Local Fault Repair of Perfect Resource Placements in Eisenstein--Jacobi Networks
Pith reviewed 2026-06-27 02:39 UTC · model grok-4.3
The pith
In Eisenstein-Jacobi networks, two replacements always suffice to repair one failed resource in a perfect placement, and the minimum overlap among such repairs equals exactly t squared.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
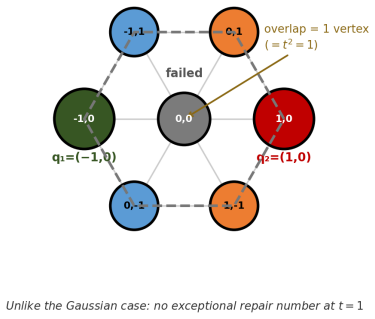
Perfect resource placements in dense Eisenstein--Jacobi (EJ) networks partition the network into hexagonal radius-t service cells. For one failed resource, one replacement cannot cover the failed hexagon and two always suffice, giving ρ_EJ(t)=2 for all t≥1. Among minimum-size repairs, the sharp minimum-overlap formula Ω_EJ(t)=t² follows from the three-strip geometry of EJ balls. For two failed resources, independent repair gives a four-replacement upper bound, but unlike the Gaussian case EJ repair is not always additive: two infinite neighboring displacement families admit three-replacement repairs, proved optimal by a two-ball impossibility argument. For q failed resources, independent can
What carries the argument
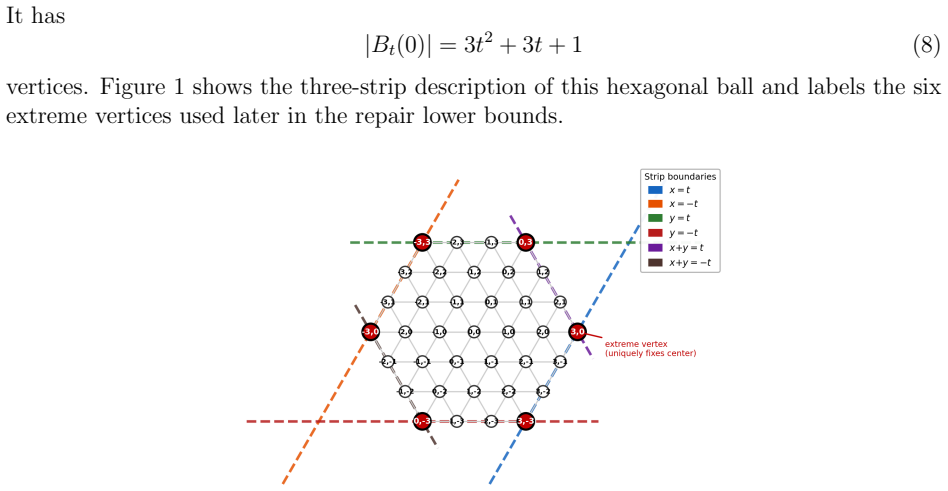
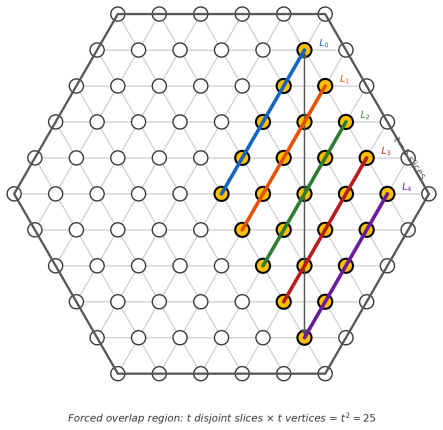
The three-strip geometry of EJ balls, which determines both the impossibility of single-replacement coverage and the exact overlap count t² in minimum repairs of failed hexagonal cells.
Load-bearing premise
The three-strip geometry of EJ balls together with the assumption that perfect placements partition the network into non-overlapping hexagonal radius-t service cells.
What would settle it
An explicit failed hexagon whose coverage requires only one replacement ball, or a minimum-size two-replacement repair whose overlap differs from t squared.
Figures

read the original abstract
Perfect resource placements in dense Eisenstein--Jacobi (EJ) networks partition the network into hexagonal radius-$t$ service cells. This paper studies local repair of such placements after resource failures. For one failed resource, we prove that one replacement cannot cover the failed hexagon and two always suffice, giving $\rho_{\mathrm{EJ}}(t)=2$ for all $t\ge1$. Among minimum-size repairs, the sharp minimum-overlap formula $\Omega_{\mathrm{EJ}}(t)=t^2$ follows from the three-strip geometry of EJ balls. For two failed resources, independent repair gives a four-replacement upper bound, but unlike the Gaussian case EJ repair is not always additive: two infinite neighboring displacement families admit three-replacement repairs, proved optimal by a two-ball impossibility argument. Additive behavior is established algebraically via endpoint-rigidity and diagonal-corridor theorems. For $q$ failed resources, independent canonical repair gives a universal $2q$ upper bound, exact when failed cells are pairwise more than $4t$ apart. Dense cluster subadditivity is proved for infinite four-fault and six-fault families with exact repair numbers four and five, giving savings of four and seven over independent repair. An exact inclusion--exclusion identity governs repeated coverage for arbitrary multi-fault repairs. An audit over 19,400 instances confirms widespread subadditivity. EJ local repair is structurally distinct from the Gaussian case: the one-fault overlap is quadratic, two-fault repair can be non-additive, and clustered repairs reuse replacement balls across multiple failed cells.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript studies local repair of perfect resource placements in Eisenstein-Jacobi (EJ) networks. It proves that for a single resource failure, one replacement is insufficient while two suffice, establishing ρ_EJ(t)=2 for all t≥1. The minimum overlap among such repairs is Ω_EJ(t)=t², derived from the three-strip geometry of EJ balls. For two failures, some cases allow three-replacement repairs (non-additive), shown optimal by two-ball impossibility. For q failures, a 2q upper bound holds, with exactness when cells are sufficiently separated, and subadditivity for certain dense clusters (e.g., four and six faults requiring 4 and 5 replacements). An inclusion-exclusion identity for repeated coverage is given, and a 19,400-instance audit confirms subadditivity. The work highlights distinctions from the Gaussian case.
Significance. If the geometric and algebraic arguments hold, the results offer precise, parameter-free repair metrics for EJ networks, including sharp bounds and subadditivity savings. The 19,400-instance audit provides substantial empirical validation for the multi-fault claims. The exact formulas and proofs of non-additivity represent a clear advance in understanding fault tolerance in these networks.
major comments (2)
- [one-fault repair (abstract and § on single failure)] The one-fault claims (ρ_EJ(t)=2 and Ω_EJ(t)=t²) rest on the three-strip geometry of EJ balls and the assumption that perfect placements partition the network into non-overlapping hexagonal radius-t cells. These geometric assertions are invoked in the abstract and one-fault arguments but not exhibited via explicit decomposition or intersection cardinality calculations; this is load-bearing for both the impossibility of one replacement and the exact quadratic overlap.
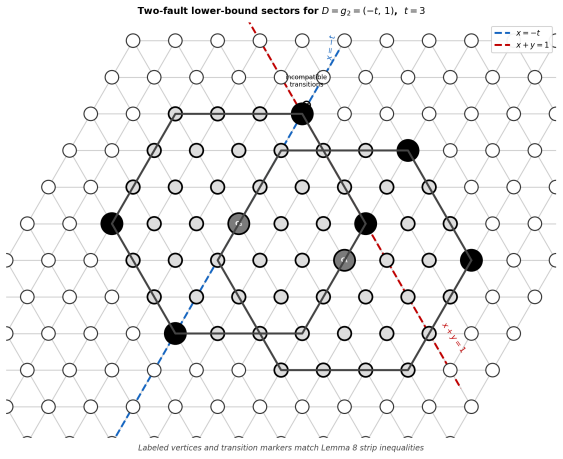
- [two-fault repair section] The two-ball impossibility argument establishing optimality of three-replacement repairs for neighboring infinite displacement families relies on specific EJ-metric distances; without the explicit distance computations or ball-intersection details, the non-additivity claim cannot be independently verified.
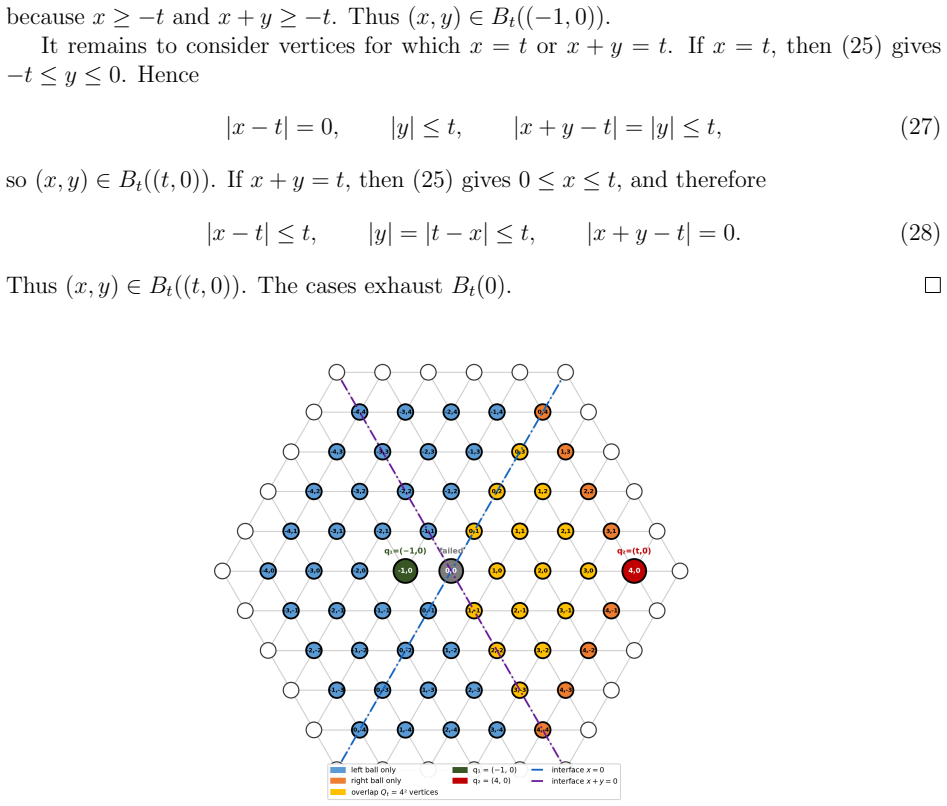
minor comments (1)
- [audit paragraph] The 19,400-instance audit is cited as confirmation but the instance generation method, parameter ranges for t, or verification code are not referenced, limiting reproducibility.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive review of our manuscript. The major comments identify areas where the geometric arguments could be presented with greater explicitness. We address each point below and have made revisions to incorporate additional details and calculations as suggested.
read point-by-point responses
-
Referee: The one-fault claims (ρ_EJ(t)=2 and Ω_EJ(t)=t²) rest on the three-strip geometry of EJ balls and the assumption that perfect placements partition the network into non-overlapping hexagonal radius-t cells. These geometric assertions are invoked in the abstract and one-fault arguments but not exhibited via explicit decomposition or intersection cardinality calculations; this is load-bearing for both the impossibility of one replacement and the exact quadratic overlap.
Authors: We agree that the one-fault results depend critically on the three-strip geometry of EJ balls and the partitioning into hexagonal cells. Although the manuscript states the proofs, we acknowledge that more explicit step-by-step calculations would aid verification. In the revised version, we have added a new subsection detailing the decomposition of the EJ ball into three strips, including explicit formulas for the intersection cardinalities. This demonstrates why a single replacement cannot suffice and establishes the minimum overlap as exactly t². A supporting figure has also been included to illustrate the geometry. revision: yes
-
Referee: The two-ball impossibility argument establishing optimality of three-replacement repairs for neighboring infinite displacement families relies on specific EJ-metric distances; without the explicit distance computations or ball-intersection details, the non-additivity claim cannot be independently verified.
Authors: The referee is correct that the optimality of the three-replacement repairs hinges on the two-ball impossibility, which in turn requires the specific distance computations. We have expanded the two-fault repair section to include the full details of the EJ-metric distances between the relevant points and the complete ball-intersection analysis. These additions make the argument self-contained and independently verifiable. revision: yes
Circularity Check
No significant circularity; derivations rest on independent geometric and algebraic properties
full rationale
The paper derives ρ_EJ(t)=2 and Ω_EJ(t)=t² from the three-strip geometry of EJ balls and the non-overlapping hexagonal partition of perfect placements. These are presented as foundational geometric facts used in the proofs, not as quantities fitted to the target results or defined in terms of them. No self-citations appear in the provided text, and the claims do not reduce by construction to inputs (e.g., no parameter fitted to a subset then renamed as prediction, no ansatz smuggled via prior work by the same authors). The derivation chain is self-contained via stated algebraic theorems and geometry without load-bearing loops. This matches the default case of an honest non-finding.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Perfect resource placements partition EJ networks into non-overlapping hexagonal radius-t service cells whose coverage balls have three-strip geometry.
Reference graph
Works this paper leans on
-
[1]
On resource placement in Gaussian and EJ interconnection networks,
M. Flahive and B. Bose, “On resource placement in Gaussian and EJ interconnection networks,”IEEE Transactions on Computers, vol. 62, no. 3, pp. 623–626, Mar. 2013
2013
-
[2]
The topology of Gaussian and Eisenstein–Jacobi interconnec- tion networks,
M. Flahive and B. Bose, “The topology of Gaussian and Eisenstein–Jacobi interconnec- tion networks,”IEEE Transactions on Parallel and Distributed Systems, vol. 21, no. 8, pp. 1132–1142, Aug. 2010
2010
-
[3]
Modeling hexagonal constel- lations with Eisenstein–Jacobi graphs,
C. Mart´ ınez, E. Stafford, R. Beivide, and E. M. Gabidulin, “Modeling hexagonal constel- lations with Eisenstein–Jacobi graphs,”Problems of Information Transmission, vol. 44, no. 1, pp. 1–11, 2008
2008
-
[4]
Resource placement in torus-based networks,
M. M. Bae and B. Bose, “Resource placement in torus-based networks,”IEEE Trans- actions on Computers, vol. 46, no. 10, pp. 1083–1092, Oct. 1997
1997
-
[5]
Resource placement with multiple adjacency con- straints ink-aryn-cubes,
P. Ramanathan and S. Chalasani, “Resource placement with multiple adjacency con- straints ink-aryn-cubes,”IEEE Transactions on Parallel and Distributed Systems, vol. 6, no. 5, pp. 511–519, May 1995
1995
-
[6]
Resource allocation in cube network systems based on the covering radius,
N.-F. Tzeng and G.-L. Feng, “Resource allocation in cube network systems based on the covering radius,”IEEE Transactions on Parallel and Distributed Systems, vol. 7, no. 4, pp. 328–342, Apr. 1996. 31
1996
-
[7]
Perfect dominating sets,
M. Livingston and Q. F. Stout, “Perfect dominating sets,” inProceedings of the Twenty- First Southeastern International Conference on Combinatorics, Graph Theory, and Computing, Congressus Numerantium, vol. 79, pp. 187–203, 1990
1990
-
[8]
A taxonomy of perfect domination,
W. F. Klostermeyer, “A taxonomy of perfect domination,”Journal of Discrete Mathe- matical Sciences and Cryptography, vol. 18, nos. 1–2, pp. 105–116, 2015
2015
-
[9]
Independent domination in graphs: A survey and recent results,
W. Goddard and M. A. Henning, “Independent domination in graphs: A survey and recent results,”Discrete Mathematics, vol. 313, no. 7, pp. 839–854, 2013
2013
-
[10]
Twin vertices in fault- tolerant metric sets and fault-tolerant metric dimension of multistage interconnection networks,
S. Prabhu, V. Manimozhi, M. Arulperumjothi, and S. Klavˇ zar, “Twin vertices in fault- tolerant metric sets and fault-tolerant metric dimension of multistage interconnection networks,”Applied Mathematics and Computation, vol. 420, Art. 126897, May 2022
2022
-
[11]
A general approach to deriving diagnosability results of interconnection networks,
E. Cheng, Y. Mao, K. Qiu, and Z. Shen, “A general approach to deriving diagnosability results of interconnection networks,”Journal of Interconnection Networks, vol. 22, no. 3, Art. 2250011, 2022
2022
-
[12]
Bound for thek-fault-tolerant power-domination number,
L. Girish and K. Somasundaram, “Bound for thek-fault-tolerant power-domination number,”Symmetry, vol. 16, no. 7, Art. 781, 2024
2024
-
[13]
Frobenius circulant graphs of valency six, Eisenstein–Jacobi networks, and hexagonal meshes,
A. Thomson and S. Zhou, “Frobenius circulant graphs of valency six, Eisenstein–Jacobi networks, and hexagonal meshes,”Journal of Algebraic Combinatorics, vol. 38, pp. 273– 300, 2013
2013
-
[14]
Efficient communication algorithms in hexag- onal mesh interconnection networks,
B. Albader, B. Bose, and M. Flahive, “Efficient communication algorithms in hexag- onal mesh interconnection networks,”IEEE Transactions on Parallel and Distributed Systems, vol. 23, no. 1, pp. 69–77, Jan. 2012. 32
2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.