SCAN-Planner: Spatial Collision-Aware Local Planning for Route-Guided Long-Range Quadruped Navigation
Pith reviewed 2026-06-26 20:36 UTC · model grok-4.3
The pith
A yaw-aware twin-cylinder model lets quadruped robots check whole-body collisions in 3D maps for safer local planning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
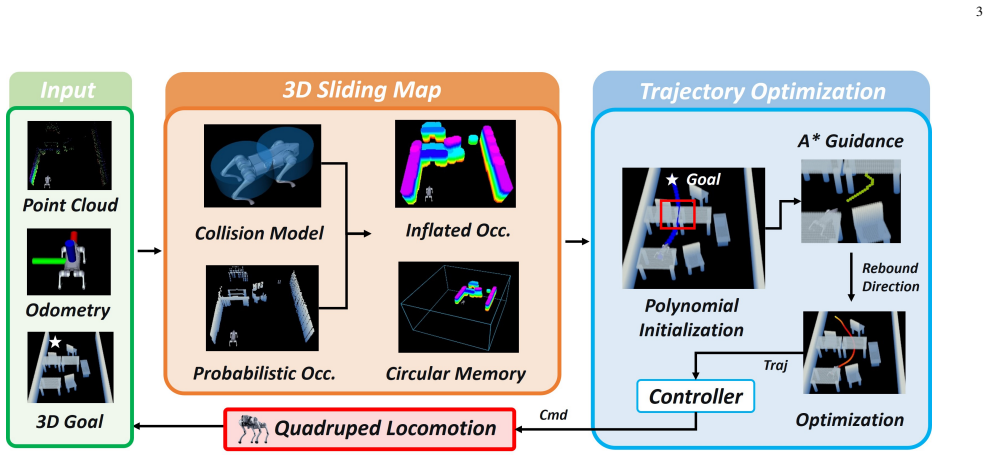
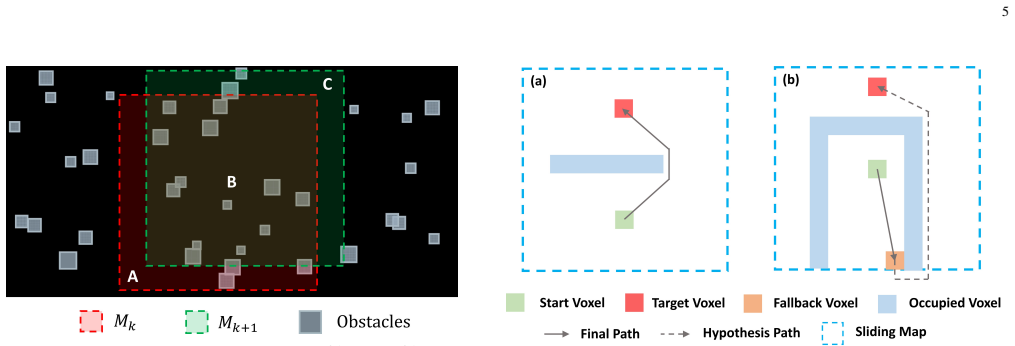
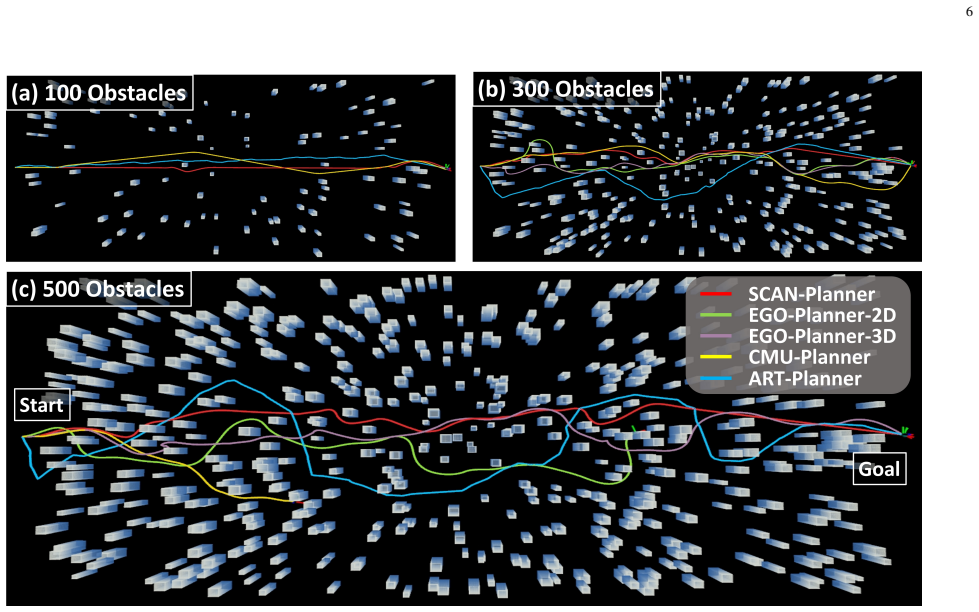
SCAN-Planner generates safe, smooth, and efficient trajectories in dense clutter, 3D unstructured scenes, stair traversal, and long-range navigation tasks by using a yaw-aware twin-cylinder footprint for whole-body collision evaluation via sparse queries in an inflated 3D occupancy map, a projected A* search on a ground-following surface with z-gradient suppression, and a robot-centric sliding map with boundary fallback for recovery from dead ends.
What carries the argument
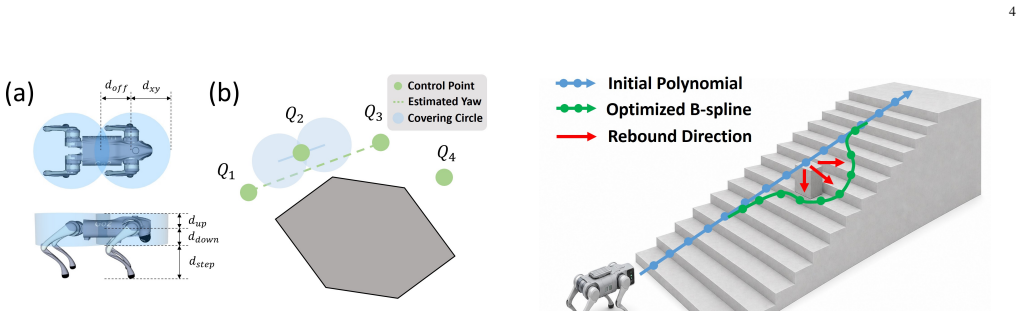
The yaw-aware twin-cylinder footprint, which models the elongated robot body to enable whole-body collision evaluation through sparse queries in an inflated 3D occupancy map.
If this is right
- Quadrupeds can move through narrow passages and cluttered indoor scenes with less conservative paths than isotropic inflation methods.
- The planner reasons about overhanging structures that planar or elevation-map approaches ignore.
- Stair traversal and long-range navigation become feasible without getting stuck in local dead ends.
- High-resolution local collision checking remains available even as the robot travels over large areas.
Where Pith is reading between the lines
- The same footprint and query approach could apply to other elongated mobile robots that need fast 3D collision checks.
- Higher planning rates become possible because only sparse queries are used instead of dense mesh checks.
- Combining the local planner with existing global route planners could produce fully autonomous missions in large buildings or outdoor sites.
- The sliding map mechanism might help other planners recover when global routes temporarily conflict with local obstacles.
Load-bearing premise
Sparse queries on the inflated 3D map with the twin-cylinder model are enough to detect all critical contacts without missing collisions or requiring too much computation.
What would settle it
Execution of a planned trajectory that results in an undetected body or leg contact with an obstacle that the twin-cylinder queries missed.
Figures
read the original abstract
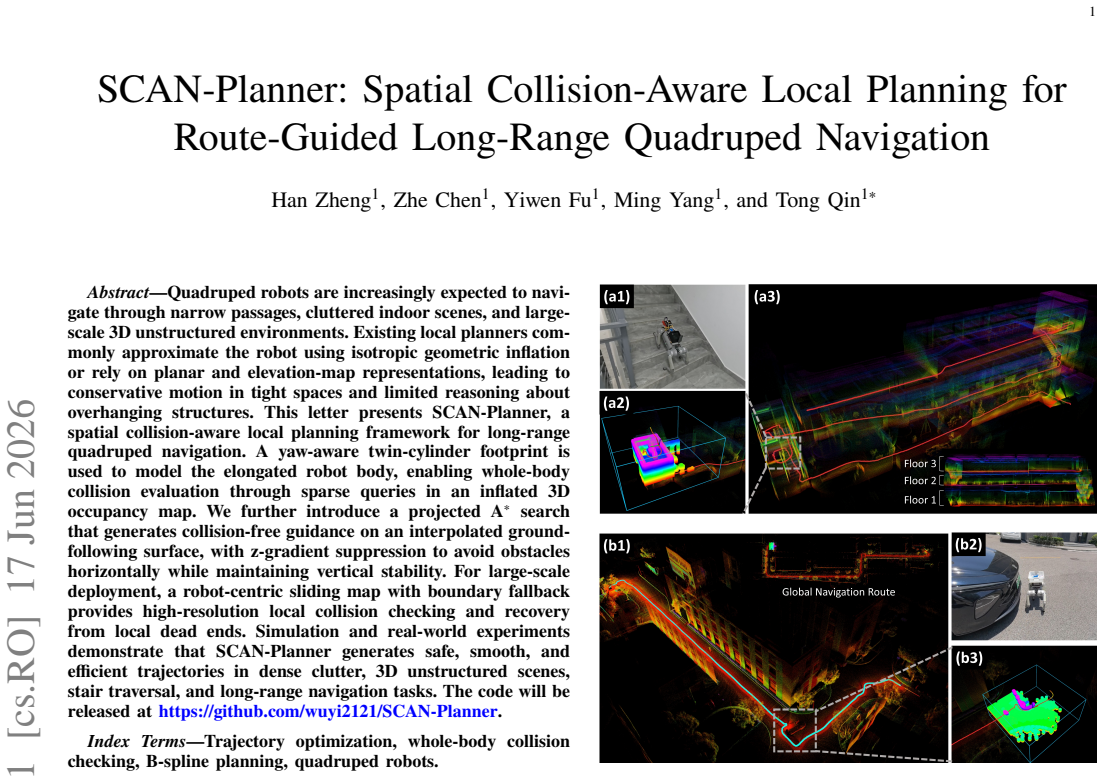
Quadruped robots are increasingly expected to navigate through narrow passages, cluttered indoor scenes, and large-scale 3D unstructured environments. Existing local planners commonly approximate the robot using isotropic geometric inflation or rely on planar and elevation-map representations, leading to conservative motion in tight spaces and limited reasoning about overhanging structures. This letter presents SCAN-Planner, a spatial collision-aware local planning framework for long-range quadruped navigation. A yaw-aware twin-cylinder footprint is used to model the elongated robot body, enabling whole-body collision evaluation through sparse queries in an inflated 3D occupancy map. We further introduce a projected A* search that generates collision-free guidance on an interpolated ground-following surface, with z-gradient suppression to avoid obstacles horizontally while maintaining vertical stability. For large-scale deployment, a robot-centric sliding map with boundary fallback provides high-resolution local collision checking and recovery from local dead ends. Simulation and real-world experiments demonstrate that SCAN-Planner generates safe, smooth, and efficient trajectories in dense clutter, 3D unstructured scenes, stair traversal, and long-range navigation tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents SCAN-Planner, a local planning framework for long-range quadruped navigation. It models the elongated robot body with a yaw-aware twin-cylinder footprint to perform whole-body collision evaluation via sparse queries against an inflated 3D occupancy map. A projected A* search generates guidance on an interpolated ground-following surface with z-gradient suppression, and a robot-centric sliding map with boundary fallback supports large-scale deployment and recovery. Simulation and real-world experiments are reported to produce safe, smooth, and efficient trajectories in dense clutter, 3D unstructured environments, stair traversal, and long-range tasks.
Significance. If the collision-checking assumptions hold, the method offers a practical advance over isotropic inflation or 2.5D representations by enabling tighter navigation around overhanging structures and elongated bodies while maintaining computational efficiency for long-range operation. The combination of 3D map queries, projected search, and sliding window is a concrete engineering contribution that could improve real-world quadruped deployment in complex indoor/outdoor settings.
major comments (1)
- [Method (collision-checking component)] Collision evaluation description (twin-cylinder + sparse queries in inflated 3D map): no derivation or empirical bound is given on the maximum missed-contact distance as a function of query spacing, inflation radius, or terrain slope. This assumption is load-bearing for the safety claims in stair traversal and 3D unstructured scenes; failure on narrow stairs or protruding obstacles would invalidate the reported experimental success.
minor comments (2)
- [Abstract] Abstract states experimental success but provides no quantitative metrics, error statistics, or baseline comparisons; these should be added to the abstract or early results section for clarity.
- [Method] Notation for the twin-cylinder parameters and query sampling density should be defined explicitly with symbols and values in a dedicated subsection or table.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. The single major comment is addressed below with a commitment to strengthen the safety analysis.
read point-by-point responses
-
Referee: [Method (collision-checking component)] Collision evaluation description (twin-cylinder + sparse queries in inflated 3D map): no derivation or empirical bound is given on the maximum missed-contact distance as a function of query spacing, inflation radius, or terrain slope. This assumption is load-bearing for the safety claims in stair traversal and 3D unstructured scenes; failure on narrow stairs or protruding obstacles would invalidate the reported experimental success.
Authors: We acknowledge that the original manuscript provides no formal derivation or empirical bound on maximum missed-contact distance. The twin-cylinder queries are performed at a fixed spacing inside an inflated map whose radius is set larger than the query interval plus robot velocity margin, but this relationship is stated only qualitatively. The stair and 3D experiments succeeded without observed collisions, yet this does not constitute a quantified bound across slopes or protrusion geometries. We will add a dedicated analysis subsection that (1) derives an upper bound on missed contact under the current query pattern and inflation, (2) reports empirical measurements of the bound on representative stair and overhang test cases, and (3) discusses sensitivity to terrain slope. These additions will be placed in Section III-B and supported by new supplementary figures. revision: yes
Circularity Check
No circularity: method components are independent design choices with no self-referential fitting or derivation
full rationale
The paper describes a planning framework using a yaw-aware twin-cylinder model, sparse queries on an inflated 3D map, projected A* on a ground surface, and sliding map, but presents no equations, fitted parameters, or predictions that reduce to inputs by construction. No self-citations are invoked as load-bearing uniqueness theorems, and the central claims rest on experimental validation rather than any closed-loop derivation. This is the common case of an engineering method whose assumptions are stated explicitly and tested externally.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
ArtPlanner: Robust legged robot navigation in the field,
L. Wellhausen and M. Hutter, “ArtPlanner: Robust legged robot navigation in the field,”Field Robotics, vol. 3, pp. 413–434, 2023
2023
-
[2]
SMUG planner: A safe multi-goal planner for mobile robots in challenging environments,
C. Chen, J. Frey, P. Arm, and M. Hutter, “SMUG planner: A safe multi-goal planner for mobile robots in challenging environments,”IEEE Robotics and Automation Letters, vol. 8, no. 11, pp. 7170–7177, 2023
2023
-
[3]
Perceptive locomotion through nonlinear model-predictive control,
R. Grandia, F. Jenelten, S. Yang, F. Farshidian, and M. Hutter, “Perceptive locomotion through nonlinear model-predictive control,”IEEE Transac- tions on Robotics, vol. 39, no. 5, pp. 3402–3421, 2023
2023
-
[4]
Ego-planner: An esdf-free gradient-based local planner for quadrotors,
X. Zhou, Z. Wang, H. Ye, C. Xu, and F. Gao, “Ego-planner: An esdf-free gradient-based local planner for quadrotors,”IEEE Robot. Autom. Lett., vol. 6, no. 2, pp. 478–485, 2021
2021
-
[5]
Robust and efficient quadrotor trajectory generation for fast autonomous flight,
B. Zhou, F. Gao, L. Wang, C. Liu, and S. Shen, “Robust and efficient quadrotor trajectory generation for fast autonomous flight,”IEEE Robot. Autom. Lett., vol. 4, no. 4, pp. 3529–3536, 2019
2019
-
[6]
FASTER: Fast and safe trajectory planner for navigation in unknown environments,
J. Tordesillas, B. T. Lopez, M. Everett, and J. P. How, “FASTER: Fast and safe trajectory planner for navigation in unknown environments,”IEEE Trans. Robot., vol. 38, no. 2, pp. 922–938, 2022
2022
-
[7]
Robo-centric esdf: A fast and accurate whole-body collision evaluation tool for any-shape robotic planning,
S. Geng, Q. Wang, L. Xie, C. Xu, Y. Cao, and F. Gao, “Robo-centric esdf: A fast and accurate whole-body collision evaluation tool for any-shape robotic planning,” inIROS. IEEE, 2023, pp. 290–297
2023
-
[8]
3D RoA-Planner: Path planner for quadruped robots in confined spaces using 3D rotatable areas,
Y. Son, H. Lee, H. Kang, J. Park, S. Nam, J. Oh, B. Yi, H. Yu, and H. R. Choi, “3D RoA-Planner: Path planner for quadruped robots in confined spaces using 3D rotatable areas,”IEEE Robotics and Automation Letters, vol. 11, no. 6, pp. 7436–7443, 2026
2026
-
[9]
Efficient trajectory generation based on traversable planes in 3D complex archi- tectural spaces,
M. Zhang, Z. Tian, Y. Xia, C. Xu, F. Gao, and Y. Cao, “Efficient trajectory generation based on traversable planes in 3D complex archi- tectural spaces,” in2025 IEEE International Conference on Robotics and Automation (ICRA), 2025, pp. 14 513–14 519
2025
-
[10]
Real- time multilevel terrain-aware path planning for ground mobile robots in large-scale rough terrains,
Y. Li, K. Chen, Y. Wang, W. Zhang, J. Wang, H. Chen, and Y. Liu, “Real- time multilevel terrain-aware path planning for ground mobile robots in large-scale rough terrains,”IEEE Transactions on Robotics, vol. 41, pp. 4159–4179, 2025
2025
-
[11]
Autonomous exploration development environment and the planning algorithms,
C. Cao, H. Zhu, F. Yang, Y. Xia, H. Choset, J. Oh, and J. Zhang, “Autonomous exploration development environment and the planning algorithms,” in2022 IEEE International Conference on Robotics and Automation (ICRA), 2022, pp. 8921–8928
2022
-
[12]
FALCON: Fast autonomous aerial exploration using coverage path guidance,
Y. Zhang, X. Chen, C. M. Feng, B. Zhou, and S. Shen, “FALCON: Fast autonomous aerial exploration using coverage path guidance,”IEEE Transactions on Robotics, vol. 41, pp. 1365–1385, 2025
2025
-
[13]
ROG-Map: An efficient robocentric occupancy grid map for large-scene and high-resolution lidar- based motion planning,
Y. Ren, Y. Cai, F. Zhu, S. Liang, and F. Zhang, “ROG-Map: An efficient robocentric occupancy grid map for large-scene and high-resolution lidar- based motion planning,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 8119–8125
2024
-
[14]
Geometrically constrained trajectory optimization for multicopters,
Z. Wang, X. Zhou, C. Xu, and F. Gao, “Geometrically constrained trajectory optimization for multicopters,”IEEE Trans. Robot., vol. 38, no. 5, pp. 3259–3278, 2022
2022
-
[15]
Fast-racing: An open- source strong baseline for SE(3) planning in autonomous drone racing,
Z. Han, Z. Wang, N. Pan, Y. Lin, C. Xu, and F. Gao, “Fast-racing: An open- source strong baseline for SE(3) planning in autonomous drone racing,” IEEE Robot. Autom. Lett., vol. 6, no. 4, pp. 8631–8638, 2021
2021
-
[16]
RAPTOR: Robust and perception- aware trajectory replanning for quadrotor fast flight,
B. Zhou, J. Pan, F. Gao, and S. Shen, “RAPTOR: Robust and perception- aware trajectory replanning for quadrotor fast flight,”IEEE Trans. Robot., vol. 37, no. 6, pp. 1992–2009, 2021
1992
-
[17]
Rough terrain navigation for legged robots using reachability planning and template learning,
L. Wellhausen and M. Hutter, “Rough terrain navigation for legged robots using reachability planning and template learning,” in2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021, pp. 6914–6921
2021
-
[18]
Elevation mapping for locomotion and navigation using GPU,
T. Miki, L. Wellhausen, R. Grandia, F. Jenelten, T. Homberger, and M. Hutter, “Elevation mapping for locomotion and navigation using GPU,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022, pp. 2273–2280
2022
-
[19]
Locomotion policy guided traversability learning using volumetric representations of complex environments,
J. Frey, D. Hoeller, S. Khattak, and M. Hutter, “Locomotion policy guided traversability learning using volumetric representations of complex environments,” inIROS. IEEE, 2022, pp. 5722–5729
2022
-
[20]
MARG: MAstering risky gap terrains for legged robots with elevation mapping,
Y. Dong, J. Ma, L. Zhao, W. Li, and P. Lu, “MARG: MAstering risky gap terrains for legged robots with elevation mapping,”IEEE Transactions on Robotics, vol. 41, pp. 6123–6139, 2025
2025
-
[21]
Stable trajectory planning for quadruped robots using terrain features at feet end,
C. Li, S. Lin, S. Qu, Z. Liu, Q. Yang, M. Q.-H. Meng, and Y. Sun, “Stable trajectory planning for quadruped robots using terrain features at feet end,” IEEE Robotics and Automation Letters, vol. 11, no. 2, pp. 2266–2273, 2026
2026
-
[22]
Memory-efficient boundary map for large-scale occupancy grid mapping,
B. Tang, Y. Ren, Y. Cai, F. Kong, W. Liu, F. Zhu, L. Yin, L. Shi, and F. Zhang, “Memory-efficient boundary map for large-scale occupancy grid mapping,”The International Journal of Robotics Research, p. 02783649261425266, 2026
2026
-
[23]
MARSIM: A light-weight point-realistic simulator for lidar- based uavs,
F. Kong, X. Liu, B. Tang, J. Lin, Y. Ren, Y. Cai, F. Zhu, N. Chen, and F. Zhang, “MARSIM: A light-weight point-realistic simulator for lidar- based uavs,”arXiv preprint arXiv:2211.10716, 2022
arXiv 2022
-
[24]
On the limited memory BFGS method for large scale optimization,
D. C. Liu and J. Nocedal, “On the limited memory BFGS method for large scale optimization,”Mathematical Programming, vol. 45, no. 1, pp. 503–528, 1989
1989
-
[25]
Fast-lio2: Fast direct lidar- inertial odometry,
W. Xu, Y. Cai, D. He, J. Lin, and F. Zhang, “Fast-lio2: Fast direct lidar- inertial odometry,”IEEE Transactions on Robotics, vol. 38, no. 4, pp. 2053–2073, 2022
2053
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.