Voluntary Triggering of Shared-Autonomous Prosthetic Control via IMU-Based Motion Gestures
Pith reviewed 2026-06-26 13:14 UTC · model grok-4.3
The pith
IMU-detected arm gestures let users voluntarily trigger grasp and release in shared-autonomous prosthetics.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
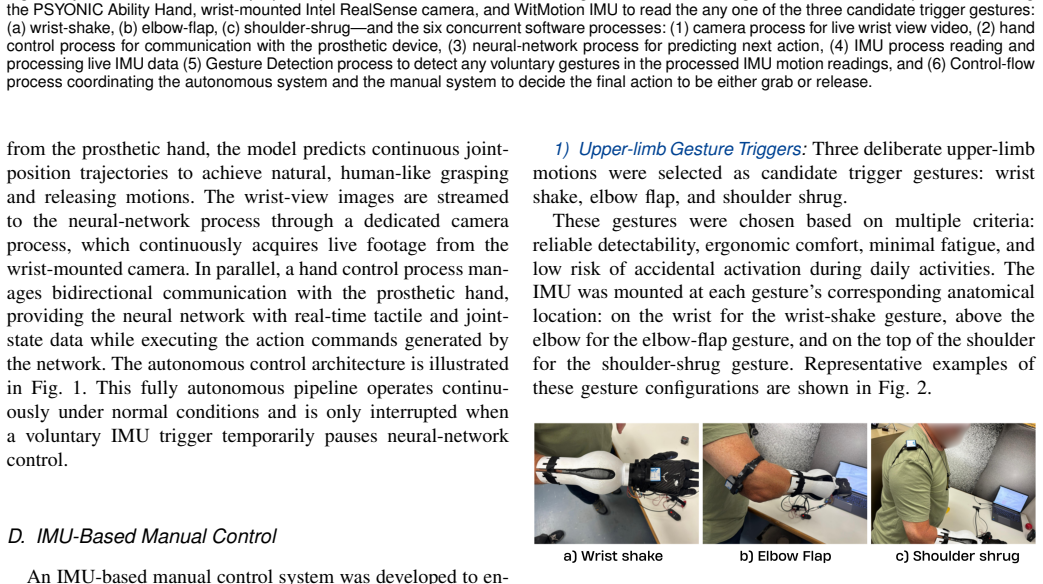
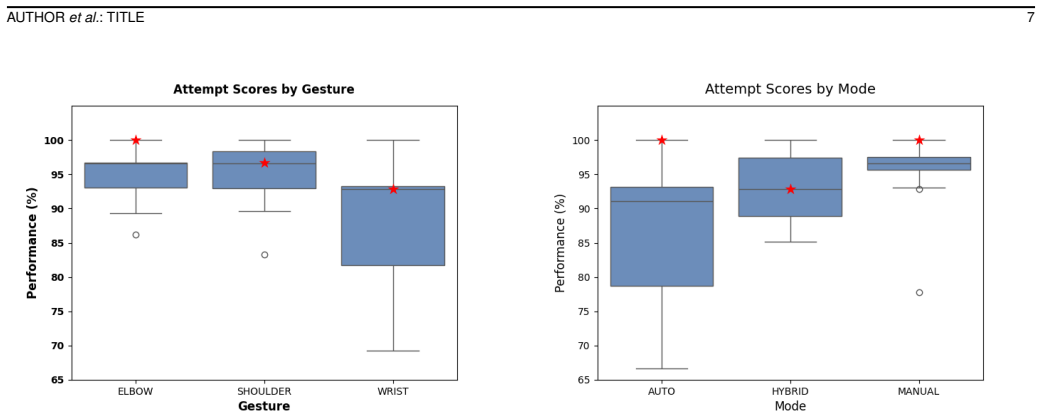
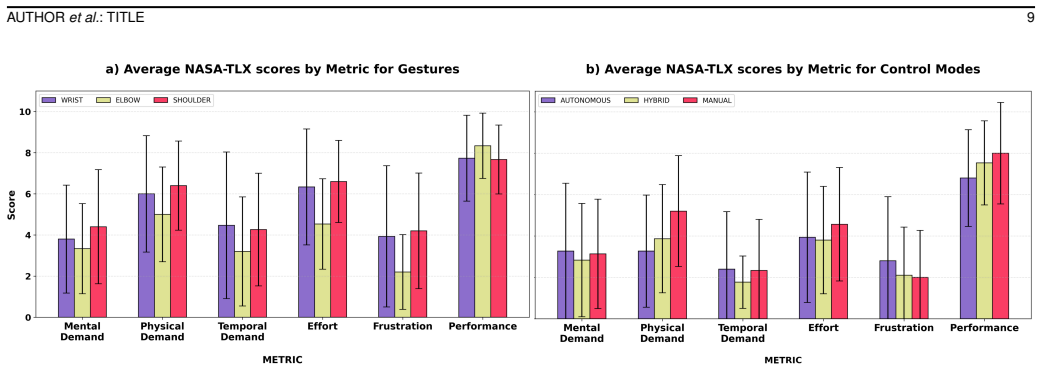
An IMU-based gesture interface recognizes shoulder shrug, elbow flap, and wrist shake motions to let users initiate or override grasp and release in autonomous, hybrid, or manual prosthetic control; the elbow flap achieves 95 percent mean success and 66 percent preference, while autonomous and hybrid modes are chosen most often for daily use, suggesting better alignment of intent with action and improved perceived control.
What carries the argument
The real-time motion detection algorithm that classifies three deliberate upper-limb gestures from IMU signals to issue voluntary triggers for grasp or release within the shared-autonomous control loop.
If this is right
- Release actions become feasible without needing proximity to a surface.
- Users gain an explicit override that reduces unintended grasp or release errors.
- Hybrid and autonomous modes remain preferred for daily tasks while manual mode offers highest accuracy.
- The same gesture set can be added to existing shared-autonomous systems to improve safety.
- The method provides a route to extend voluntary control to other real-world autonomous devices.
Where Pith is reading between the lines
- The same gesture triggers could be tested on users with actual limb differences to check whether preference rankings change.
- Combining the IMU gestures with other sensors might lower false-positive rates in noisy environments.
- The approach might apply to non-prosthetic devices that need quick user overrides of autonomous behavior.
- Longer-term use studies could reveal whether the gestures remain comfortable or become fatiguing.
Load-bearing premise
The motion detection algorithm can reliably separate the three chosen gestures from ordinary daily movements without frequent false triggers across different conditions.
What would settle it
A test in which participants wear the IMU sensors during varied daily activities and produce many unintended triggers would show the algorithm cannot distinguish gestures reliably.
Figures

read the original abstract
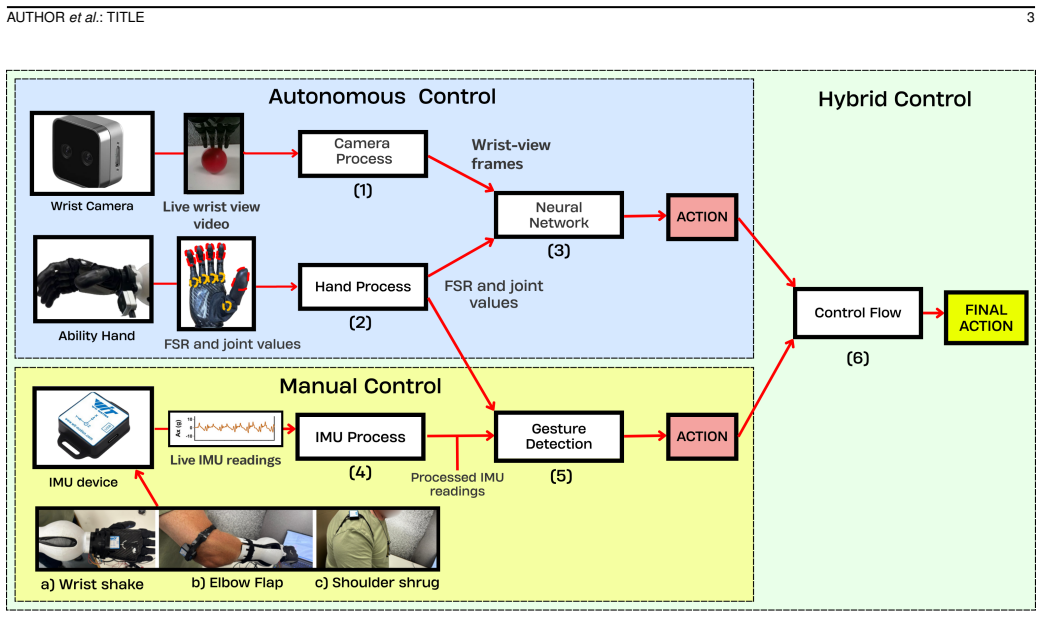
Recently, a shared-autonomous scheme has been introduced into prosthetic hand control field, where the user provides high-level intent by moving the hand towards the target, and the artificial intelligence system autonomously executes low-level control (e.g., grasp and release the object). This system reduces user workload but risks unintended grasp or release actions without explicit user control. In particular, release actions remain challenging, as vision-based autonomous systems typically assume that proximity to a supporting surface signals the user's intent to let go, making mid-air release tasks difficult and error-prone. This study presents an inertial measurement unit (IMU)-based gesture-triggered interface enabling voluntary initiation or override of grasp and release actions to the autonomous system. A real-time motion detection algorithm recognizes three deliberate upper-limb gestures: shoulder shrug, elbow flap, and wrist shake, across three control paradigms: autonomous, hybrid, and manual. In a controlled study with 14 able-bodied participants and one individual with an upper-limb difference, the elbow flap emerged as the most preferred gesture (66% preference) and achieved 95% mean successful rate. Manual mode produced the highest accuracy (95%), while autonomous mode and hybrid mode were most preferred for daily use (38%). Results suggest that IMU-based voluntary triggers enhance alignment between user intent and prosthetic action, improving reliability and perceived control. This approach offers a practical pathway toward safer, more adaptable prosthetic systems and can be extended to real-world applications requiring rapid, intentional overrides of autonomous behavior.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents an IMU-based gesture recognition system for voluntary triggering of grasp and release actions in shared-autonomous prosthetic hand control. It identifies three deliberate gestures (shoulder shrug, elbow flap, wrist shake) and evaluates them in a controlled user study with 15 participants (14 able-bodied, 1 with limb difference) across autonomous, hybrid, and manual control paradigms. The study reports a 95% mean success rate for the elbow flap gesture, which was preferred by 66% of participants, and notes preferences for autonomous and hybrid modes for daily use.
Significance. If the detection algorithm performs reliably outside controlled settings, the approach could provide a practical method for intentional overrides in shared-autonomous prosthetics, addressing challenges with unintended release actions in vision-based systems. The inclusion of a participant with limb difference and direct measurement of user preferences and success rates under explicit instructions offers initial empirical support for feasibility in prosthetic applications.
major comments (1)
- [Abstract and study description (real-time motion detection algorithm)] The central claim that IMU-based voluntary triggers improve reliability by enabling intentional overrides rests on the assumption that the algorithm can distinguish the three gestures from normal daily movements without high false-positive rates. However, the reported study measures success rates (95% for elbow flap) only when participants are explicitly instructed to perform the gestures in a controlled lab environment. No protocol or data is described for assessing specificity or false-positive rates during continuous, unstructured arm movements typical of daily use, which directly undermines the motivation for the system as stated in the abstract.
minor comments (1)
- [Abstract] The abstract reports '95% mean successful rate' without error bars, standard deviations, or statistical details, and does not specify exclusion criteria or participant demographics beyond the counts.
Simulated Author's Rebuttal
We thank the referee for highlighting the distinction between controlled feasibility testing and real-world specificity evaluation. We address the major comment below and will revise the manuscript to better align claims with the presented evidence.
read point-by-point responses
-
Referee: [Abstract and study description (real-time motion detection algorithm)] The central claim that IMU-based voluntary triggers improve reliability by enabling intentional overrides rests on the assumption that the algorithm can distinguish the three gestures from normal daily movements without high false-positive rates. However, the reported study measures success rates (95% for elbow flap) only when participants are explicitly instructed to perform the gestures in a controlled lab environment. No protocol or data is described for assessing specificity or false-positive rates during continuous, unstructured arm movements typical of daily use, which directly undermines the motivation for the system as stated in the abstract.
Authors: We agree that the study protocol instructed participants to perform the three gestures on cue in a controlled setting and did not include continuous monitoring of unstructured arm movements to quantify false-positive rates. This is a genuine limitation of the current work; the reported 95% success rate demonstrates reliable detection when the gesture is intentionally performed, but does not yet establish specificity against incidental movements in daily life. In the revised manuscript we will (1) add an explicit Limitations subsection that states this gap and outlines the need for future ambulatory data collection, (2) revise the abstract and introduction to frame the contribution as an initial demonstration of voluntary override feasibility under controlled conditions rather than a fully validated real-world solution, and (3) clarify that the real-time IMU algorithm thresholds were tuned on the instructed trials only. These changes will prevent overstatement of the current evidence while preserving the motivation for the approach. revision: yes
Circularity Check
Empirical user study with direct measurements; no derivations or self-referential predictions
full rationale
The paper reports results from a controlled user study with 15 participants measuring gesture success rates (e.g., 95% for elbow flap) and preferences across control modes. No equations, fitted parameters, predictions derived from inputs, or load-bearing self-citations appear in the abstract or described methods. Claims rest on empirical data collection rather than any derivation chain that reduces to its own inputs by construction. This matches the default case of a self-contained empirical paper with no circularity.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption IMU sensors can detect the three specified upper-limb gestures in real time with acceptable accuracy during prosthetic use
Reference graph
Works this paper leans on
-
[1]
Product narrative: Digital assistive technology. a market landscape and strategic approach to increasing access to digital assistive technology in low- and middle-income countries,
M. Savageet al., “Product narrative: Digital assistive technology. a market landscape and strategic approach to increasing access to digital assistive technology in low- and middle-income countries,” Clinton Health Access Initiative (CHAI), London, U.K., Tech. Rep., 2020, tech. Rep. [Online]. Available: https://www.at2030.org/product-narrative: -digital-a...
2020
-
[2]
Global prevalence of traumatic non-fatal limb amputation,
C. L. McDonald, S. Westcott-McCoy, M. R. Weaver, J. Haagsma, and D. Kartin, “Global prevalence of traumatic non-fatal limb amputation,” Prosthetics and Orthotics International, vol. 45, no. 2, pp. 105–114, 2021
2021
-
[3]
Epidemiology of limb amputations and prosthetic use,
J. Fr ¨olke, G. Rommers, A. de Boer, T. Groenveld, and R. Leijendekkers, “Epidemiology of limb amputations and prosthetic use,”Archives of Physical Medicine and Rehabilitation, vol. 105, no. 2, pp. 280–286, 2024
2024
-
[4]
F. Schweitzer and A. Campeau-Lecours, “Imu-based hand gesture interface implementing a sequence-matching algorithm for the control of assistive technologies,”Signals, vol. 2, pp. 729–753, 2021. [Online]. Available: https://doi.org/10.3390/signals2040043
-
[5]
Techniques of emg signal analysis: detection, processing, classification and applications,
M. B. I. Reaz, M. S. Hussain, and F. Mohd-Yasin, “Techniques of emg signal analysis: detection, processing, classification and applications,” Biol. Proced. Online, vol. 8, pp. 11–35, 2006. [Online]. Available: https://doi.org/10.1251/bpo115
-
[6]
Improved prosthetic hand control with concurrent use of myoelectric and inertial measurements,
A. Krasoulis, I. Kyranou, M. S. Erden, K. Nazarpour, and S. Vijayakumar, “Improved prosthetic hand control with concurrent use of myoelectric and inertial measurements,”Journal of NeuroEngineering and Rehabilitation, vol. 14, p. 71, 2017. [Online]. Available: https://doi.org/10.1186/s12984-017-0284-4
-
[7]
A motion-classification strategy based on semg-eeg signal combination for upper-limb amputees,
X. Li, O. W. Samuel, X. Zhang, H. Wang, P. Fang, and G. Li, “A motion-classification strategy based on semg-eeg signal combination for upper-limb amputees,”Journal of NeuroEngineering and Rehabilitation, vol. 14, no. 2, 2017. [Online]. Available: https://doi.org/10.1186/s12984-016-0212-z
-
[8]
Controlling a below-the-elbow prosthetic arm using the infinity foot controller,
P. L. Bishay, J. Wilgus, R. Chen, D. Valenzuela, V . Medina, C. Tan, T. Ittner, M. Caldera, C. Rubalcava, S. Safarian, G. Funes Alfaro, A. Gonzalez-Martinez, M. Gosparini, J. Fuentes-Perez, A. Lima, J. Villalobos, and A. Solis, “Controlling a below-the-elbow prosthetic arm using the infinity foot controller,”Prosthesis, vol. 5, no. 4, pp. 1206–1231, Nov. ...
2023
-
[9]
Recognition of upper limb action intention based on imu,
B.-Y . Y . Jian-Wei Cui, Han Du and P.-D. Lu, “Recognition of upper limb action intention based on imu,”Sensors, p. 2, 2022
2022
-
[10]
Improving bimanual interaction with a prosthesis using semi-autonomous control,
R. V olkmaret al., “Improving bimanual interaction with a prosthesis using semi-autonomous control,”Journal of NeuroEngineering and Rehabilitation, vol. 16, no. 1, p. 140, 2019
2019
-
[11]
Semi-autonomous grasping control of prosthetic hand and wrist based on motion prior field,
X. Shi, W. Guo, W. Xu, Z. Yang, and X. Sheng, “Semi-autonomous grasping control of prosthetic hand and wrist based on motion prior field,”IEEE Robotics and Automation Letters, vol. 9, no. 6, pp. 5950– 5957, 2024
2024
-
[12]
Vision-based assistance for myoelectric hand control,
Y . He, R. Kubozono, O. Fukuda, N. Yamaguchi, and H. Okumura, “Vision-based assistance for myoelectric hand control,”IEEE Access, vol. 8, pp. 201 956–201 965, 2020
2020
-
[13]
Demonstration of a semi-autonomous hybrid brain–machine interface using human intracranial eeg, eye tracking, and computer vision to control a robotic upper limb prosthetic,
D. P. McMullen, G. Hotson, K. D. Katyal, B. A. Wester, M. S. Fifer, T. G. McGee, A. Harris, M. S. Johannes, R. J. V ogelstein, A. D. Ravitz et al., “Demonstration of a semi-autonomous hybrid brain–machine interface using human intracranial eeg, eye tracking, and computer vision to control a robotic upper limb prosthetic,”IEEE Transactions on Neural System...
2013
-
[14]
Development of a semantic model and synthetic dataset for multi-grasp affordance detection for application to vision-based upper- limb prosthetic grasping,
N. Ng, “Development of a semantic model and synthetic dataset for multi-grasp affordance detection for application to vision-based upper- limb prosthetic grasping,” Master’s thesis, University of Waterloo, 2024
2024
-
[15]
S. Wang, J. Zheng, Z. Huang, X. Zhang, V . Prado da Fonseca, B. Zheng, and X. Jiang, “Integrating computer vision to prosthetic hand control with semg: Preliminary results in grasp classification,” Frontiers in Robotics and AI, vol. 9, 2022. [Online]. Available: https://doi.org/10.3389/frobt.2022.948238
-
[16]
Toward human- in-the-loop shared control for upper-limb prostheses: a systematic anal- ysis of state-of-the-art technologies
W. Guo, W. Xu, Y . Zhao, X. Shi, X. Sheng, and X. Zhu, “Toward human- in-the-loop shared control for upper-limb prostheses: a systematic anal- ysis of state-of-the-art technologies.”IEEE transactions on Medical Robotics and Bionics, vol. 5, no. 3, pp. 563–579, 2024. AUTHORet al.: TITLE 11
2024
-
[17]
Shared control of upper limb prosthesis for improved robustness and usability,
R. J. Greene, D. Kim, R. Kaliki, P. Kazanzides, and N. Thakor, “Shared control of upper limb prosthesis for improved robustness and usability,” inBioRob 2022 - 9th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics. IEEE Computer Society, August 2022
2022
-
[18]
Towards Biosignals-Free Autonomous Prosthetic Hand Control via Imitation Learning
K. Shi, W. Lu, H. Zhao, V . P. da Fonseca, T. Zou, and X. Jiang, “To- ward biosignals-free autonomous prosthetic hand control via imitation learning,”arXiv preprint arXiv:2506.08795, Jun. 2025
work page internal anchor Pith review arXiv 2025
-
[19]
G. Ghazaei, A. Alameer, P. Degenaar, G. Morgan, and K. Nazarpour, “Deep learning-based artificial vision for grasp classification in myoelectric hands,”Journal of Neural Engineering, vol. 14, no. 3, pp. 13–15, 2017. [Online]. Available: https://doi.org/10.1088/1741-2552/ aa6802
-
[20]
A hybrid body-machine interface integrating signals from muscles and motions,
F. Rizzoglio, C. Pierella, D. De Santis, F. Mussa-Ivaldi, and M. Casadio, “A hybrid body-machine interface integrating signals from muscles and motions,”Journal of Neural Engineering, vol. 17, no. 4, p. 046004, Jul. 2020, pMID: 32521522. [Online]. Available: https://doi.org/10.1088/1741-2552/ab9b6c
-
[21]
E. Valarezo A ˜nazco, S.-J. Han, K. Kim, P. Lopez, T.-S. Kim, and S. Lee, “Hand gesture recognition using single patchable six-axis inertial measurement unit via recurrent neural networks,”Sensors, vol. 21, p. 1404, 2021. [Online]. Available: https://doi.org/10.3390/s21041404
-
[22]
Adaptive Data Transmission Algorithm for the System of Inertial Sensors for Hand Movement Acquisition,
M. Pielka, P. Janik, M. A. Janik, and Z. Wr ´obel, “Adaptive Data Transmission Algorithm for the System of Inertial Sensors for Hand Movement Acquisition,”Sensors, vol. 22, no. 24, p. 9866, Dec. 2022, pMID: 36560234; PMCID: PMC9781473
2022
-
[23]
Exploration of force myography and surface electromyography in hand gesture classification,
X. Jiang, L.-K. Merhi, Z. G. Xiao, and C. Menon, “Exploration of force myography and surface electromyography in hand gesture classification,” Medical Engineering & Physics, vol. 41, pp. 63–73, 2017. [Online]. Available: https://doi.org/10.1016/j.medengphy.2017.01.015
-
[24]
Phase-based grasp classification for prosthetic hand control using semg,
S. Wang, J. Zheng, B. Zheng, and X. Jiang, “Phase-based grasp classification for prosthetic hand control using semg,”Biosensors, vol. 12, no. 2, p. 57, 2022. [Online]. Available: https://doi.org/10.3390/ bios12020057
2022
-
[25]
Estimation of lower extremity joint moments and 3d ground reaction forces using imu sensors in multiple walking conditions: A deep learning approach,
M. S. B. Hossain, Z. Guo, and H. Choi, “Estimation of lower extremity joint moments and 3d ground reaction forces using imu sensors in multiple walking conditions: A deep learning approach,”IEEE Journal of Biomedical and Health Informatics, vol. 27, no. 6, pp. 2829–2840, Jun. 2023
2023
-
[26]
Implementation of user-independent hand gesture recognition classification models using imu and emg-based sensor fusion techniques,
J. G. Coll ´ı Alfaro, “Implementation of user-independent hand gesture recognition classification models using imu and emg-based sensor fusion techniques,” Master’s thesis, University of Western Ontario, Electronic Thesis and Dissertation Repository, 2019
2019
-
[27]
Basic hand gestures classification based on surface electromyography,
A. Palkowski and G. Redlarski, “Basic hand gestures classification based on surface electromyography,”Computational and Mathematical Methods in Medicine, vol. 2016, pp. 1–3, 2016, article ID 6481282
2016
-
[28]
The GRASP Taxonomy of Human Grasp Types,
T. Feix, J. Romero, H.-B. Schmiedmayer, A. M. Dollar, and D. Kragic, “The GRASP Taxonomy of Human Grasp Types,”IEEE Transactions on Human–Machine Systems, vol. 46, no. 1, pp. 66–77, Feb. 2016
2016
-
[29]
Estimating Vertical Ground Reaction Force during Walking Using a Single Inertial Sensor,
X. Jiang, C. Napier, B. Hannigan, J. J. Eng, and C. Menon, “Estimating Vertical Ground Reaction Force during Walking Using a Single Inertial Sensor,”Sensors, vol. 20, no. 15, p. 4345, Aug. 2020. [Online]. Available: https://doi.org/10.3390/s20154345
-
[30]
Feature–Classifier Pairing Compatibility for sEMG Signals in Hand Gesture Recognition under Joint Effects of Processing Procedures,
M. Asfour, C. Menon, and X. Jiang, “Feature–Classifier Pairing Compatibility for sEMG Signals in Hand Gesture Recognition under Joint Effects of Processing Procedures,”Bioengineering, vol. 9, no. 11, p. 634, 2022. [Online]. Available: https://doi.org/10.3390/ bioengineering9110634
2022
-
[31]
Embedded restricted boltzmann machine approach for adjustments of repetitive physical activities using imu data,
M. Alencar, R. Barreto, H. Oliveira, and E. Souto, “Embedded restricted boltzmann machine approach for adjustments of repetitive physical activities using imu data,”IEEE Embedded Systems Letters, vol. 16, no. 2, pp. 102–105, Jun. 2024
2024
-
[32]
Measurement accuracy of an upper limb tracking system based on two hillcrest labs bno080 imu sensors: An environmental assessment,
R. Stanzani, P. Dondero, A. Mantero, and M. Testa, “Measurement accuracy of an upper limb tracking system based on two hillcrest labs bno080 imu sensors: An environmental assessment,”IEEE Sensors Journal, vol. 20, no. 17, pp. 10 267–10 274, Sep. 2020
2020
-
[33]
Imu sensors mea- surements towards the development of novel prosthetic arm control strategies,
R. Galviati, N. Boccardo, M. Canepa, D. Di Domenico, A. Marinelli, C. A. Frigo, M. Laffranchi, and L. de Michieli, “Imu sensors mea- surements towards the development of novel prosthetic arm control strategies,” inProceedings of the IEEE International Conference on Rehabilitation Robotics (ICORR), Sep. 2023, pp. 1–6, pMID: 37941218
2023
-
[34]
Real-time classification of multi-modal sensory data for prosthetic hand control,
I. Kyranou, A. Krasoulis, M. S. Erden, K. Nazarpour, and S. Vijayaku- mar, “Real-time classification of multi-modal sensory data for prosthetic hand control,” in2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 2016, pp. 536–541
2016
-
[35]
Exploring the Potential of Computer Vision and Machine Learning in Enhancing the Functionality of an EMG-Controlled Pros- thetic Hand,
J. Odeyemi, “Exploring the Potential of Computer Vision and Machine Learning in Enhancing the Functionality of an EMG-Controlled Pros- thetic Hand,” Master’s thesis, Memorial University of Newfoundland, St. John’s, NL, Canada, Aug. 2023
2023
-
[36]
Investigating the impact of training protocols on myoelectric pattern recognition control in upper-limb amputees,
E. Mohammadreza, V . P. D. Fonseca, and X. Jiang, “Investigating the impact of training protocols on myoelectric pattern recognition control in upper-limb amputees,”IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 33, pp. 1338–1348, 2025, epub 2025 Apr 14
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.