When Should an AI Scientist Stop? Verifiable Experiment Steering and Refusal for Autonomous Discovery
Pith reviewed 2026-06-29 18:35 UTC · model grok-4.3
The pith
CARTOGRAPH adds experiment steering, ambiguity closure, and residual refusal to autonomous AI discovery.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
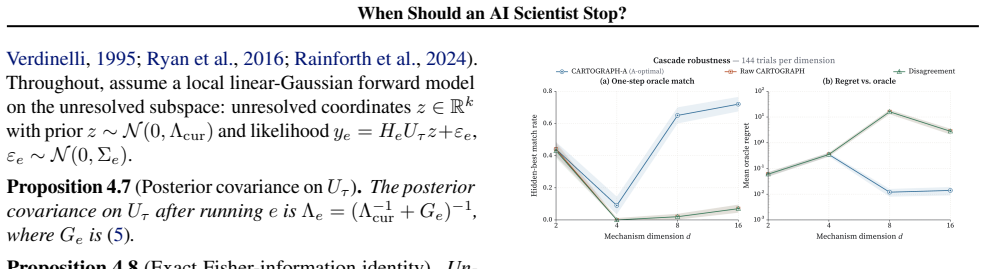
Under a local linear-Gaussian bridge, raw unresolved projection is the isotropic unresolved Fisher-information trace while CARTOGRAPH-A is the exact unresolved A-optimal rule; the refuse guard, driven by residual exposure of structural misfit, revokes tentative out-of-library identifications and flags inconclusive claims while accepting confirmed ones.
What carries the argument
CARTOGRAPH, a verification layer that couples unresolved-subspace experiment steering, explicit ambiguity closure, and residual-based library inadequacy detection.
If this is right
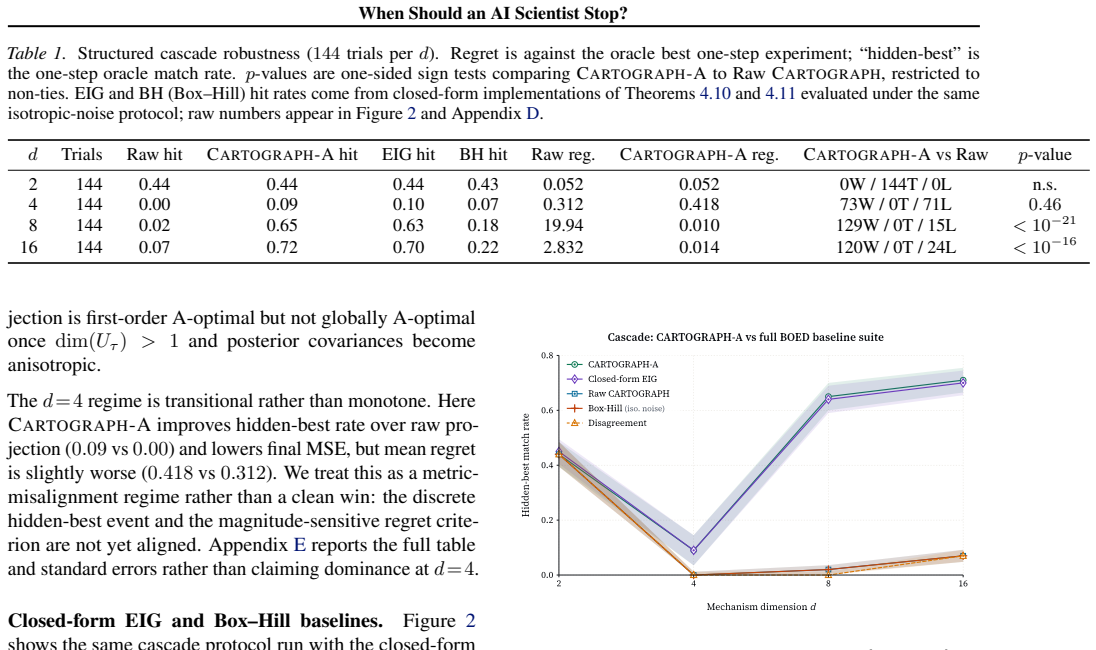
- CARTOGRAPH-A beats raw projection 129 wins to 15 losses at dimension 8 in replicated structured cascades.
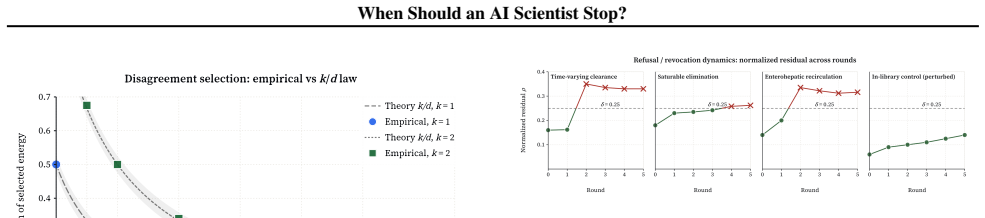
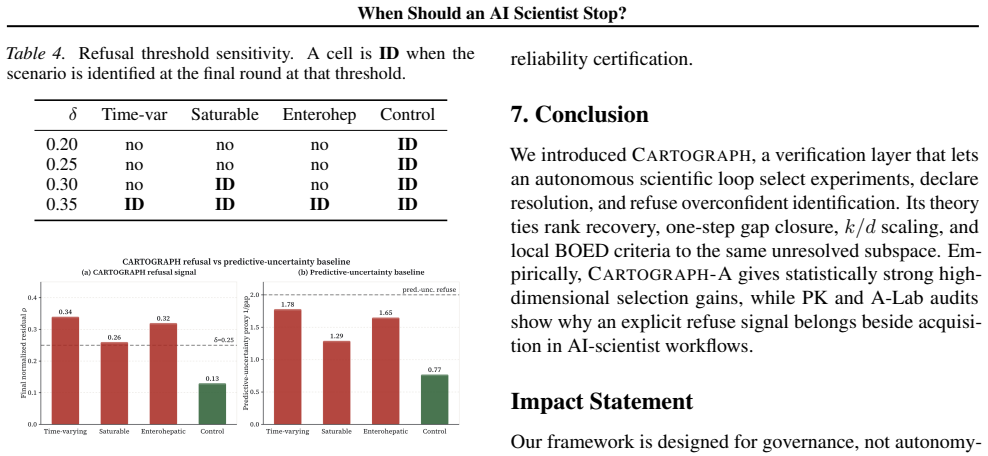
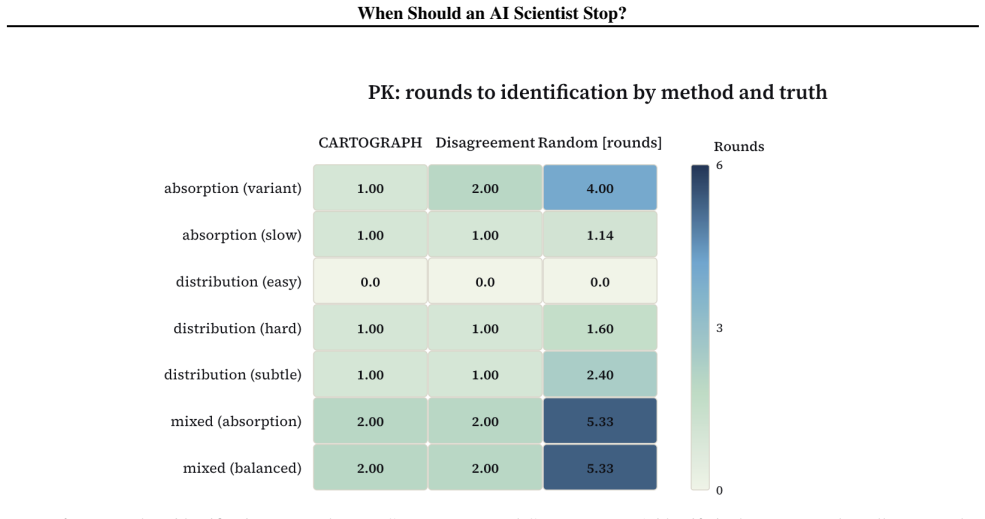
- The framework can tentatively identify three out-of-library pharmacokinetic mechanisms and then revoke them when residuals expose misfit while keeping an in-library control identified.
- In low-dimensional pharmacokinetic and filtered EPA settings the framework predicts and observes near-ties against disagreement.
- The refuse guard flags all 4 inconclusive claims from 40 A-Lab positive claims while passing 32 of 36 confirmed ones.
Where Pith is reading between the lines
- The select-resolve-refuse structure could be tested in non-pharmacokinetic discovery domains to check whether residual-based refusal generalizes beyond the reported settings.
- If the local linear-Gaussian bridge holds only approximately, the framework might still provide useful conservative steering even when exact optimality no longer applies.
- The audit result suggests that adding an explicit refusal step could lower the rate of later-retracted claims in other published autonomous systems.
Load-bearing premise
The optimality derivations and performance results assume a local linear-Gaussian bridge relating unresolved projection to Fisher-information quantities.
What would settle it
A new replicated test at dimension 8 in which CARTOGRAPH-A fails to outperform raw projection, or a fresh set of discovery claims in which the refuse guard passes an inconclusive result or rejects a confirmed one.
Figures
read the original abstract
We present CARTOGRAPH, a verification layer for AI scientists that couples unresolved-subspace experiment steering (select), explicit ambiguity closure (resolve), and residual-based library inadequacy detection (refuse). Under a local linear-Gaussian bridge, raw unresolved projection is the isotropic unresolved Fisher-information trace, while CARTOGRAPH-A is the exact unresolved A-optimal rule; closed-form EIG and Box-Hill arise as local comparators rather than global equivalents. Across five testbeds, CARTOGRAPH-A beats raw projection 129W/0T/15L at d = 8 (p < 10^-21) in a replicated structured cascade. More distinctively, the framework tentatively identifies three out-of-library pharmacokinetic mechanisms and then revokes those identifications as residuals expose structural misfit, while one perturbed in-library control stays identified throughout. In low-dimensional pharmacokinetic and filtered EPA settings, near-ties against disagreement are predicted by theory and observed. Finally, in a retrospective audit of 40 positive claims from the published A-Lab autonomous materials system, the refuse guard flags all 4 claims later marked inconclusive under manual reanalysis while passing 32/36 confirmed claims. Code is available at https://github.com/ai4science-boed/cartograph.git
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces CARTOGRAPH, a verification layer for AI scientists coupling unresolved-subspace experiment steering (CARTOGRAPH-A), ambiguity closure (resolve), and residual-based library inadequacy detection (refuse). Under a local linear-Gaussian bridge, raw unresolved projection equals the isotropic unresolved Fisher-information trace and CARTOGRAPH-A is the exact unresolved A-optimal rule, with closed-form EIG and Box-Hill as local comparators. Across five testbeds, CARTOGRAPH-A outperforms raw projection 129W/0T/15L at d=8 (p<10^{-21}) in a replicated structured cascade; it identifies then revokes three out-of-library pharmacokinetic mechanisms via residuals while retaining an in-library control; near-ties against disagreement are observed in low-dimensional settings; and a retrospective audit on 40 A-Lab positive claims shows the refuse guard flags all 4 later-inconclusive claims while passing 32/36 confirmed ones. Code is provided.
Significance. If the results hold, this provides a substantive advance in verifiable autonomous discovery by supplying explicit mechanisms for steering, resolution, and refusal that can reduce overconfident claims. Strengths include the open code repository, the replicated cascade experiments with strong win rates, the identify-then-revoke demonstration on pharmacokinetic mechanisms, and the retrospective audit on published A-Lab data. The work directly addresses a practical gap in deciding when an AI scientist should stop or refuse.
major comments (2)
- [Abstract / Theory] Abstract and theory derivation: optimality of CARTOGRAPH-A as the exact unresolved A-optimal rule and equivalence of raw unresolved projection to the isotropic unresolved Fisher-information trace are obtained only under the local linear-Gaussian bridge assumption. The five testbeds include non-linear pharmacokinetic mechanisms, yet no diagnostics (local Hessian linearity, residual Gaussianity, or approximation-error bounds) are supplied to confirm the bridge remains accurate enough to explain the 129W/0T/15L results or the identify-then-revoke behavior. This is load-bearing for linking theory to the reported performance.
- [A-Lab retrospective audit] A-Lab retrospective audit section: the audit evaluates only the refuse guard on 40 positive claims and does not test the steering rule (CARTOGRAPH-A) under the local linear-Gaussian bridge; this limits the audit's ability to validate the full framework's central claims.
minor comments (1)
- [Results] The p-value p < 10^{-21} is reported for the 129W/0T/15L outcome; the exact statistical test, multiple-comparison correction, and replication details should be stated explicitly in the methods.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed review. We address each major comment below, indicating planned revisions where the manuscript can be strengthened.
read point-by-point responses
-
Referee: [Abstract / Theory] Abstract and theory derivation: optimality of CARTOGRAPH-A as the exact unresolved A-optimal rule and equivalence of raw unresolved projection to the isotropic unresolved Fisher-information trace are obtained only under the local linear-Gaussian bridge assumption. The five testbeds include non-linear pharmacokinetic mechanisms, yet no diagnostics (local Hessian linearity, residual Gaussianity, or approximation-error bounds) are supplied to confirm the bridge remains accurate enough to explain the 129W/0T/15L results or the identify-then-revoke behavior. This is load-bearing for linking theory to the reported performance.
Authors: The referee is correct that the optimality and equivalence results are derived under the local linear-Gaussian bridge. The pharmacokinetic testbeds contain non-linear dynamics, and the manuscript does not supply explicit diagnostics (e.g., residual normality tests or local Hessian linearity checks) to quantify approximation quality. We will revise the manuscript to include such diagnostics for the key testbeds, along with a brief discussion of when the local bridge is expected to remain useful. revision: yes
-
Referee: [A-Lab retrospective audit] A-Lab retrospective audit section: the audit evaluates only the refuse guard on 40 positive claims and does not test the steering rule (CARTOGRAPH-A) under the local linear-Gaussian bridge; this limits the audit's ability to validate the full framework's central claims.
Authors: The retrospective audit is deliberately scoped to the refuse guard because it evaluates residual-based detection against published A-Lab claims whose final status (confirmed or inconclusive) is known from later manual reanalysis. The steering rule is instead validated on the controlled testbeds where ground-truth parameter values and experimental outcomes are available. A retrospective test of CARTOGRAPH-A would require the original sequence of designs, parameter estimates, and intermediate residuals from the A-Lab runs, which are not reported in the source publications. We will add a clarifying sentence on this scope distinction but do not plan to expand the audit itself. revision: no
Circularity Check
No circularity: derivations are conditional on explicit assumption and empirical results are independent
full rationale
The paper explicitly conditions its optimality claims on the local linear-Gaussian bridge assumption and derives the stated equalities (raw projection = isotropic Fisher trace; CARTOGRAPH-A = unresolved A-optimal) directly from that assumption rather than by redefining inputs or fitting parameters from the target data. The reported wins (129W/0T/15L), identify-then-revoke behavior, and A-Lab retrospective audit are presented as separate empirical evaluations on held-out or external testbeds; no step renames a fitted quantity as a prediction or reduces the central result to a self-citation chain. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption local linear-Gaussian bridge
invented entities (1)
-
CARTOGRAPH
no independent evidence
Reference graph
Works this paper leans on
-
[1]
and MacKnight, Robert and Kline, Ben and Gomes, Gabe , title =
Boiko, Daniil A. and MacKnight, Robert and Kline, Ben and Gomes, Gabe , title =. Nature , year =
-
[2]
The AI Scientist: Towards Fully Automated Open-Ended Scientific Discovery
Lu, Chris and Lu, Cong and Lange, Robert Tjarko and Foerster, Jakob and Clune, Jeff and Ha, David , title =. arXiv preprint arXiv:2408.06292 , year =
work page internal anchor Pith review Pith/arXiv arXiv
-
[3]
and Rendy, Bernardus and Fei, Yuxing and Kumar, Rishi E
Szymanski, Nathan J. and Rendy, Bernardus and Fei, Yuxing and Kumar, Rishi E. and He, Tanjin and Milsted, David and McDermott, Matthew J. and Gallant, Max and Cubuk, Ekin Dogus and Merchant, Amil and Kim, Haegyeom and Jain, Anubhav and Bartel, Christopher J. and Persson, Kristin and Zeng, Yan and Ceder, Gerbrand , title =. Nature , year =
-
[4]
and Aykol, Muratahan and Cheon, Gowoon and Cubuk, Ekin Dogus , title =
Merchant, Amil and Batzner, Simon and Schoenholz, Samuel S. and Aykol, Muratahan and Cheon, Gowoon and Cubuk, Ekin Dogus , title =. Nature , year =
-
[5]
Highly accurate protein structure prediction with
Jumper, John and Evans, Richard and Pritzel, Alexander and Green, Tim and Figurnov, Michael and Ronneberger, Olaf and Tunyasuvunakool, Kathryn and Bates, Russ and. Highly accurate protein structure prediction with. Nature , year =
-
[6]
Wang, Hanchen and Fu, Tianfan and Du, Yuanqi and Gao, Wenhao and Huang, Kexin and Liu, Ziming and Chandak, Payal and Liu, Shengchao and Van Katwyk, Peter and Deac, Andreea and Anandkumar, Anima and Bergen, Karianne and Gomes, Carla P. and Ho, Shirley and Kohli, Pushmeet and Lasenby, Joan and Leskovec, Jure and Liu, Tie-Yan and Manrai, Arjun and Marks, Deb...
2023
-
[7]
and Rowland, Jem and Oliver, Stephen G
King, Ross D. and Rowland, Jem and Oliver, Stephen G. and Young, Michael and Aubrey, Wayne and Byrne, Emma and Liakata, Maria and Markham, Magdalena and Pir, Pinar and Soldatova, Larisa N. and Sparkes, Andrew and Whelan, Kenneth E. and Clare, Amanda , title =. Science , year =
-
[8]
and Gusev, Vladimir V
Burger, Benjamin and Maffettone, Phillip M. and Gusev, Vladimir V. and Aitchison, Catherine M. and Bai, Yang and Wang, Xiaoyan and Li, Xiaobo and Alston, Ben M. and Li, Buyi and Clowes, Rob and Rankin, Nicola and Harris, Brandon and Sprick, Reiner Sebastian and Cooper, Andrew I. , title =. Nature , year =
-
[9]
, title =
Lindley, Dennis V. , title =. The Annals of Mathematical Statistics , year =
-
[10]
Statistical Science , year =
Chaloner, Kathryn and Verdinelli, Isabella , title =. Statistical Science , year =
-
[11]
and Drovandi, Christopher C
Ryan, Elizabeth G. and Drovandi, Christopher C. and McGree, James M. and Pettitt, Anthony N. , title =. International Statistical Review , year =
-
[12]
and Smith, Freddie Bickford , title =
Rainforth, Tom and Foster, Adam and Ivanova, Desi R. and Smith, Freddie Bickford , title =. Statistical Science , year =
-
[13]
Advances in Neural Information Processing Systems (NeurIPS) , year =
Foster, Adam and Jankowiak, Martin and Bingham, Eli and Horsfall, Paul and Teh, Yee Whye and Rainforth, Tom and Goodman, Noah , title =. Advances in Neural Information Processing Systems (NeurIPS) , year =
-
[14]
, title =
Kleinegesse, Steven and Gutmann, Michael U. , title =. International Conference on Machine Learning (ICML) , year =
-
[15]
and Chades, Iadine and Dezfouli, Amir , title =
Blau, Tom and Bonilla, Edwin V. and Chades, Iadine and Dezfouli, Amir , title =. International Conference on Machine Learning (ICML) , year =
-
[16]
Box, George E. P. and Hill, William J. , title =. Technometrics , year =
-
[17]
and Fedorov, Valerii V
Atkinson, Anthony C. and Fedorov, Valerii V. , title =. Biometrika , year =
-
[18]
Pukelsheim, Friedrich , title =
-
[19]
and Malik, Ilyas and Rainforth, Tom , title =
Foster, Adam and Ivanova, Desi R. and Malik, Ilyas and Rainforth, Tom , title =. International Conference on Machine Learning (ICML) , year =
-
[20]
and Hilbers, Peter A
Vanlier, Joep and Tiemann, Christian A. and Hilbers, Peter A. J. and van Riel, Natal A. W. , title =. BMC Systems Biology , year =
-
[21]
Science , year =
Schmidt, Michael and Lipson, Hod , title =. Science , year =
-
[22]
and Proctor, Joshua L
Brunton, Steven L. and Proctor, Joshua L. and Kutz, J. Nathan , title =. Proceedings of the National Academy of Sciences , year =
-
[23]
Science Advances , year =
Udrescu, Silviu-Marian and Tegmark, Max , title =. Science Advances , year =
-
[24]
Advances in Neural Information Processing Systems (NeurIPS) , year =
Cranmer, Miles and Sanchez-Gonzalez, Alvaro and Battaglia, Peter and Xu, Rui and Cranmer, Kyle and Spergel, David and Ho, Shirley , title =. Advances in Neural Information Processing Systems (NeurIPS) , year =
-
[25]
International Conference on Machine Learning (ICML) , year =
Gal, Yarin and Ghahramani, Zoubin , title =. International Conference on Machine Learning (ICML) , year =
-
[26]
International Conference on Learning Representations (ICLR) , year =
Hendrycks, Dan and Gimpel, Kevin , title =. International Conference on Learning Representations (ICLR) , year =
-
[27]
Learning under model misspecification: Applications to variational and ensemble methods , booktitle =
Masegosa, Andr. Learning under model misspecification: Applications to variational and ensemble methods , booktitle =
-
[28]
Advances in Neural Information Processing Systems (NIPS) , year =
Lakshminarayanan, Balaji and Pritzel, Alexander and Blundell, Charles , title =. Advances in Neural Information Processing Systems (NIPS) , year =
-
[29]
Geisser, Seymour , title =
-
[30]
Machine Learning and Knowledge Discovery in Databases , year =
Kull, Meelis and Flach, Peter , title =. Machine Learning and Knowledge Discovery in Databases , year =
-
[31]
and Van Loan, Charles F
Golub, Gene H. and Van Loan, Charles F. , title =
-
[32]
Hansen, Per Christian , title =
-
[33]
Stewart, G. W. , title =. SIAM Review , year =
-
[34]
and Wambaugh, John F
Sayre, Risa R. and Wambaugh, John F. and Grulke, Christopher M. , title =. Scientific Data , year =
-
[35]
Gabrielsson, Johan and Weiner, Daniel , title =
-
[36]
International Conference on Learning Representations (ICLR) , year =
Yao, Shunyu and Zhao, Jeffrey and Yu, Dian and Du, Nan and Shafran, Izhak and Narasimhan, Karthik and Cao, Yuan , title =. International Conference on Learning Representations (ICLR) , year =
-
[37]
Toolformer: Language models can teach themselves to use tools , booktitle =
Schick, Timo and Dwivedi-Yu, Jane and Dess. Toolformer: Language models can teach themselves to use tools , booktitle =
-
[38]
Nature Machine Intelligence , year =
Bran, Andres M and Cox, Sam and Schilter, Oliver and Baldassari, Carlo and White, Andrew D and Schwaller, Philippe , title =. Nature Machine Intelligence , year =
-
[39]
Concrete Problems in AI Safety
Amodei, Dario and Olah, Chris and Steinhardt, Jacob and Christiano, Paul and Schulman, John and Man. Concrete problems in. arXiv preprint arXiv:1606.06565 , year =
work page internal anchor Pith review Pith/arXiv arXiv
-
[40]
Proceedings of the Conference on Fairness, Accountability, and Transparency (FAT*) , year =
Mitchell, Margaret and Wu, Simone and Zaldivar, Andrew and Barnes, Parker and Vasserman, Lucy and Hutchinson, Ben and Spitzer, Elena and Raji, Inioluwa Deborah and Gebru, Timnit , title =. Proceedings of the Conference on Fairness, Accountability, and Transparency (FAT*) , year =
-
[41]
Ethical and social risks of harm from Language Models
Weidinger, Laura and Mellor, John and Rauh, Maribeth and Griffin, Conor and Uesato, Jonathan and Huang, Po-Sen and Cheng, Myra and Glaese, Mia and Balle, Borja and Kasirzadeh, Atoosa and others , title =. arXiv preprint arXiv:2112.04359 , year =
work page internal anchor Pith review Pith/arXiv arXiv
-
[42]
Mathematics and Computers in Simulation , volume =
Pronzato, Luc and Walter, Eric , title =. Mathematics and Computers in Simulation , volume =
-
[43]
and Leonov, Sergei L
Fedorov, Valerii V. and Leonov, Sergei L. , title =
-
[44]
Reid, D. D. , title =. Biometrika , volume =
-
[45]
and Raftery, Adrian E
Kass, Robert E. and Raftery, Adrian E. , title =. Journal of the American Statistical Association , volume =
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.