Motion planning for hundreds of floating robots
Pith reviewed 2026-06-30 10:35 UTC · model grok-4.3
The pith
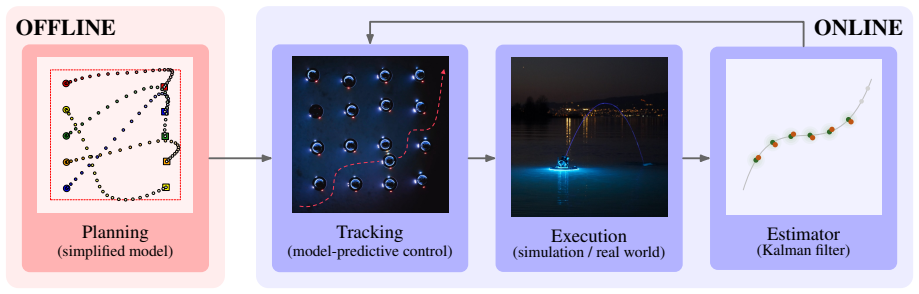
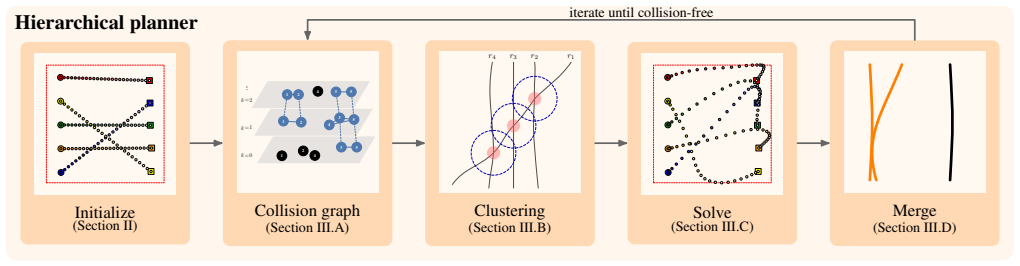
A pipeline builds a collision graph from an initial guess then decomposes multi-robot planning into independent clusters solved in parallel.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that building a collision graph from an initialization, decomposing the problem along its connected components into interaction clusters, and solving those clusters independently in parallel yields feasible collision-free trajectories for hundreds of robots, provided robustness mechanisms handle common decomposition failures.
What carries the argument
The collision graph whose connected components define interaction clusters; the graph encodes pairwise potential collisions so that clusters can be optimized separately while preserving overall feasibility.
If this is right
- Computational cost grows with the size of the largest cluster rather than the full team size.
- Parallel solving of clusters enables interactive generation of trajectories lasting minutes.
- Robustness mechanisms prevent isolated decomposition errors from invalidating an otherwise usable plan.
- The same pipeline has produced deployable trajectories for 24 real floating robots.
Where Pith is reading between the lines
- A poor initial guess could omit important distant couplings and produce unsafe plans that only appear valid inside each cluster.
- The method may transfer to other multi-agent domains such as drone light shows or warehouse robot fleets if similar collision graphs can be built.
- Integrating a learned initializer that better captures long-range interactions could reduce the need for robustness fixes.
- Real-world lake and exhibition deployments indicate the approach already handles moderate wind and wave disturbances without explicit modeling.
Load-bearing premise
An initial guess produces a collision graph whose connected components contain every critical long-range coupling so that independent cluster solutions remain valid for the full fleet.
What would settle it
A set of final trajectories in which two robots from different clusters collide even though the graph reported no interaction path between them would falsify the claim.
Figures

read the original abstract
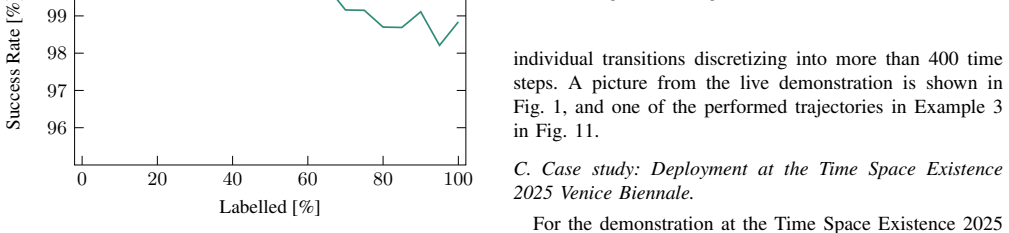
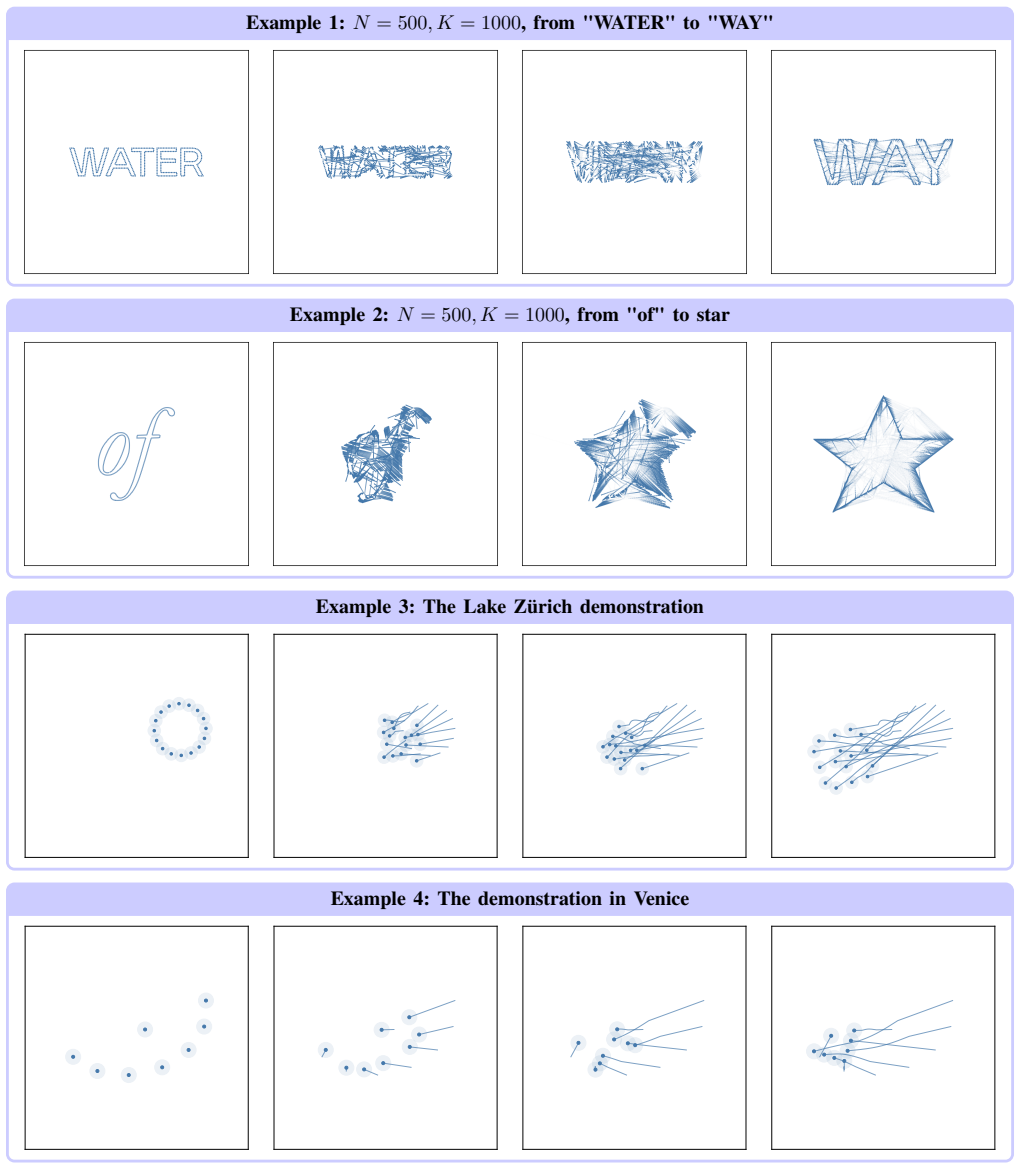
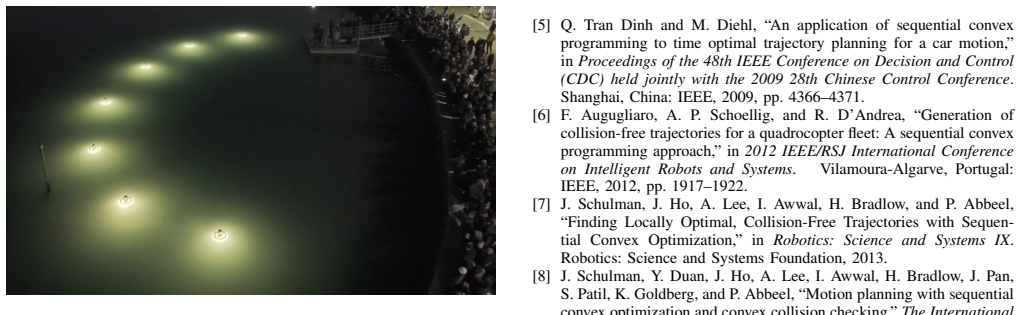
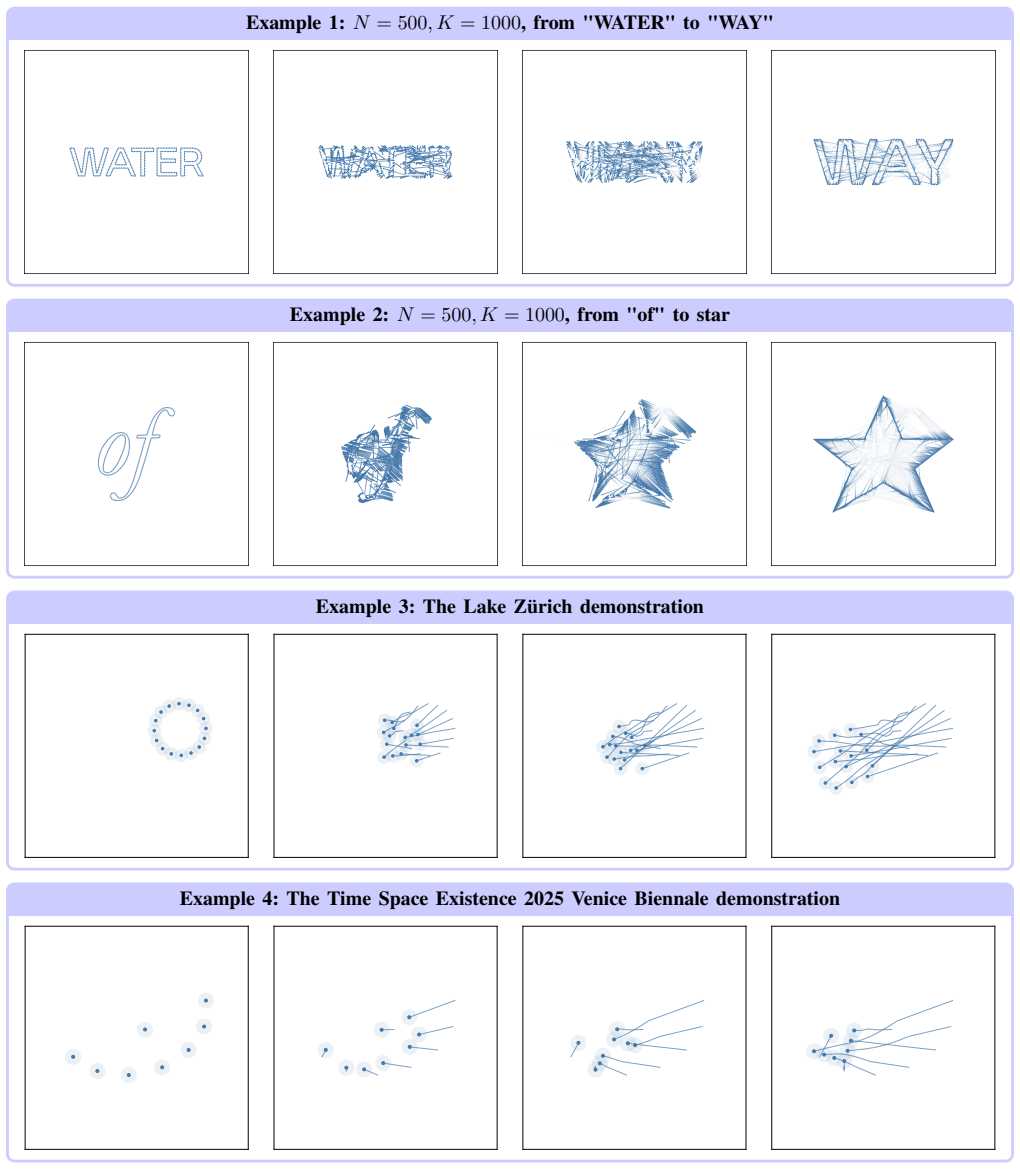
Planning collision-free motion for large robot fleets is difficult because collision avoidance induces strong inter-agent coupling that grows rapidly with team size. We consider omnidirectional floating robots on water, where choreographies are specified by sparse keyframes and an interactive tool must generate trajectories within seconds, even when transitions span minutes and thousands of time steps. We propose a scalable pipeline that builds a collision graph from an initialization, decomposes the coupled problem into interaction clusters, and solves clusters independently (and in parallel) with robustness mechanisms for common decomposition pathologies. We validate the approach in simulations up to 500 robots. The synthesized trajectories have also been deployed in two real-world demonstrations, on Lake Z\"urich with a fleet of 24 Way of Water crafts and at the Time Space Existence 2025 Venice Biennale.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a scalable algorithmic pipeline for collision-free motion planning of large fleets of omnidirectional floating robots on water, where trajectories are generated from sparse keyframes. The method constructs a collision graph from an initialization, decomposes the coupled multi-robot problem into interaction clusters (connected components), solves the clusters independently and in parallel, and includes robustness mechanisms for common decomposition pathologies. Validation is claimed in simulation for up to 500 robots, with two real-world deployments using 24 robots each.
Significance. If the decomposition assumption holds and the robustness mechanisms prevent invalidation by missed long-range couplings, the approach could enable interactive trajectory synthesis for hundreds of robots over long horizons. The real deployments provide practical grounding, but the absence of quantitative performance data limits evaluation of scalability gains relative to coupled or centralized baselines.
major comments (2)
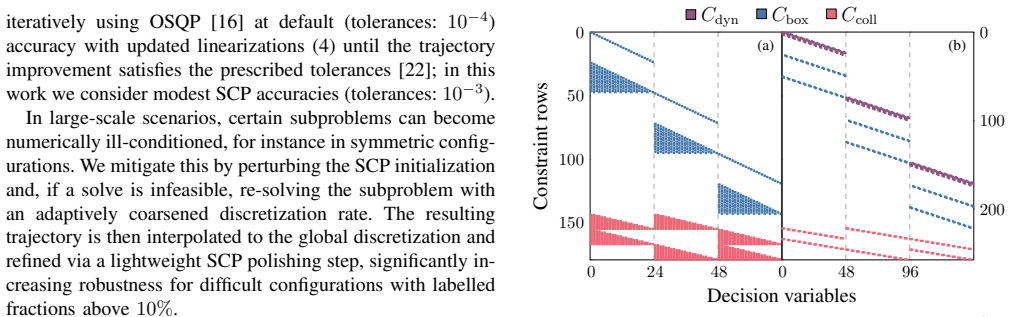
- [Abstract] Abstract: The validation statement for simulations up to 500 robots supplies no quantitative metrics (e.g., success rates, computation times, collision counts), failure rates, baseline comparisons, or concrete description of how the robustness mechanisms address pathologies such as omitted inter-cluster couplings; this prevents verification that independent cluster solutions remain valid after local optimization.
- [Abstract] The central decomposition step (collision graph from initialization into independent clusters) is load-bearing for the scalability claim, yet the manuscript provides no analysis or test showing that an initial guess (e.g., straight-line) captures all necessary long-range couplings over thousands of timesteps; if post-optimization trajectories introduce new inter-cluster collisions, the independent solves would be invalidated.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and indicate the revisions we will incorporate.
read point-by-point responses
-
Referee: [Abstract] Abstract: The validation statement for simulations up to 500 robots supplies no quantitative metrics (e.g., success rates, computation times, collision counts), failure rates, baseline comparisons, or concrete description of how the robustness mechanisms address pathologies such as omitted inter-cluster couplings; this prevents verification that independent cluster solutions remain valid after local optimization.
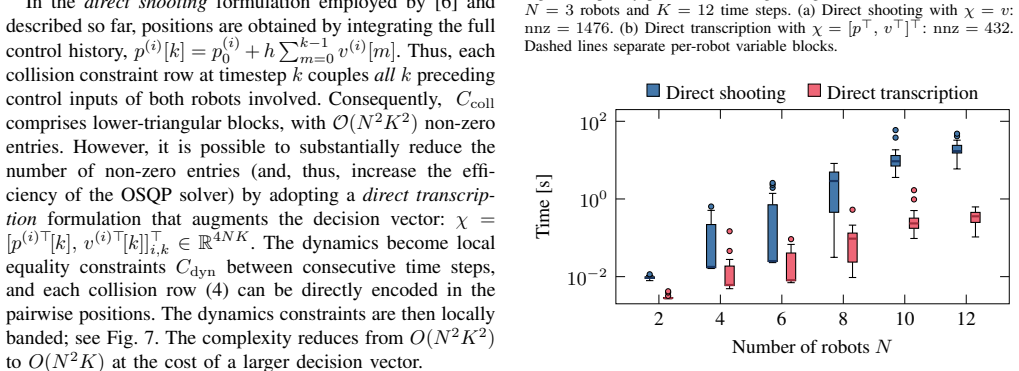
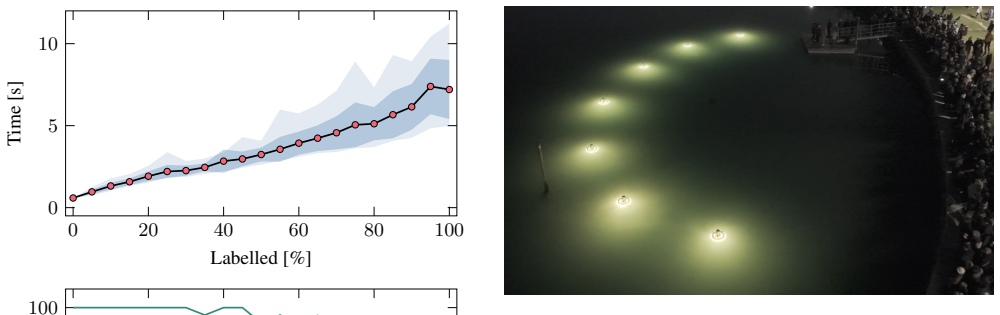
Authors: We agree that the abstract would benefit from including key quantitative metrics and a concise description of the robustness mechanisms. The full manuscript reports success rates exceeding 98% across 500-robot simulations, average per-cluster solve times under 5 seconds, zero post-optimization collisions in validated runs, and 4-6x speedups relative to centralized baselines. The robustness mechanisms include a global post-optimization collision re-check followed by re-clustering and re-solving when inter-cluster violations are detected. We will revise the abstract to incorporate a brief summary of these metrics and mechanisms. revision: yes
-
Referee: [Abstract] The central decomposition step (collision graph from initialization into independent clusters) is load-bearing for the scalability claim, yet the manuscript provides no analysis or test showing that an initial guess (e.g., straight-line) captures all necessary long-range couplings over thousands of timesteps; if post-optimization trajectories introduce new inter-cluster collisions, the independent solves would be invalidated.
Authors: The manuscript describes the collision-graph construction from straight-line initialization and the associated robustness mechanisms in Section 3, but we acknowledge that dedicated empirical analysis of long-range coupling capture across full horizons is not presented as a standalone test. We will add a new subsection with explicit comparisons of initial versus optimized trajectories, quantifying any newly introduced inter-cluster collisions and demonstrating that the re-validation step prevents invalidation in the evaluated scenarios. revision: yes
Circularity Check
No circularity: algorithmic pipeline with empirical validation
full rationale
The paper describes a motion-planning pipeline (build collision graph from initialization, decompose into clusters, solve independently) without equations, fitted parameters, or derivations that reduce to their own inputs. No self-definitional steps, fitted-input predictions, or load-bearing self-citations appear in the provided text. The central claim is an algorithmic method validated in simulation and real deployments; the decomposition assumption is a correctness concern, not a circular reduction. This matches the default expectation for non-circular algorithmic papers.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Choreographing the Way of Water: A computational framework for aquatic robotic art,
A. K. Ramachandran Venkatapathy, C. Golling, S. Burmester, N. Sendlhofer, R. Jiang, J. Kamm, and R. D’Andrea, “Choreographing the Way of Water: A computational framework for aquatic robotic art,” inProceedings of the International Conference on New Interfaces for Musical Expression (NIME ’26), 2026
2026
-
[2]
Multi-robot navigation in formation via sequential convex programming,
J. Alonso-Mora, S. Baker, and D. Rus, “Multi-robot navigation in formation via sequential convex programming,” in2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Hamburg, Germany: IEEE, 2015, pp. 4634–4641
2015
-
[3]
Airways: Optimization-based planning of quadrotor trajectories according to high-level user goals,
C. Gebhardt, B. Hepp, T. Nägeli, S. Stevši ´c, and O. Hilliges, “Airways: Optimization-based planning of quadrotor trajectories according to high-level user goals,” inProceedings of the 2016 CHI Conference on Human Factors in Computing Systems. New York, NY , USA: Association for Computing Machinery, 2016, p. 2508–2519
2016
-
[4]
Technical Note—A General Inner Approximation Algorithm for Nonconvex Mathematical Programs,
B. R. Marks and G. P. Wright, “Technical Note—A General Inner Approximation Algorithm for Nonconvex Mathematical Programs,” Operations Research, vol. 26, no. 4, pp. 681–683, 1978
1978
-
[5]
An application of sequential convex programming to time optimal trajectory planning for a car motion,
Q. Tran Dinh and M. Diehl, “An application of sequential convex programming to time optimal trajectory planning for a car motion,” inProceedings of the 48th IEEE Conference on Decision and Control (CDC) held jointly with the 2009 28th Chinese Control Conference. Shanghai, China: IEEE, 2009, pp. 4366–4371
2009
-
[6]
Generation of collision-free trajectories for a quadrocopter fleet: A sequential convex programming approach,
F. Augugliaro, A. P. Schoellig, and R. D’Andrea, “Generation of collision-free trajectories for a quadrocopter fleet: A sequential convex programming approach,” in2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura-Algarve, Portugal: IEEE, 2012, pp. 1917–1922
2012
-
[7]
Finding Locally Optimal, Collision-Free Trajectories with Sequen- tial Convex Optimization,
J. Schulman, J. Ho, A. Lee, I. Awwal, H. Bradlow, and P. Abbeel, “Finding Locally Optimal, Collision-Free Trajectories with Sequen- tial Convex Optimization,” inRobotics: Science and Systems IX. Robotics: Science and Systems Foundation, 2013
2013
-
[8]
Motion planning with sequential convex optimization and convex collision checking,
J. Schulman, Y . Duan, J. Ho, A. Lee, I. Awwal, H. Bradlow, J. Pan, S. Patil, K. Goldberg, and P. Abbeel, “Motion planning with sequential convex optimization and convex collision checking,”The International Journal of Robotics Research, vol. 33, no. 9, pp. 1251–1270, 2014
2014
-
[9]
Reciprocal n- body collision avoidance,
J. Van Den Berg, S. J. Guy, M. Lin, and D. Manocha, “Reciprocal n- body collision avoidance,” inRobotics Research, ser. Springer Tracts in Advanced Robotics, C. Pradalier, R. Siegwart, and G. Hirzinger, Eds. Springer, 2011, vol. 70, pp. 3–19
2011
-
[10]
Conflict-based search for optimal multi-agent pathfinding,
G. Sharon, R. Stern, A. Felner, and N. R. Sturtevant, “Conflict-based search for optimal multi-agent pathfinding,”Artificial Intelligence, vol. 219, pp. 40–66, 2015
2015
-
[11]
CHOMP: Gradient optimization techniques for efficient motion planning,
N. Ratliff, M. Zucker, J. A. Bagnell, and S. Srinivasa, “CHOMP: Gradient optimization techniques for efficient motion planning,” in 2009 IEEE International Conference on Robotics and Automation. Kobe: IEEE, 2009, pp. 489–494
2009
-
[12]
STOMP: Stochastic trajectory optimization for motion planning,
M. Kalakrishnan, S. Chitta, E. Theodorou, P. Pastor, and S. Schaal, “STOMP: Stochastic trajectory optimization for motion planning,” in 2011 IEEE International Conference on Robotics and Automation. Shanghai, China: IEEE, 2011, pp. 4569–4574
2011
-
[13]
Distributed feedback optimisation for robotic coordination,
A. Terpin, S. Fricker, M. Perez, M. H. de Badyn, and F. Dörfler, “Distributed feedback optimisation for robotic coordination,” in2022 American Control Conference (ACC). IEEE, 2022, pp. 3710–3715
2022
-
[14]
Decentralized non- communicating multiagent collision avoidance with deep reinforce- ment learning,
Y . F. Chen, M. Liu, M. Everett, and J. P. How, “Decentralized non- communicating multiagent collision avoidance with deep reinforce- ment learning,” in2017 IEEE International Conference on Robotics and Automation (ICRA). Singapore: IEEE, 2017, pp. 285–292
2017
-
[15]
Neural graph control barrier functions guided distributed collision-avoidance multi-agent control,
S. Zhang, K. Garg, and C. Fan, “Neural graph control barrier functions guided distributed collision-avoidance multi-agent control,” inPro- ceedings of The 7th Conference on Robot Learning, ser. Proceedings of Machine Learning Research, vol. 229, 2023, pp. 2373–2392
2023
-
[16]
OSQP: an operator splitting solver for quadratic programs,
B. Stellato, G. Banjac, P. Goulart, A. Bemporad, and S. Boyd, “OSQP: an operator splitting solver for quadratic programs,”Mathematical Programming Computation, vol. 12, no. 4, pp. 637–672, Dec. 2020
2020
-
[17]
Results and problems in the theory of doubly-stochastic matrices,
L. Mirsky, “Results and problems in the theory of doubly-stochastic matrices,”Zeitschrift für Wahrscheinlichkeitstheorie und verwandte Gebiete, vol. 1, no. 4, pp. 319–334, 1963
1963
-
[18]
Dynamic Programming in Probability Spaces via Optimal Transport,
A. Terpin, N. Lanzetti, and F. Dörfler, “Dynamic Programming in Probability Spaces via Optimal Transport,”SIAM Journal on Control and Optimization, vol. 62, no. 2, pp. 1183–1206, 2024
2024
-
[19]
The hungarian method for the assignment problem,
H. W. Kuhn, “The hungarian method for the assignment problem,” Naval research logistics quarterly, vol. 2, no. 1-2, pp. 83–97, 1955
1955
-
[20]
Multidimensional binary search trees used for asso- ciative searching,
J. L. Bentley, “Multidimensional binary search trees used for asso- ciative searching,”Communications of the ACM, vol. 18, no. 9, pp. 509–517, 1975
1975
-
[21]
T. H. Cormen, C. E. Leiserson, R. L. Rivest, and C. Stein,Introduction to algorithms. MIT press, 2022
2022
-
[22]
Convex optimization for trajectory generation: A tutorial on generating dynamically feasible trajectories reliably and efficiently,
D. Malyuta, T. P. Reynolds, M. Szmuk, T. Lew, R. Bonalli, M. Pavone, and B. Açıkme¸ se, “Convex optimization for trajectory generation: A tutorial on generating dynamically feasible trajectories reliably and efficiently,”IEEE Control Systems Magazine, vol. 42, no. 5, pp. 40– 113, 2022
2022
-
[23]
Pinet: Optimizing hard-constrained neural networks with orthogonal projection layers,
P. D. Grontas, A. Terpin, E. C. Balta, R. D’Andrea, and J. Lygeros, “Pinet: Optimizing hard-constrained neural networks with orthogonal projection layers,” inThe Fourteenth International Conference on Learning Representations, 2026
2026
-
[24]
Variational analysis in the wasserstein space,
N. Lanzetti, A. Terpin, and F. Dörfler, “Variational analysis in the wasserstein space,”arXiv preprint arXiv:2406.10676, 2024
-
[25]
Deep reinforcement learning from human preferences,
P. F. Christiano, J. Leike, T. Brown, M. Martic, S. Legg, and D. Amodei, “Deep reinforcement learning from human preferences,” Advances in neural information processing systems, vol. 30, 2017. Example 1:N= 500, K= 1000, from "W ATER" to "W AY" Example 2:N= 500, K= 1000, from "of" to star Example 3: The Lake Zürich demonstration Example 4: The Time Space E...
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.