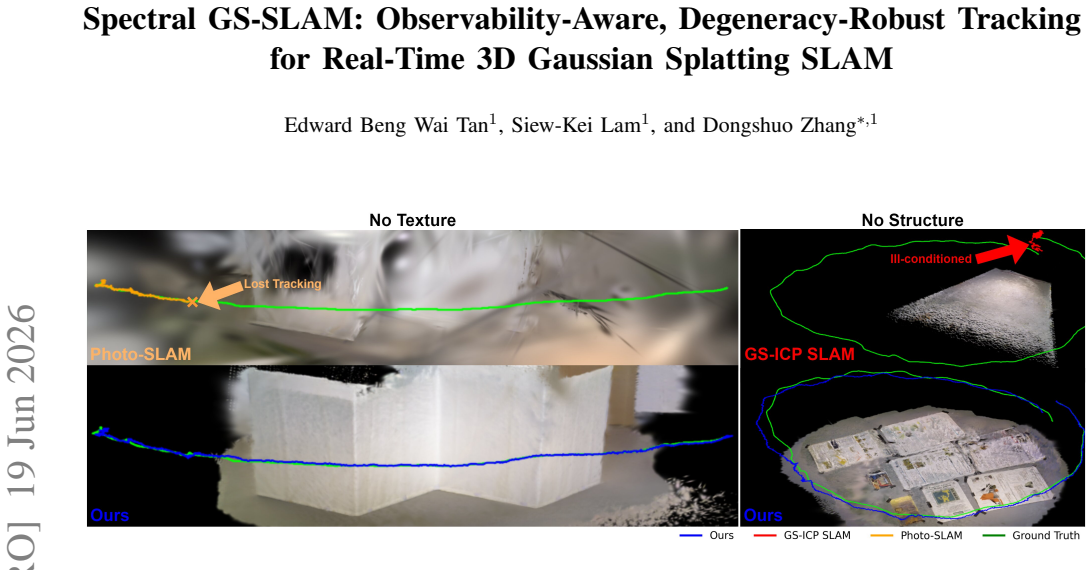
Spectral GS-SLAM: Observability-Aware, Degeneracy-Robust Tracking for Real-Time 3D Gaussian Splatting SLAM
Pith reviewed 2026-06-26 14:03 UTC · model grok-4.3
The pith
Spectral GS-SLAM adds adaptive compensation to ICP and feature tracking so 3D Gaussian Splatting SLAM stays stable in degenerate scenes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
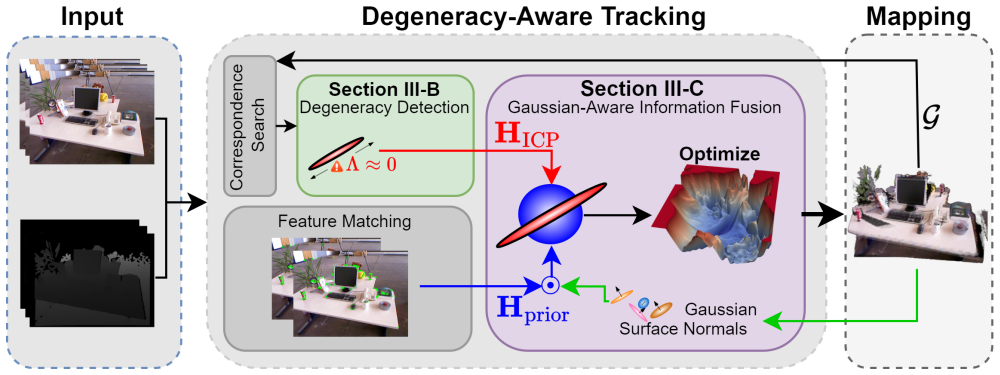
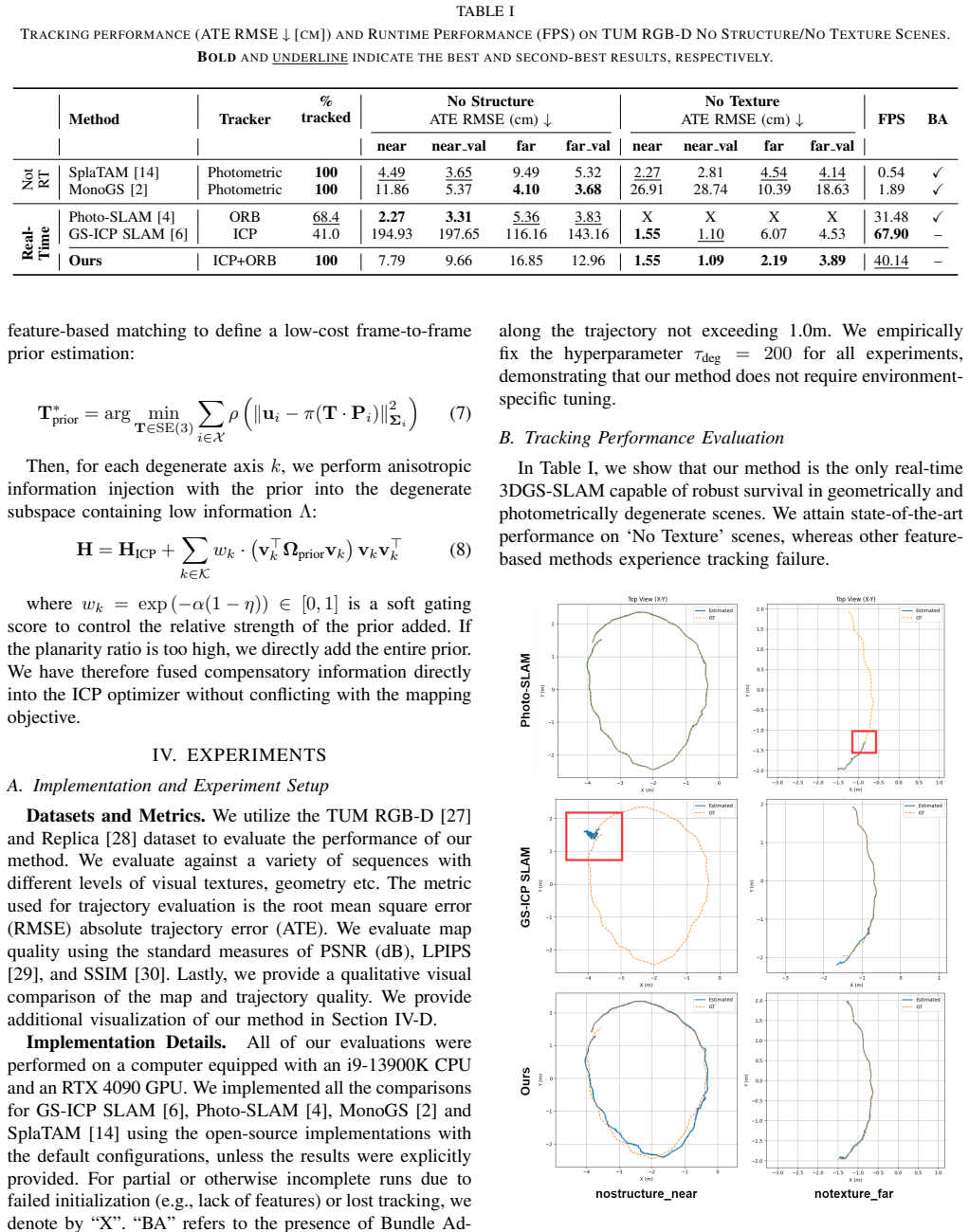
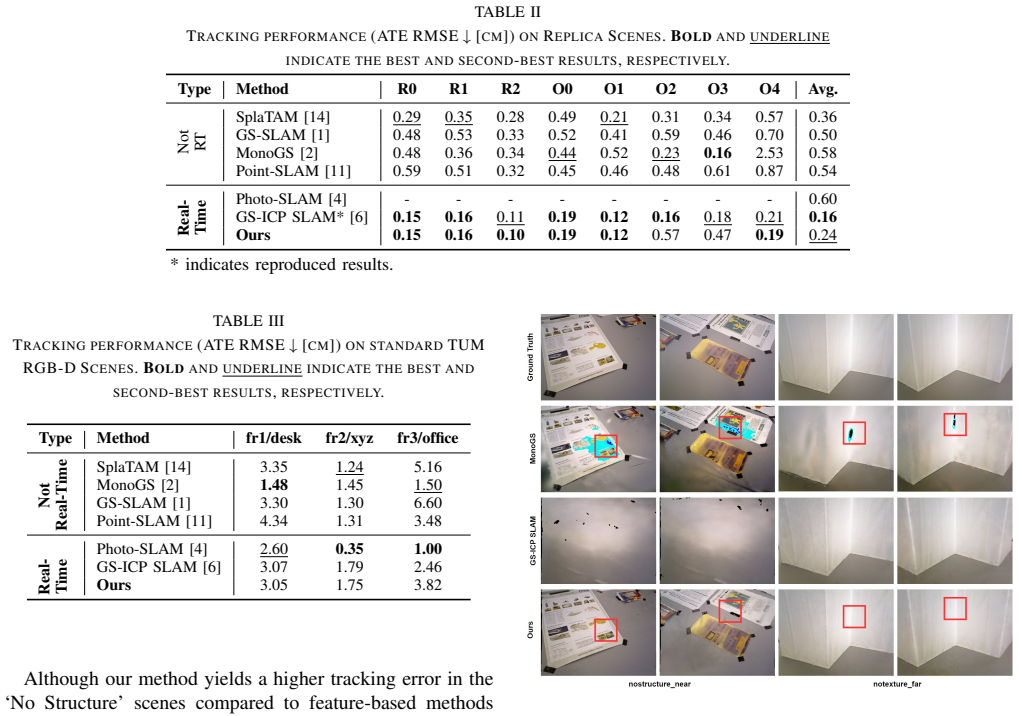
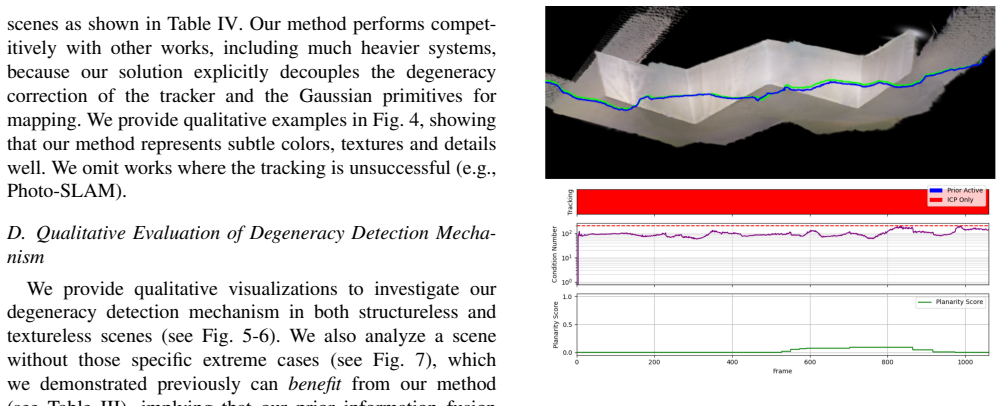
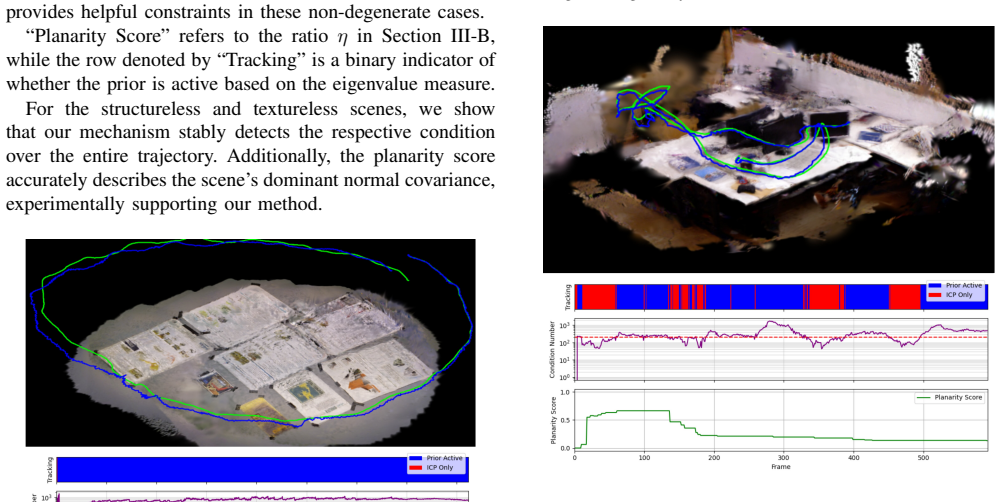
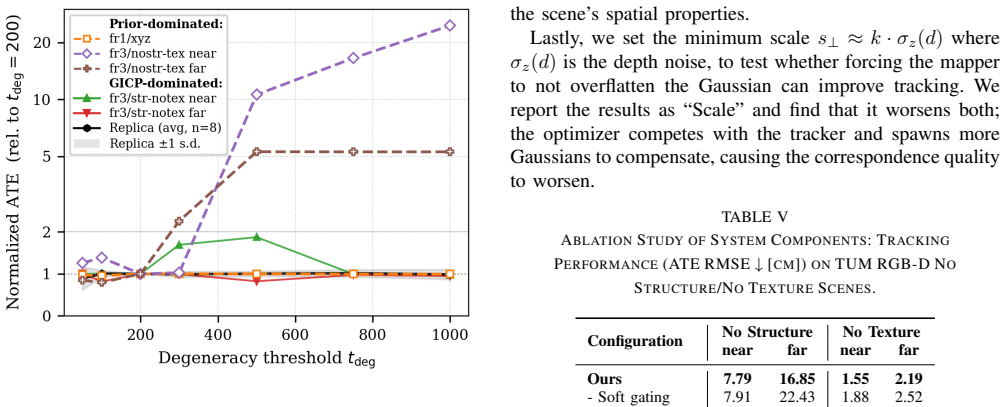
Spectral GS-SLAM integrates ICP with complementary feature-based constraints and mitigates numerical instability by adaptively compensating under-constrained directions in degenerate scenarios. It introduces a Gaussian-aware planarity weighting that exploits the intrinsic covariance structure of 3D Gaussians to characterize scene geometry and guide information fusion without interfering with the shared Gaussian representation used for mapping. Evaluations on challenging TUM RGB-D sequences show real-time performance at 40.14 FPS together with consistent tracking in both structureless and featureless environments.
What carries the argument
Adaptive spectral compensation of under-constrained directions paired with Gaussian-aware planarity weighting derived from 3D Gaussian covariances.
If this is right
- Trajectory estimates remain usable in indoor scenes that lack distinct geometry or texture.
- Mapping and tracking continue to share the same Gaussian representation without added overhead.
- Real-time rates above 40 FPS are retained even when degeneracy compensation is active.
- Performance in ordinary scenes stays comparable to prior 3DGS-SLAM systems.
Where Pith is reading between the lines
- The same compensation pattern could be tested on other radiance-field SLAM pipelines that already maintain per-point covariances.
- If the weighting proves stable across different Gaussian optimization schedules, it might reduce the frequency of manual degeneracy checks in field deployments.
- Extending the approach to sequences with moving objects would require checking whether updated Gaussian covariances still supply reliable planarity signals.
Load-bearing premise
The covariance matrices of the optimized 3D Gaussians reliably encode local scene geometry for the purpose of weighting constraints.
What would settle it
Execute the tracker on a TUM RGB-D sequence containing a known planar or textureless region and measure whether the reported trajectory error stays below the level reported for competing methods.
Figures
read the original abstract
Recent 3DGS-SLAM systems enable real-time operation by leveraging conventional feature matching or ICP-based tracking, thereby avoiding the heavy dense photometric optimization used in earlier approaches. However, feature matching remains prone to failure in textureless environments, while ICP-based tracking struggles in structureless or geometrically degenerate scenes due to ill-conditioned optimization. To address this issue, we propose Spectral GS-SLAM, an efficient yet robust tracking framework that integrates ICP with complementary feature-based constraints. Our method mitigates numerical instability by adaptively compensating under-constrained directions in degenerate scenarios, without interfering with the shared Gaussian representation used for mapping. We further introduce a Gaussian-aware planarity weighting mechanism that exploits the intrinsic covariance structure of 3D Gaussians to characterize scene geometry and guide information fusion. Extensive evaluations on challenging TUM RGB-D sequences demonstrate that Spectral GS-SLAM achieves real-time performance (40.14 FPS) while maintaining consistent tracking in both structureless and featureless environments. The proposed method preserves trajectory integrity in degenerate scenes while maintaining competitive performance in non-adverse conditions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents Spectral GS-SLAM, an observability-aware tracking framework for real-time 3D Gaussian Splatting SLAM. It integrates ICP-based tracking with complementary feature-based constraints and introduces a Gaussian-aware planarity weighting derived from 3D Gaussian covariances to adaptively compensate degenerate directions in structureless or featureless scenes. The method is claimed to achieve 40.14 FPS on TUM RGB-D sequences while preserving trajectory integrity in degenerate conditions and competitive performance otherwise, without altering the shared Gaussian representation used for mapping.
Significance. If the decoupling between the planarity weighting and the underlying Gaussian optimization is verified and the robustness claims are supported by detailed experiments, the work could provide a practical engineering advance for degeneracy-robust 3DGS-SLAM in robotics applications. The use of intrinsic Gaussian covariance structure for geometry characterization is a potentially useful idea, though its impact depends on empirical validation beyond summary-level statements.
major comments (2)
- [Abstract] Abstract: the central claim that the Gaussian-aware planarity weighting 'guides information fusion' while 'without interfering with the shared Gaussian representation used for mapping' is load-bearing for both tracking robustness and mapping consistency, yet the abstract supplies no mechanism, equation, or verification that the covariance-derived weights are applied exclusively to the tracking objective and are not back-propagated.
- [Abstract] Abstract: the performance numbers (40.14 FPS) and robustness assertions ('consistent tracking in both structureless and featureless environments', 'preserves trajectory integrity') are presented without any baseline comparisons, absolute trajectory error metrics, dataset split details, or ablation studies, which are required to substantiate the cross-condition claims.
minor comments (1)
- [Abstract] Abstract: the title refers to a 'Spectral' method, but the abstract provides no indication of how spectral analysis (e.g., eigenvalue decomposition for observability) is used in the degeneracy compensation.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the major comments point by point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the Gaussian-aware planarity weighting 'guides information fusion' while 'without interfering with the shared Gaussian representation used for mapping' is load-bearing for both tracking robustness and mapping consistency, yet the abstract supplies no mechanism, equation, or verification that the covariance-derived weights are applied exclusively to the tracking objective and are not back-propagated.
Authors: The abstract provides a concise summary of the approach. The full mechanism, including the equations for deriving the planarity weights from 3D Gaussian covariances and their exclusive application to the tracking objective (via adaptive spectral compensation), is detailed in Section 3 of the manuscript. The mapping optimization remains independent, as confirmed by the decoupling in our formulation. We agree that a brief clarification in the abstract could strengthen the claim and will revise accordingly. revision: yes
-
Referee: [Abstract] Abstract: the performance numbers (40.14 FPS) and robustness assertions ('consistent tracking in both structureless and featureless environments', 'preserves trajectory integrity') are presented without any baseline comparisons, absolute trajectory error metrics, dataset split details, or ablation studies, which are required to substantiate the cross-condition claims.
Authors: As is standard for abstracts, these are high-level claims supported by the detailed experiments in Section 4, which include comparisons to baseline methods, ATE metrics on TUM RGB-D sequences, and ablations demonstrating robustness in degenerate scenes. The 40.14 FPS is the average real-time performance reported. If the referee suggests, we can include a short phrase in the abstract referencing the competitive performance, but the substantiation is provided in the body of the paper. revision: partial
Circularity Check
No circularity; derivation is engineering integration without self-referential reduction
full rationale
The abstract and description present Spectral GS-SLAM as an integration of ICP tracking with feature constraints, plus a Gaussian-aware planarity weighting derived from 3D Gaussian covariances to handle degeneracy. No equations, fitted parameters renamed as predictions, self-citations, or uniqueness theorems are quoted. The weighting is described as exploiting intrinsic covariance structure without back-propagation to the shared mapping representation, but this is presented as a design choice rather than a derivation that reduces to its own inputs by construction. No load-bearing step matches any enumerated circularity pattern; the method remains self-contained against external benchmarks like TUM sequences.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption ICP optimization can be stabilized by complementary feature-based constraints in degenerate scenes
Reference graph
Works this paper leans on
-
[1]
GS- SLAM: Dense Visual SLAM with 3D Gaussian Splatting,
C. Yan, D. Qu, D. Xu, B. Zhao, Z. Wang, D. Wang, and X. Li, “GS- SLAM: Dense Visual SLAM with 3D Gaussian Splatting,” 2024, pp. 19 595–19 604
2024
-
[2]
Gaussian Splatting SLAM,
H. Matsuki, R. Murai, P. H. J. Kelly, and A. J. Davison, “Gaussian Splatting SLAM,” in2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, W A, USA: IEEE, Jun. 2024, pp. 18 039–18 048
2024
-
[3]
Generalized-ICP,
A. V . Segal, D. H¨ahnel, and S. Thrun, “Generalized-ICP,” inRobotics: Science and Systems, 2009
2009
-
[4]
Photo-SLAM: Real-time Simultaneous Localization and Photorealistic Mapping for Monocular Stereo and RGB-D Cameras,
H. Huang, L. Li, H. Cheng, and S.-K. Yeung, “Photo-SLAM: Real-time Simultaneous Localization and Photorealistic Mapping for Monocular Stereo and RGB-D Cameras,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Jun. 2024, pp. 21 584–21 593
2024
-
[5]
ORB: An effi- cient alternative to SIFT or SURF,
E. Rublee, V . Rabaud, K. Konolige, and G. Bradski, “ORB: An effi- cient alternative to SIFT or SURF,” in2011 International Conference on Computer Vision, Nov. 2011, pp. 2564–2571, iSSN: 2380-7504
2011
-
[6]
RGBD GS-ICP SLAM,
S. Ha, J. Yeon, and H. Yu, “RGBD GS-ICP SLAM,” inComputer Vision – ECCV 2024, A. Leonardis, E. Ricci, S. Roth, O. Russakovsky, T. Sattler, and G. Varol, Eds., vol. 15094. Cham: Springer Nature Switzerland, 2025, pp. 180–197
2024
-
[7]
NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis,
B. Mildenhall, P. P. Srinivasan, M. Tancik, J. T. Barron, R. Ramamoor- thi, and R. Ng, “NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis,” inComputer Vision – ECCV 2020, A. Vedaldi, H. Bischof, T. Brox, and J.-M. Frahm, Eds. Cham: Springer International Publishing, 2020, pp. 405–421
2020
-
[8]
iMAP: Implicit Mapping and Positioning in Real-Time,
E. Sucar, S. Liu, J. Ortiz, and A. J. Davison, “iMAP: Implicit Mapping and Positioning in Real-Time,” inProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Oct. 2021, pp. 6229–6238
2021
-
[9]
NICE-SLAM: Neural Implicit Scalable Encoding for SLAM,
Z. Zhu, S. Peng, V . Larsson, W. Xu, H. Bao, Z. Cui, M. R. Oswald, and M. Pollefeys, “NICE-SLAM: Neural Implicit Scalable Encoding for SLAM,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Jun. 2022, pp. 12 786–12 796
2022
-
[10]
Orbeez-SLAM: A Real- time Monocular Visual SLAM with ORB Features and NeRF-realized Mapping,
C.-M. Chung, Y .-C. Tseng, Y .-C. Hsu, X.-Q. Shi, Y .-H. Hua, J.-F. Yeh, W.-C. Chen, Y .-T. Chen, and W. H. Hsu, “Orbeez-SLAM: A Real- time Monocular Visual SLAM with ORB Features and NeRF-realized Mapping,” in2023 IEEE International Conference on Robotics and Automation (ICRA), May 2023, pp. 9400–9406
2023
-
[11]
Point- SLAM: Dense Neural Point Cloud-based SLAM,
E. Sandstr ¨om, Y . Li, L. Van Gool, and M. R. Oswald, “Point- SLAM: Dense Neural Point Cloud-based SLAM,” inProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Oct. 2023, pp. 18 433–18 444
2023
-
[12]
ESLAM: Efficient Dense SLAM System Based on Hybrid Representation of Signed Distance Fields,
M. M. Johari, C. Carta, and F. Fleuret, “ESLAM: Efficient Dense SLAM System Based on Hybrid Representation of Signed Distance Fields,” in2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Jun. 2023, pp. 17 408–17 419, iSSN: 2575-7075
2023
-
[13]
3D Gaussian Splatting for Real-Time Radiance Field Rendering,
B. Kerbl, G. Kopanas, T. Leimkuehler, and G. Drettakis, “3D Gaussian Splatting for Real-Time Radiance Field Rendering,”ACM Trans. Graph., vol. 42, no. 4, pp. 139:1–139:14, Jul. 2023
2023
-
[14]
SplaTAM: Splat Track & Map 3D Gaussians for Dense RGB-D SLAM,
N. Keetha, J. Karhade, K. M. Jatavallabhula, G. Yang, S. Scherer, D. Ramanan, and J. Luiten, “SplaTAM: Splat Track & Map 3D Gaussians for Dense RGB-D SLAM,” 2024, pp. 21 357–21 366
2024
-
[15]
ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual–Inertial, and Multimap SLAM,
C. Campos, R. Elvira, J. J. G. Rodr ´ıguez, J. M. M. Montiel, and J. D. Tard ´os, “ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual–Inertial, and Multimap SLAM,”IEEE Transactions on Robotics, vol. 37, no. 6, pp. 1874–1890, Dec. 2021
2021
-
[16]
Keyframe-based visual–inertial odometry using nonlinear optimiza- tion,
S. Leutenegger, S. Lynen, M. Bosse, R. Siegwart, and P. Furgale, “Keyframe-based visual–inertial odometry using nonlinear optimiza- tion,”The International Journal of Robotics Research, vol. 34, no. 3, pp. 314–334, Mar. 2015
2015
-
[17]
VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator,
T. Qin, P. Li, and S. Shen, “VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator,”IEEE Transactions on Robotics, vol. 34, no. 4, pp. 1004–1020, Aug. 2018
2018
-
[18]
LIO- SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping,
T. Shan, B. Englot, D. Meyers, W. Wang, C. Ratti, and D. Rus, “LIO- SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Las Vegas, NV , USA: IEEE, Oct. 2020, pp. 5135–5142
2020
-
[19]
VIGS- SLAM: Visual Inertial Gaussian Splatting SLAM,
Z. Zhu, W. Zhang, N. Haala, M. Pollefeys, and D. Barath, “VIGS- SLAM: Visual Inertial Gaussian Splatting SLAM,” 2025, version Number: 1
2025
-
[20]
Gaussian Splatting on the Move: Blur and Rolling Shutter Compensation for Natural Camera Motion,
O. Seiskari, J. Ylilammi, V . Kaatrasalo, P. Rantalankila, M. Turku- lainen, J. Kannala, E. Rahtu, and A. Solin, “Gaussian Splatting on the Move: Blur and Rolling Shutter Compensation for Natural Camera Motion,” inComputer Vision – ECCV 2024: 18th European Conference, Milan, Italy, September 29–October 4, 2024, Proceedings, Part LXXI. Berlin, Heidelberg: ...
2024
-
[21]
LiV-GS: LiDAR-Vision Inte- gration for 3D Gaussian Splatting SLAM in Outdoor Environments,
R. Xiao, W. Liu, Y . Chen, and L. Hu, “LiV-GS: LiDAR-Vision Inte- gration for 3D Gaussian Splatting SLAM in Outdoor Environments,” IEEE Robotics and Automation Letters, vol. 10, no. 1, pp. 421–428, Jan. 2025
2025
-
[22]
On degeneracy of optimization- based state estimation problems,
J. Zhang, M. Kaess, and S. Singh, “On degeneracy of optimization- based state estimation problems,” in2016 IEEE International Confer- ence on Robotics and Automation (ICRA), May 2016, pp. 809–816
2016
-
[23]
X-ICP: Localizability-Aware LiDAR Registration for Robust Localization in Extreme Environments,
T. Tuna, J. Nubert, Y . Nava, S. Khattak, and M. Hutter, “X-ICP: Localizability-Aware LiDAR Registration for Robust Localization in Extreme Environments,”IEEE Transactions on Robotics, vol. 40, pp. 452–471, 2024
2024
-
[24]
LP-ICP: General Localizability-Aware Point Cloud Registration for Robust Localization in Extreme Unstructured Environments,
H. Yue, Q. Xu, F. Chen, J. Pan, and W. Chen, “LP-ICP: General Localizability-Aware Point Cloud Registration for Robust Localization in Extreme Unstructured Environments,” 2025, version Number: 3
2025
-
[25]
2D Gaussian Splatting for Geometrically Accurate Radiance Fields,
B. Huang, Z. Yu, A. Chen, A. Geiger, and S. Gao, “2D Gaussian Splatting for Geometrically Accurate Radiance Fields,” inSIGGRAPH 2024 Conference Papers. Association for Computing Machinery, 2024
2024
-
[26]
G2S-ICP SLAM: Geometry-aware Gaussian Splatting ICP SLAM,
G. Pak, H. M. Cho, and E. Kim, “G2S-ICP SLAM: Geometry-aware Gaussian Splatting ICP SLAM,” Jul. 2025, arXiv:2507.18344 [cs]. [Online]. Available: http://arxiv.org/abs/2507.18344
arXiv 2025
-
[27]
A Benchmark for the Evaluation of RGB-D SLAM Systems,
J. Sturm, N. Engelhard, F. Endres, W. Burgard, and D. Cremers, “A Benchmark for the Evaluation of RGB-D SLAM Systems,” inProc. of the International Conference on Intelligent Robot Systems (IROS), Oct. 2012
2012
-
[28]
The Replica Dataset: A Digital Replica of Indoor Spaces,
J. Straub, T. Whelan, L. Ma, Y . Chen, E. Wijmans, S. Green, J. J. En- gel, R. Mur-Artal, C. Ren, S. Verma, A. Clarkson, M. Yan, B. Budge, Y . Yan, X. Pan, J. Yon, Y . Zou, K. Leon, N. Carter, J. Briales, T. Gillingham, E. Mueggler, L. Pesqueira, M. Savva, D. Batra, H. M. Strasdat, R. D. Nardi, M. Goesele, S. Lovegrove, and R. Newcombe, “The Replica Datas...
Pith/arXiv arXiv 1906
-
[29]
The Unreasonable Effectiveness of Deep Features as a Perceptual Metric,
R. Zhang, P. Isola, A. A. Efros, E. Shechtman, and O. Wang, “The Unreasonable Effectiveness of Deep Features as a Perceptual Metric,” inProceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Jun. 2018
2018
-
[30]
Image quality assessment: from error visibility to structural similarity,
Zhou Wang, A. Bovik, H. Sheikh, and E. Simoncelli, “Image quality assessment: from error visibility to structural similarity,”IEEE Trans- actions on Image Processing, vol. 13, no. 4, pp. 600–612, Apr. 2004
2004
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.