient transfer learning for spectral image reconstruction from RGB images,
E. Martínez, S. Castro, J. Bacca, and H. Arguello, “Efficient transfer learning for spectral image reconstruction from RGB images,” in 2020 IEEE Colombian Conference on Applications of Computational Intelligence (IEEE ColCACI 2020), Aug. 2020, pp. 1–6. doi: 10.1109/ColCACI50549.2020.9247895
-
[15]
Progressive Spatial–Spectral Joint Network for Hyperspectral Image Reconstruction,
T. Li and Y. Gu, “Progressive Spatial–Spectral Joint Network for Hyperspectral Image Reconstruction,” IEEE Transactions on Geoscience and Remote Sensing, vol. 60, pp. 1–14, 2022, doi: 10.1109/TGRS.2021.3079969
-
[16]
Z. Zhen, S. Chen, T. Yin, and J.-P. Gastellu-Etchegorry, “Globally quantitative analysis of the impact of atmosphere and spectral response function on 2-band enhanced vegetation index (EVI2) over sentinel-2 and landsat-8,” ISPRS Journal of Photogrammetry and Remote Sensing, vol. 205, pp. 206–226, Nov. 2023, doi: 10.1016/j.isprsjprs.2023.09.024
-
[17]
Blind Spectral Super- Resolution by Estimating Spectral Degradation Between Unpaired Images,
J. Xie, L. Fang, C. Wu, F. Xie, and J. Chanussot, “Blind Spectral Super- Resolution by Estimating Spectral Degradation Between Unpaired Images,” IEEE Transactions on Geoscience and Remote Sensing, vol. 62, pp. 1–14, 2024, doi: 10.1109/TGRS.2024.3387857
-
[18]
Advancing image super-resolution techniques in remote sensing: A comprehensive survey,
Y. Qi, M. Lou, Y. Liu, L. Li, Z. Yang, and W. Nie, “Advancing image super-resolution techniques in remote sensing: A comprehensive survey,” ISPRS Journal of Photogrammetry and Remote Sensing, vol. 231, pp. 68– 100, Jan. 2026, doi: 10.1016/j.isprsjprs.2025.10.024
-
[19]
L. Liu, W. Li, Z. Shi, and Z. Zou, “Physics-informed hyperspectral remote sensing image synthesis with deep conditional generative adversarial networks,” IEEE Transactions on Geoscience and Remote Sensing, vol. 60, pp. 1–15, 2022, doi: 10.1109/TGRS.2022.3173532
-
[20]
Single Hyperspectral Image Super-Resolution with Grouped Deep Recursive Residual Network,
Y. Li, L. Zhang, C. Dingl, W. Wei, and Y. Zhang, “Single Hyperspectral Image Super-Resolution with Grouped Deep Recursive Residual Network,” in 2018 IEEE Fourth International Conference on Multimedia Big Data (BigMM) , Sept. 2018, pp. 1–4. doi: 10.1109/BigMM.2018.8499097
-
[21]
Generalized Assorted Pixel Camera: Postcapture Control of Resolution, Dynamic Range, and Spectrum,
F. Yasuma, T. Mitsunaga, D. Iso, and S. K. Nayar, “Generalized Assorted Pixel Camera: Postcapture Control of Resolution, Dynamic Range, and Spectrum,” IEEE Trans. on Image Process., vol. 19, no. 9, pp. 2241–2253, Sept. 2010, doi: 10.1109/TIP.2010.2046811
-
[22]
Roadsaw: A large-scale dataset for camera- based road surface and wetness estimation,
B. Arad et al., “NTIRE 2022 spectral recovery challenge and data set,” in 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), June 2022, pp. 862–880. doi: 10.1109/CVPRW56347.2022.00102
-
[23]
HSCNN+: Advanced CNN-Based Hyperspectral Recovery from RGB Images,
Z. Shi, C. Chen, Z. Xiong, D. Liu, and F. Wu, “HSCNN+: Advanced CNN-Based Hyperspectral Recovery from RGB Images,” in 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), June 2018, pp. 1052–10528. doi: 10.1109/CVPRW.2018.00139
-
[24]
Frerix, T., Niesner, M., and Cremers, D
J. Li, C. Wu, R. Song, Y. Li, and F. Liu, “Adaptive Weighted Attention Network with Camera Spectral Sensitivity Prior for Spectral Reconstruction from RGB Images,” in 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), June 2020, pp. 1894–1903. doi: 10.1109/CVPRW50498.2020.00239
-
[25]
Roadsaw: A large-scale dataset for camera- based road surface and wetness estimation,
Y. Cai et al., “MST++: Multi-stage Spectral-wise Transformer for Efficient Spectral Reconstruction,” in 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), June 2022, pp. 744–754. doi: 10.1109/CVPRW56347.2022.00090
-
[26]
N. Ketkar, “Introduction to PyTorch,” in Deep Learning with Python: A Hands-on Introduction, N. Ketkar, Ed., Berkeley, CA: Apress, 2017, pp. 195–208. doi: 10.1007/978-1-4842-2766-4_12
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.