Continuous Time Identification of Linear Systems: Extended Version
Pith reviewed 2026-06-27 12:18 UTC · model grok-4.3
The pith
Overparameterized models allow continuous-time adaptive observers to identify linear system parameters despite order mismatch between plant and observer.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
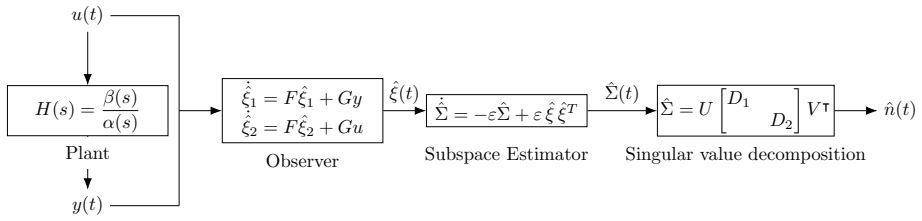
The framework uses an overparameterized input-output equivalent model that provides a suitable parameterization in the overmodeled case. Combined with a discrete algorithm that orchestrates successive experiments to incrementally learn the unknown plant order and a standard continuous-time parameter adaptation law, the approach identifies the system even when orders do not match, with theoretical extensions addressing the undermodeled case as well.
What carries the argument
The overparameterized model, defined as an input-output equivalent model that supplies a suitable parameterization for the overmodeled case.
If this is right
- System parameters converge despite order mismatch between plant and observer.
- Model order is learned incrementally through a sequence of experiments.
- The same structure extends to both overmodeled and undermodeled observer cases.
- All computations remain in continuous time without requiring neural network substrates.
Where Pith is reading between the lines
- The separation of discrete order selection from continuous parameter adaptation may allow hybrid implementations in embedded systems.
- If similar overparameterized equivalents exist for other system classes, the approach could generalize beyond linear time-invariant plants.
- Real-time applications that prohibit sampling, such as certain analog circuits, become feasible identification targets.
Load-bearing premise
A discrete algorithm can reliably orchestrate successive experiments to incrementally learn the unknown plant order while a continuous-time parameter adaptation law converges on the correct parameters despite possible order mismatch.
What would settle it
A simulation in which the continuous-time adaptation law fails to converge to the true parameters when the observer order differs from the plant order, even after the discrete algorithm has selected an order.
Figures
read the original abstract
We consider a problem to develop a framework for model identification adhering to the tenets of neuromorphic computation, without resorting to neural networks as the mathematical substrate. In particular, all computations take place in continuous time. We are naturally led to adaptive observers, where the main technical obstacle is the possible mismatch between the unknown plant order and the observer order. The key concept that informs the proposed framework is an overparameterized model, an input-output equivalent model that provides a suitable parameterization in the overmodeled case, with theoretical extensions also addressing the undermodeled case. A discrete algorithm orchestrates successive experiments to incrementally learn the model order, while a standard parameter adaptation law learns the parameters.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a continuous-time framework for identifying linear systems via adaptive observers. The central technical device is an overparameterized input-output equivalent model that supplies a suitable parameterization when the observer order exceeds the unknown plant order; theoretical extensions are claimed to cover the undermodeled case as well. A discrete algorithm runs successive experiments to learn the plant order incrementally while a standard continuous-time parameter adaptation law estimates the coefficients.
Significance. If the stated convergence results under order mismatch are correct, the work supplies a neuromorphic-style, fully continuous-time identification method that avoids neural-network substrates and extends classical adaptive-observer theory to both over- and under-modeled regimes. The hybrid discrete/continuous architecture and the explicit handling of order selection are the main contributions.
major comments (2)
- [§4.3, Theorem 2] §4.3, Theorem 2: the proof that the continuous-time adaptation law converges when the discrete order-selection algorithm has not yet settled on the correct order relies on a persistence-of-excitation condition that is stated only for the final order; it is not shown that the condition remains satisfied during the transient experiments.
- [§3.2, Eq. (17)] §3.2, Eq. (17): the claimed input-output equivalence of the overparameterized model is derived under the assumption that the plant is strictly proper; the extension to proper plants (mentioned in Remark 3) is only sketched and does not verify that the extra direct-feedthrough term remains identifiable by the adaptation law.
minor comments (2)
- The notation distinguishing the overparameterized regressor from the minimal-order regressor is introduced only in §3; moving the definition to §2 would improve readability.
- Figure 2 caption does not state the numerical values of the adaptation gain and the discrete switching threshold used in the simulation.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments on our manuscript. We address each major comment below and indicate the revisions we will incorporate.
read point-by-point responses
-
Referee: [§4.3, Theorem 2] the proof that the continuous-time adaptation law converges when the discrete order-selection algorithm has not yet settled on the correct order relies on a persistence-of-excitation condition that is stated only for the final order; it is not shown that the condition remains satisfied during the transient experiments.
Authors: We acknowledge that the persistence-of-excitation condition in Theorem 2 is formulated explicitly for the final settled order. The discrete algorithm performs successive experiments with inputs chosen to be rich enough for the current observer order. In the revised version we will insert a supporting lemma establishing that the same richness condition is inherited by each transient experiment, because the input design is independent of the instantaneous order mismatch and the regressor structure remains full rank at every finite order. This will close the gap in the convergence argument during the order-learning phase. revision: yes
-
Referee: [§3.2, Eq. (17)] the claimed input-output equivalence of the overparameterized model is derived under the assumption that the plant is strictly proper; the extension to proper plants (mentioned in Remark 3) is only sketched and does not verify that the extra direct-feedthrough term remains identifiable by the adaptation law.
Authors: The main derivation in §3.2 assumes strict properness. Remark 3 sketches the proper-plant case by adjoining a direct-feedthrough coefficient. We agree that identifiability of this extra term requires explicit verification. The revision will expand Remark 3 to show that the direct term enters the parameter vector linearly and that the augmented regressor remains persistently exciting under the same conditions used for the strictly proper case, thereby confirming that the standard adaptation law continues to identify all coefficients. revision: yes
Circularity Check
No significant circularity identified
full rationale
The abstract and description rely on standard adaptive-observer techniques and an overparameterized input-output equivalent model without presenting equations, fitted parameters, or self-citations that reduce the claimed results to inputs by construction. No load-bearing steps match the enumerated circularity patterns; the framework is presented as building on external standard methods for continuous-time identification.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Linear plants admit input-output equivalent overparameterized models that remain useful under order mismatch.
invented entities (1)
-
overparameterized model
no independent evidence
Reference graph
Works this paper leans on
-
[1]
C. Afri, V. Andrieu, L. Bako, and P. Dufour. State and parameter estimation: A nonlinear 18 Luenberger observer approach. IEEE Trans Au- tomatic Control , 62(2):973–980, 2017
2017
-
[2]
C. Afri, L. Bako, V. Andrieu, and P. Dufour. Adaptive identification of continuous-time mimo state-space models. In IEEE Conference on De- cision and Control , pages 5677–5682, 2015
2015
-
[3]
Baldi and K
P. Baldi and K. Hornik. Neural networks and principal component analysis: Learning from ex- amples without local minima. Neural Networks , 2:53–58, 1989
1989
-
[4]
S. Barnett. Polynomials and Linear Control Sys- tems, volume 77 of Monographs and Textbooks in Pure and Applied Mathematics . Marcel Dekker, New York, 1983
1983
-
[5]
Bastogne, H
T. Bastogne, H. Garnier, P. Sibille, and M. Mensler. PMF-based subspace method for continuous-time model identification determinis- tic study. In IF AC Symposium on System Iden- tification (SYSID’97), 1997
1997
-
[6]
D. Bauer. Order estimation for subspace meth- ods. Automatica, 37:1561–1573, 10 2001
2001
-
[7]
Burghi and R
T. Burghi and R. Sepulchre. Adaptive observers for biophysical neuronal circuits. IEEE Trans- actions on Automatic Control , 69(8):5020–5033, 2024
2024
-
[8]
A. Carè, B. Csáji, M. Campi, and E. Weyer. Finite-sample system identification: An overview and a new correlation method. IEEE Control Systems Letters , 2(1):61–66, 2018
2018
-
[9]
Chowdhary and E
G. Chowdhary and E. Johnson. A singular value maximizing data recording algorithm for concur- rent learning. In American Control Conference, pages 3547–3552, 2011
2011
-
[10]
Dayan and L
P. Dayan and L. Abbott. Theoretical Neuro- science: Computational and Mathematical Mod- eling of Neural Systems . The MIT Press, Cam- bridge, 2001
2001
-
[11]
P. Dean, J. Porrill, C.-F. Ekerot, and H. Jorntell. The cerebellar microcircuit as an adaptive filter: experimental and computational evidence. Na- ture Reviews: Neuroscience , 11:30–45, 1 2010
2010
-
[12]
Farza, M
M. Farza, M. M’Saad, T. Maatoug, and M. Kamoun. Adaptive observers for nonlinearly parameterized class of nonlinear systems. Auto- matica, 45(10):2292–2299, 2009
2009
-
[13]
M. Fujita. Adaptive filter model of the cerebel- lum. Biological Cybernetics, 45:195–206, 1982
1982
-
[14]
H. Garnier. Direct continuous-time approaches to system identification. overview and benefits for practical applications. European Journal of Control, 24:50–62, 2015
2015
-
[15]
Garnier, M
H. Garnier, M. Mensler, and A. Richard. Continuous-time model identification from sam- pled data: Implementation issues and perfor- mance evaluation. International Journal of Con- trol, 76(13):1337–1357, 2003
2003
-
[16]
Garnier and L
H. Garnier and L. Wang. Identification of Continuous-time Models from Sampled Data . Springer London, 2008
2008
-
[17]
Golub, V
G. Golub, V. Klema, and S. C. Peters. Rules and software for detecting rank degeneracy. Journal of Econometrics , 12(1):41–48, 1980
1980
-
[18]
Gonzales, C.R
R. Gonzales, C.R. Rojas, S. Pan, and J. Welsh. Consistent identification of continuous-time sys- tems under multisine input signal excitation. Au- tomatica, 133:109859, 2021
2021
-
[19]
Elliott. H. and W.A. Wolovich. A frequency do- main model reduction procedure. Automatica, 16(2):167–178, 1980
1980
-
[20]
J. K. Hale. Ordinary Differential Equations, 2nd Ed. Kreiger Publishing Company, 1980
1980
-
[21]
Haverkamp, C.T
B.R.J. Haverkamp, C.T. Chou, M.H. Verhaegen, and R. Johansson. Identification of continuous- time mimo state space models from sampled data, in the presence of process and measure- ment noise. In IEEE Conference on Decision and Control , volume 2, pages 1539–1544 vol.2, 1996
1996
-
[22]
Ho and R.E
B. Ho and R.E. Kalman. Effective construc- tion of linear state-variable models from in- put/output functions. Regelungstechnik, 14:545– 548, 1966
1966
-
[23]
C. Huang. A combined invariant-subspace and subspace identification method for continuous- time state–space models using slowly sampled multi-sine-wave data. Automatica, 140:110261, 2022
2022
-
[24]
Huang, G
C. Huang, G. Feng, H. Zhang, and Z. Wang. System identification based on invariant sub- space. IEEE Transactions on Automatic Con- trol, 67(3):1327–1341, 2022
2022
-
[25]
Ioannou and J
P.A. Ioannou and J. Sun. Robust Adaptive Con- trol. Dover Publications, 2012. 19
2012
-
[26]
Johansson, M
R. Johansson, M. Verhaegen, and C. Chou. Stochastic theory of continuoue time state- space. IEEE Transactions on Signal Processing , 1999
1999
-
[27]
T. Kailath. Linear Systems. Prentice-Hall, Inc., 1980
1980
-
[28]
Katayama
T. Katayama. Subspace Methods for System Identification. Communications and Control En- gineering. Springer London, 2005
2005
-
[29]
H. Khalil. Nonlinear Systems . Prentice-Hall, Third edition, 2002
2002
-
[30]
Kiebel, Jean Daunizeau, and Karl J
Stefan J. Kiebel, Jean Daunizeau, and Karl J. Friston. A hierarchy of time-scales and the brain. PLOS Computational Biology , 4(11):1–12, 11 2008
2008
-
[31]
Kreisselmeier
G. Kreisselmeier. Adaptive observers with expo- nential rate of convergence. IEEE Transactions on Automatic Control , 22(1):2–8, 1977
1977
-
[32]
Kreisselmeier
G. Kreisselmeier. Parameter adaptive control: a solution to the overmodeling problem. IEEE Transactions on Automatic Control. , 39:1819– 1826, 1994
1994
-
[33]
Kreisselmeier and R
G. Kreisselmeier and R. Lozano. Adap- tive control of continuous-time overmodeled plants. IEEE Transactions on Automatic Con- trol, 41(12):1779–1794, 1996
1996
-
[34]
Krstic, I
M. Krstic, I. Kanellakopoulos, and P. Kokotovic. Nonlinear and Adaptive Control Design . Wiley- Interscience, 1995
1995
-
[35]
Lai and D
B. Lai and D. Bernstein. Convergence of re- cursive least squares based input/output sys- tem identification with model order mismatch. In IEEE Conference on Decision and Control , 2024
2024
-
[36]
L. Ljung. System Identification: Theory for the User. Prentice Hall information and system sci- ences series. Prentice Hall PTR, 1999
1999
-
[37]
L. Ljung. Prediction error estimation methods. Circuits Systems and Signal Process , 2002
2002
-
[38]
Marino and P
R. Marino and P. Tomei. On exponentially con- vergent parameter estimation with lack of persis- tency of excitation. Systems & Control Letters , 159:105080, 2022
2022
-
[39]
Mejia Uzeda and M.E
E. Mejia Uzeda and M.E. Broucke. Estimation of persistently exciting subspaces for robust pa- rameter adaptation. IEEE Transactions on Au- tomatic Control , 70(3):1777–1792, 2025
2025
-
[40]
Mejia Uzeda, M
E. Mejia Uzeda, M. Hafez, and M.E. Broucke. Learning and forgetting in systems neuroscience: A control perspective. Annual Reviews in Con- trol, 56:100912, 11 2023
2023
-
[41]
Moonen, B
M. Moonen, B. De Moor, L. Vandenberghe, and J. Vandewalle. On- and off-line identification of linear state space models. International Journal of Control , 49(1):219–232, 1989
1989
-
[42]
Narendra and A
K. Narendra and A. Annaswamy. Stable adaptive systems. Dover Publications, 1989
1989
-
[43]
Newell and David E
Karl M. Newell and David E. Vaillancourt. Di- mensional change in motor learning. Human Movement Science , 20(4):695–715, 2001
2001
-
[44]
E. Oja. A simplified neuron model as a principle component analyzer. J. Math. Biology , 15:267– 273, 1982
1982
-
[45]
Pintelon and J
R. Pintelon and J. Schoukens. System Identifica- tion: A Frequency Domain Approach . MATLAB examples. Wiley, 2012
2012
-
[46]
Pyrkin, A
A. Pyrkin, A. Bobtsov, R. Ortega, and A. Isidori. An adaptive observer for uncertain linear time-varying systems with unknown ad- ditive perturbations. Automatica, 147:110677, 2023
2023
-
[47]
Sarkar, A
T. Sarkar, A. Rakhlin, and M.A. Dahleh. Fi- nite time LTI system identification. Journal of Machine Learning Research, 22(26):1–61, 2021
2021
-
[48]
Sastry and M
S. Sastry and M. Bodson. Adaptive control: Sta- bility, Convergence, and Robustness . Prentice- Hall, 1989
1989
-
[49]
Schoukens, T
J. Schoukens, T. Dobrowiecki, and R. Pin- telon. Parametric and nonparametric identifica- tion of linear systems in the presence of nonlinear distortions-a frequency domain approach. IEEE Transactions on Automatic Control , 43(2):176– 190, 1998
1998
-
[50]
Soderstrom and P
T. Soderstrom and P. Stoica. System Identifica- tion. Prentice-Hall, 1989
1989
-
[51]
G. W. Stewart. Rank degeneracy. SIAM Journal on Scientific and Statistical Computing , 5(2):403–413, 1984
1984
-
[52]
How synchronization pro- tects from noise
Nicolas Tabareau, Jean-Jacques Slotine, and Quang-Cuong Pham. How synchronization pro- tects from noise. PLOS Computational Biology , 6(1):1–9, 01 2010. 20
2010
-
[53]
Tomei and R
P. Tomei and R. Marino. An enhanced feedback adaptive observer for nonlinear systems with lack of persistency of excitation. IEEE Trans- actions on Automatic Control , 68(8):5067–5072, 2023
2023
-
[54]
I. Y. Tyukin, E. Steur, H. Nijmeijer, and C. van Leeuwen. Adaptive observers and parameter es- timation for a class of systems nonlinear in the parameters. Automatica, 49(8):2409–2423, 2013
2013
-
[55]
Van Overschee and B
P. Van Overschee and B. De Moor. Continuous- time frequency domain subspace system identi- fication. Signal Processing, 52(2):179–194, 1996
1996
-
[56]
Van Overschee and B
P. Van Overschee and B. De Moor. Subspace Identification for Linear Systems . Kluwer Aca- demic Pub., 1996
1996
-
[57]
H. J. van Waarde, M. K. Camlibel, and H. L. Trentelman. Data-based Linear Systems and Control Theory. Kindle Direct Publishing, 1 edi- tion, 2025
2025
-
[58]
Verhaegen and V
M. Verhaegen and V. Verdult. Filtering and Sys- tem Identification: A Least Squares Approach . Cambridge University Press, 2007
2007
-
[59]
Vidyasagar
M. Vidyasagar. A theory of learning and gener- alization : with applications to neural networks and control systems . Communications and con- trol engineering. Springer, London, 1997
1997
-
[60]
Helmke, and J.B
Wei-Yong Yan, U. Helmke, and J.B. Moore. Global analysis of Oja’s flow for neural net- works. IEEE Transactions on Neural Networks , 5(5):674–683, 1994. 21
1994
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.