Multi-Robot Planning and Control from CCTV Camera Networks in a Real Warehouse
Pith reviewed 2026-06-28 00:41 UTC · model grok-4.3
The pith
External CCTV networks can coordinate multiple warehouse robots using only off-board compute and image-space planning over an uncalibrated camera graph.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
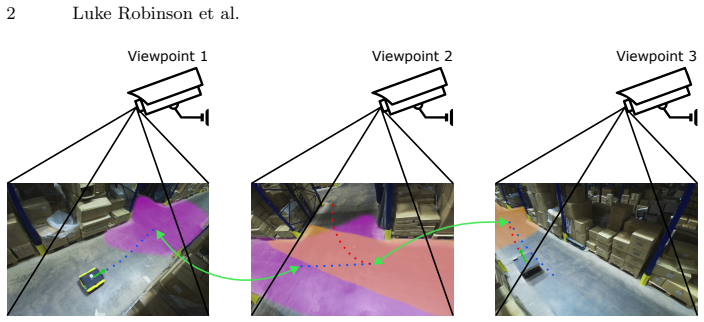
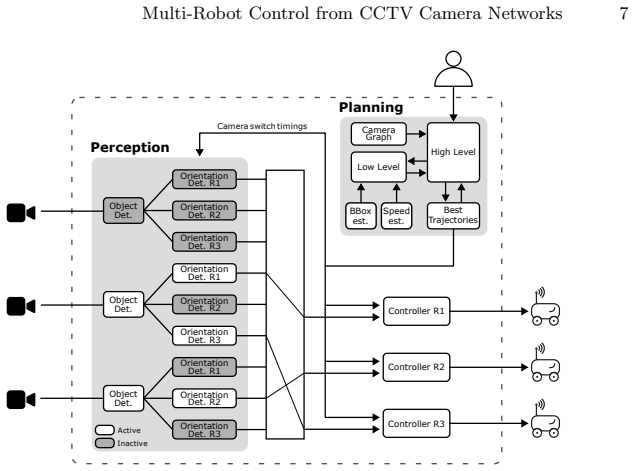
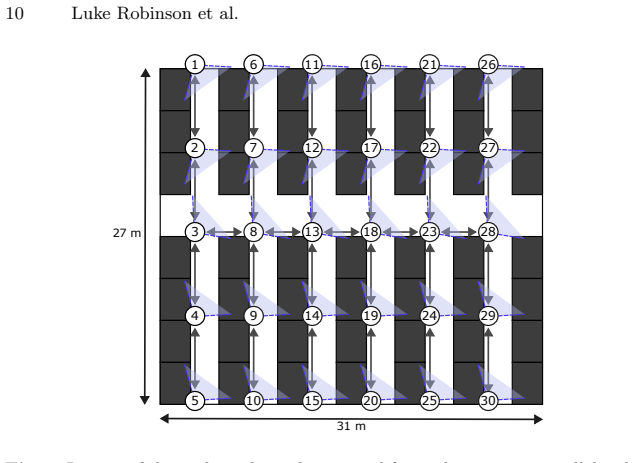
A hierarchical planner selects a camera sequence per robot and plans its image-space motion through each view, coordinating the fleet with a prioritised-then-joint strategy that treats overlapping camera regions as shared resources held by one robot at a time to prevent collisions and deadlocks. The system runs entirely over an uncalibrated pixel-wise topological camera graph and was validated in a real warehouse with four robots and 30 cameras across six 27 m aisles.
What carries the argument
The hierarchical planner that selects camera sequences per robot and plans image-space motion through each view, coordinated with a prioritised-then-joint strategy treating overlapping camera regions as shared resources.
If this is right
- Robots can complete warehouse missions without carrying any task-specific navigation hardware.
- Wide-area multi-robot operation becomes possible with flexible, uncalibrated camera placement.
- Coordination statistics and mission times can be achieved by treating camera overlaps as exclusive shared resources.
- Sensing and compute can be moved entirely off the robots while still preventing collisions and deadlocks.
Where Pith is reading between the lines
- Centralising all perception and planning could lower per-robot hardware costs in structured indoor settings.
- The same image-space approach might extend to other fixed-camera environments such as factories or loading bays.
- Removing the need for onboard sensors could simplify robot maintenance and allow cheaper, simpler platforms.
- The uncalibrated graph suggests the method tolerates occasional camera movement or addition without full recalibration.
Load-bearing premise
The uncalibrated pixel-wise topological camera graph supplies enough connectivity and overlap for the prioritised-then-joint strategy to prevent collisions and deadlocks across the full warehouse layout.
What would settle it
A warehouse test in which two robots simultaneously occupy an overlapping camera region or reach a deadlock while following the generated plans would show the claim does not hold.
Figures
read the original abstract
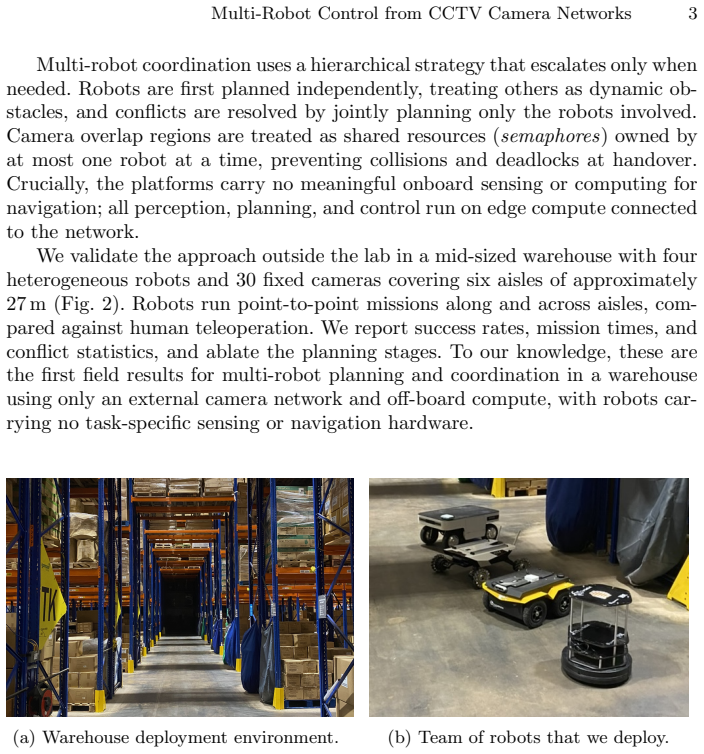
Off-board control of mobile robots from cameras embedded in the environment offers a practical path to scalable autonomy, moving sensing and compute off the robots. We extend this idea from the single-robot case to coordinated fleets in a real warehouse, driving multiple robots with only a distributed CCTV network and edge compute. The system operates entirely in image space over an uncalibrated, pixel-wise topological camera graph, enabling wide-area operation with flexible camera placement. A hierarchical planner selects a camera sequence per robot and plans its image-space motion through each view, coordinating robots with a prioritised-then-joint strategy and treating overlapping camera regions as shared resources held by one robot at a time to prevent collisions and deadlocks. We validate the approach in a real warehouse with four robots and 30 cameras across six 27 m aisles, reporting mission times and coordination statistics. To our knowledge, this is the first field demonstration of multi-robot planning and coordination using only an external camera network and off-board compute, with robots carrying no task-specific navigation hardware.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to be the first field demonstration of multi-robot planning and coordination using only an external camera network and off-board compute in a real warehouse. The system uses an uncalibrated pixel-wise topological camera graph for image-space planning and a prioritised-then-joint strategy to coordinate four robots with 30 cameras across six aisles, treating overlaps as shared resources to prevent collisions.
Significance. If the result holds, it has high practical significance for robotics applications in warehouses, as it allows using existing CCTV infrastructure for robot control without onboard navigation hardware. This could lower costs and increase flexibility. The field test provides valuable real-world data on mission times and coordination, supporting the feasibility of the approach. The absence of free parameters and the focus on implemented system are strengths.
minor comments (1)
- [Abstract] The abstract mentions reporting mission times and coordination statistics but does not present any specific numbers, failure rates, or baseline comparisons, which would help readers assess the results more readily.
Simulated Author's Rebuttal
We thank the referee for the positive summary, recognition of the work's practical significance for warehouse robotics, and recommendation of minor revision. The referee's description of the system and contributions is accurate. No major comments were provided in the report.
Circularity Check
No significant circularity; systems paper with no derivation chain
full rationale
The paper describes an implemented multi-robot coordination system using an external uncalibrated camera network, with validation via field tests in a warehouse. No equations, fitted parameters, predictions, or first-principles derivations are present in the provided text. The central claim is an empirical demonstration rather than a mathematical result that could reduce to its inputs by construction. No load-bearing steps match any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption A pixel-wise topological camera graph enables planning and coordination without metric calibration or 3D reconstruction.
Reference graph
Works this paper leans on
-
[1]
AAAI35(13), 11,220–11,227 (2021)
Andreychuk, A., Yakovlev, K., Boyarski, E., Stern, R.: Improving continuous-time conflict based search. AAAI35(13), 11,220–11,227 (2021)
2021
-
[2]
In: ICRA, vol
Batalin, M.A., Sukhatme, G.S., Hattig, M.: Mobile robot navigation using a sensor network. In: ICRA, vol. 1, pp. 636–641. IEEE (2004)
2004
-
[3]
In: IJCAI, pp
Boyarski, E., Felner, A., Stern, R., Sharon, G., Tolpin, D., Betzalel, O., Shimony, E.: ICBS: improved conflict-based search algorithm for multi-agent pathfinding. In: IJCAI, pp. 740–746. AAAI Press, Buenos Aires, Argentina (2015)
2015
-
[4]
IEEE Robot
Buoso, D., Robinson, L., Averta, G., Torr, P., Franzmeyer, T., De Martini, D.: Select2plan: Training-free icl-based planning through vqa and memory retrieval. IEEE Robot. Autom. Lett.10(11), 11,267–11,274 (2025)
2025
-
[5]
Chaumette, F., Hutchinson, S.: Visual servo control. i. basic approaches. IEEE Robot. Autom. Mag.13(4), 82–90 (2006)
2006
-
[6]
Coulter, R.C.: Implementation of the pure pursuit path tracking algorithm. Tech. Rep. CMU-RI-TR-92-01, Carnegie Mellon University, Pittsburgh, PA (1992)
1992
-
[7]
IEEE Trans
Dixon, W., Dawson, D., Zergeroglu, E., Behal, A.: Adaptive tracking control of a wheeled mobile robot via an uncalibrated camera system. IEEE Trans. Syst. Man Cybern. B Cybern.31(3), 341–352 (2001)
2001
-
[8]
In: IDAP, pp
D¨ onmez, E., Kocamaz, A.F.: The eye-out-device multi-camera expansion for mobile robot control. In: IDAP, pp. 1–6. IEEE (2019)
2019
-
[9]
IEEE Robot
Kim, M., Kwon, Y., Lee, S., Yoon, S.e.: CCTV-informed human-aware robot nav- igation in crowded indoor environments. IEEE Robot. Autom. Lett.9(6), 5767– 5774 (2024) 16 Luke Robinson et al
2024
-
[10]
IEEE Trans
Liang, X., Wang, H., Liu, Y.H., Liu, Z., You, B., Jing, Z., Chen, W.: Purely image- based pose stabilization of nonholonomic mobile robots with a truly uncalibrated overhead camera. IEEE Trans. Robot.36(3), 724–742 (2020)
2020
-
[11]
In: ICRA, vol
Poduri, S., Sukhatme, G.S.: Constrained coverage for mobile sensor networks. In: ICRA, vol. 1, pp. 165–171. IEEE (2004)
2004
-
[12]
In: AIR, pp
Poornima, J., Krishnapuram, R., Bharatheesha, M., Amrutur, B., Sundaram, S.: Robust and scalable indoor robot localization based on fusion of infrastructure camera feeds and on-board sensors. In: AIR, pp. 1–7. Association for Computing Machinery, New York, NY, USA (2023)
2023
-
[13]
In: CCC, pp
Qingsong, L., Chaoli, W., Wenbin, N.: Tracking of nonholonomic control systems based on visual servoing feedback. In: CCC, pp. 459–463 (2007)
2007
-
[14]
In: ECSA, vol
Ravankar, A., Ravankar, A., Kobayashi, Y., Emaru, T.: Intelligent robot guidance in fixed external camera network for navigation in crowded and narrow passages. In: ECSA, vol. 1, p. 37. MDPI (2016)
2016
-
[15]
Ravi, N., Gabeur, V., Hu, Y.T., Hu, R., Ryali, C., Ma, T., Khedr, H., R¨ adle, R., Rolland, C., Gustafson, L., Mintun, E., Pan, J., Alwala, K.V., Carion, N., Wu, C.Y., Girshick, R., Doll´ ar, P., Feichtenhofer, C.: Sam 2: Segment anything in images and videos (2024)
2024
-
[16]
In: IROS (2023)
Robinson, L., De Martini, D., Gadd, M., Newman, P.: Visual Servoing on Wheels: Robust Robot Orientation Estimation in Remote Viewpoint Control. In: IROS (2023)
2023
-
[17]
In: ISER, pp
Robinson, L., Gadd, M., Newman, P., Martini, D.D.: Robot-relay: Building-wide, calibration-less visual servoing with learned sensor handover networks. In: ISER, pp. 129–140. Springer (2023)
2023
-
[18]
Robinson, L., Gadd, M., Newman, P., Martini, D.D.: Robot-relay: building-wide, calibration-less visual servoing with learned sensor handover networks. Auton. Robots50(1), 3 (2025)
2025
-
[19]
Sharon, G., Stern, R., Felner, A., Sturtevant, N.R.: Conflict-based search for opti- mal multi-agent pathfinding. Artif. Intell.219, 40–66 (2015)
2015
-
[20]
Sensors16(2), 195 (2016)
Shim, J., Cho, Y.: A mobile robot localization via indoor fixed remote surveillance cameras. Sensors16(2), 195 (2016)
2016
-
[21]
AIIDE1(1), 117–122 (2005)
Silver, D.: Cooperative pathfinding. AIIDE1(1), 117–122 (2005)
2005
-
[22]
Simoens, P., Dragone, M., Saffiotti, A.: The internet of robotic things: A re- view of concept, added value and applications. Int. J. Adv. Robot. Syst.15(1), 1729881418759,424 (2018)
2018
-
[23]
Stern, R.: Multi-Agent Path Finding – An Overview, p. 96–115. Springer-Verlag, Berlin, Heidelberg (2022)
2022
-
[24]
In: ADICS, pp
Varghese, R., Sambath, M.: Yolov8: A novel object detection algorithm with en- hanced performance and robustness. In: ADICS, pp. 1–6 (2024)
2024
-
[25]
In: IROS, pp
Wagner, G., Choset, H.: M*: A complete multirobot path planning algorithm with performance bounds. In: IROS, pp. 3260–3267. IEEE, San Francisco, CA (2011)
2011
-
[26]
IET Comput
Whitaker, T.J., Cunningham, S.J., Bobda, C.: Decentralised indoor smart cam- era mapping and hierarchical navigation for autonomous ground vehicles. IET Comput. Vis.14(7), 462–470 (2020)
2020
-
[27]
Yang, F., Su, H., Wang, C., Li, Z.: Adaptive and sliding mode tracking control for wheeled mobile robots with unknown visual parameters. Trans. Inst. Meas. Control40(1), 269–278 (2018)
2018
-
[28]
Zhong, D., Robinson, L., Martini, D.D.: NeRFoot: Robot-footprint estimation for image-based visual servoing (2024)
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.