Data-Driven Robust MPC for Unknown Nonlinear Systems via Set-Membership Learning
Pith reviewed 2026-06-25 23:07 UTC · model grok-4.3
The pith
Unknown nonlinear systems can be robustly controlled with data-driven min-max MPC that learns set-membership uncertainty bounds from noisy input-state data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
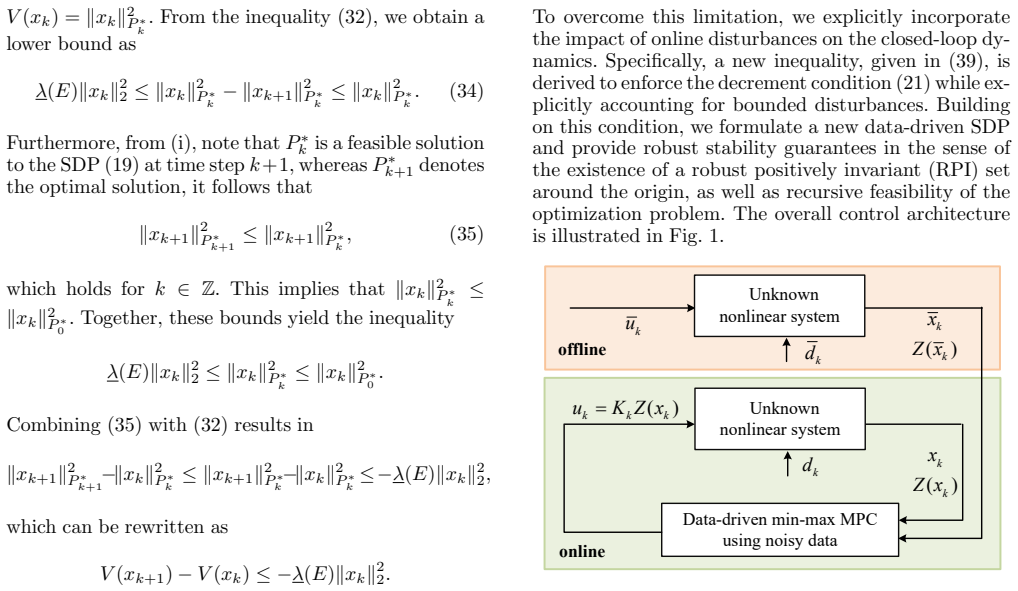
By representing the unknown nonlinear dynamics in an equivalent linear form whose matrices are characterized by a set-membership set derived from noisy input-state data, a min-max MPC problem can be solved via a Lyapunov-based semidefinite program to obtain a state-feedback controller that guarantees recursive feasibility of the optimization and either exponential or robust closed-loop stability depending on the presence of process disturbances.
What carries the argument
The set-membership description of the unknown system matrices obtained from noisy data, which supplies the uncertainty set for the min-max MPC problem solved by a Lyapunov-based semidefinite program.
If this is right
- The optimization remains recursively feasible at every time step.
- Exponential stability of the closed loop is obtained when process disturbances are absent.
- Robust stability of the closed loop is obtained when process disturbances are present.
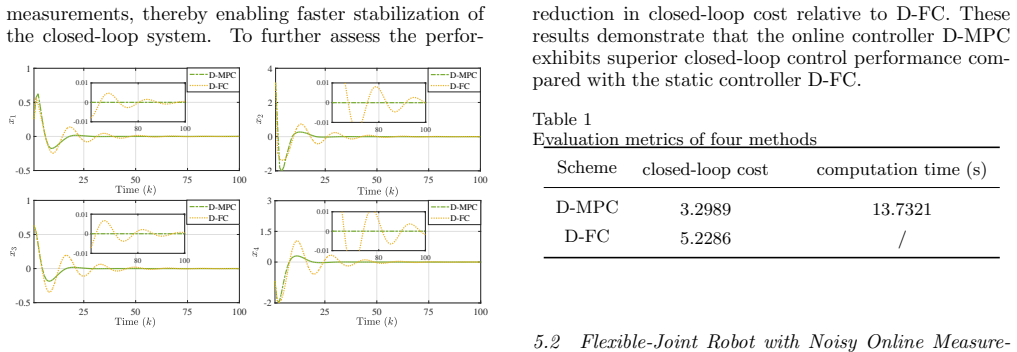
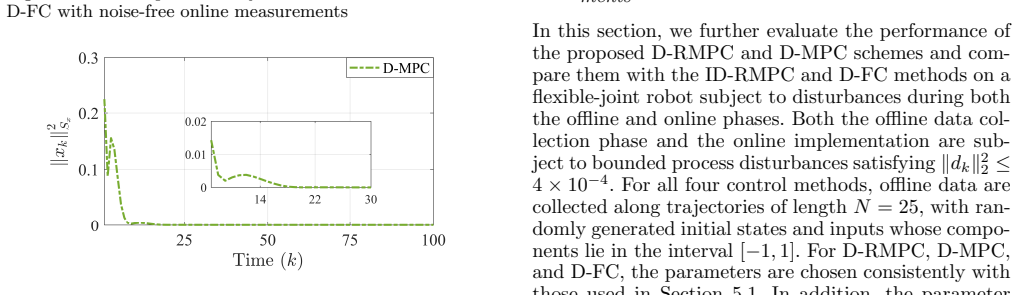
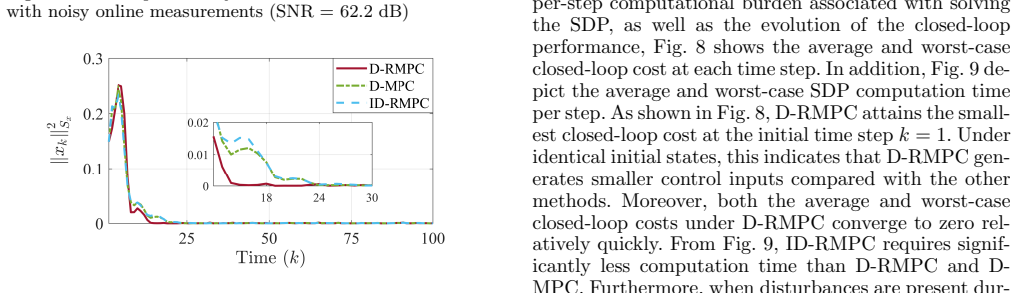
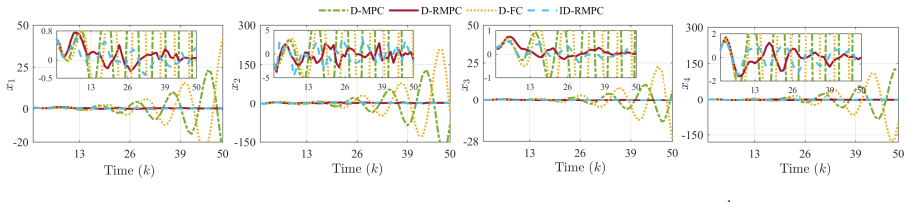
- The controller exhibits competitive performance relative to existing data-driven and model-based methods on benchmark examples.
Where Pith is reading between the lines
- The same set-membership construction could be used to incorporate partial prior knowledge by fixing some matrix entries while learning the rest.
- Online SDP solves may restrict the method to systems whose sampling period allows sufficient computation time unless warm-starting or faster solvers are added.
- The approach suggests a route to adaptive control by periodically refreshing the set-membership description as new data arrive.
Load-bearing premise
The unknown nonlinear dynamics can be exactly represented in an equivalent linear form using vector fields built from a chosen dictionary of basis functions, allowing the unknown matrices to be fully characterized by a set-membership description derived from noisy input-state data.
What would settle it
A simulation or experiment in which the true dynamics lie outside the computed set-membership bounds, causing the closed-loop trajectory to violate recursive feasibility or lose stability despite the SDP conditions being satisfied.
Figures








read the original abstract
Data-driven model predictive control (MPC) has become an attractive approach for controlling unknown systems, especially when data are corrupted by noise. However, most existing data-driven MPC methods focus on linear systems, and little attention has been given to nonlinear dynamics under disturbances. To fill this gap, we propose a robust data-driven min-max MPC scheme for unknown nonlinear systems with process disturbances. We represent the unknown nonlinear dynamics using vector fields built from a dictionary of basis functions, yielding an equivalent linear form with unknown matrices. These unknown matrices are characterized by a set-membership representation derived from noisy input-state data. Using this uncertainty description, we formulate a min-max MPC problem. Two online scenarios are studied: i) when state measurements are noise-free, and, ii) when they are corrupted by process disturbance. For each case, we derive a Lyapunov-based semidefinite program (SDP) to compute a stabilizing state-feedback controller. The resulting schemes are shown to guarantee recursive feasibility and either exponential or robust stability of the closed-loop system depending on whether there is process disturbance. Simulation studies on benchmark examples illustrate the effectiveness and competitive performance of the proposed approach compared to existing data-driven and model-based controllers.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a data-driven robust min-max MPC scheme for unknown nonlinear systems with process disturbances. It represents the dynamics in an equivalent linear form via a chosen dictionary of basis functions, derives a set-membership uncertainty description of the unknown matrices from noisy input-state data, formulates an online min-max MPC problem, and supplies Lyapunov-based SDP solutions for a stabilizing state-feedback controller in two measurement scenarios. The schemes are claimed to ensure recursive feasibility together with exponential stability (noise-free case) or robust stability (disturbed case).
Significance. If the exact linear parametrization holds and the SDP certificates are valid, the approach would provide a tractable data-driven route to robust MPC for nonlinear systems under disturbances, extending existing linear data-driven methods while retaining stability guarantees via set-membership learning. The use of SDP-based controllers and explicit feasibility/stability proofs would be a concrete strength if the representation assumption can be certified.
major comments (2)
- [Abstract / model representation] Abstract and model-representation section: the central claim that the unknown nonlinear dynamics admit an 'equivalent linear form' with matrices fully characterized by set-membership sets derived from data requires that the true vector field lies exactly in the span of the chosen basis functions. No verifiable conditions on the dictionary, no procedure to certify exactness from data, and no discussion of the consequences when the assumption fails are supplied; without these the robust MPC problem is not guaranteed to be a valid over-approximation and the Lyapunov SDP certificates do not apply to the real closed-loop system.
- [Abstract / stability analysis] Stability and recursive-feasibility claims (abstract): these rest on the min-max MPC formulation whose uncertainty set is obtained under the exact-representation assumption. When the dictionary is incomplete the true dynamics lie outside every matrix set consistent with the data, so the derived SDP certificates and feasibility arguments no longer bound the actual nonlinear closed-loop behavior; the paper provides no sensitivity analysis or fallback when this occurs.
minor comments (2)
- Notation for the basis-function dictionary and the resulting matrix sets should be introduced with explicit dimensions and an example in the main text rather than only in the appendix.
- The two online scenarios (noise-free vs. disturbed measurements) are distinguished clearly in the abstract but the corresponding SDP formulations would benefit from a side-by-side comparison table of the decision variables and constraints.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major comment below and propose revisions where appropriate to clarify the scope and limitations of the approach.
read point-by-point responses
-
Referee: [Abstract / model representation] Abstract and model-representation section: the central claim that the unknown nonlinear dynamics admit an 'equivalent linear form' with matrices fully characterized by set-membership sets derived from data requires that the true vector field lies exactly in the span of the chosen basis functions. No verifiable conditions on the dictionary, no procedure to certify exactness from data, and no discussion of the consequences when the assumption fails are supplied; without these the robust MPC problem is not guaranteed to be a valid over-approximation and the Lyapunov SDP certificates do not apply to the real closed-loop system.
Authors: We acknowledge that the proposed framework assumes the nonlinear dynamics admit an exact linear parametrization in the chosen dictionary of basis functions. This assumption is standard in approximation-based nonlinear control but is indeed central to the validity of the uncertainty sets and subsequent guarantees. In the revised manuscript, we will add explicit discussion in the model representation section stating the assumption, noting that no general finite-data certification procedure is provided (as verifying exact span membership from noisy data alone is generally intractable without additional system knowledge), and outlining the consequences of violation (the true dynamics may lie outside the computed sets, rendering the robust MPC and SDP certificates inapplicable to the actual system). revision: yes
-
Referee: [Abstract / stability analysis] Stability and recursive-feasibility claims (abstract): these rest on the min-max MPC formulation whose uncertainty set is obtained under the exact-representation assumption. When the dictionary is incomplete the true dynamics lie outside every matrix set consistent with the data, so the derived SDP certificates and feasibility arguments no longer bound the actual nonlinear closed-loop behavior; the paper provides no sensitivity analysis or fallback when this occurs.
Authors: The stability and recursive feasibility results are derived under the exact-representation assumption, as stated in the problem formulation and analysis sections. We agree that no sensitivity analysis or fallback is provided for dictionary incompleteness. In revision, we will insert a remark in the stability analysis section explicitly conditioning the guarantees on the assumption and recommending dictionary selection via domain knowledge. Developing a general sensitivity analysis or fallback would require quantifying representation error, which lies outside the current set-membership framework focused on exact parametrization. revision: partial
- A general, verifiable procedure to certify exact dictionary representation from finite noisy data without additional prior knowledge of the system dynamics.
Circularity Check
No significant circularity; derivation is self-contained under stated assumptions
full rationale
The paper assumes the unknown nonlinear dynamics admit an exact equivalent linear parametrization via a chosen finite dictionary of basis functions, obtains a set-membership description of the unknown matrices from noisy input-state data, and then derives a min-max MPC formulation together with Lyapunov-based SDP certificates for recursive feasibility and exponential/robust stability. No equations or steps in the provided text reduce a claimed prediction or stability result to a fitted parameter or self-citation by construction. The load-bearing assumption is external to the derivation chain rather than tautological, and no self-citation load-bearing or ansatz smuggling is exhibited.
Axiom & Free-Parameter Ledger
free parameters (1)
- Basis function dictionary
axioms (2)
- standard math Lyapunov-based SDP yields a stabilizing controller for the uncertain linear system
- domain assumption Set-membership representation from noisy data accurately bounds all possible system matrices
Reference graph
Works this paper leans on
-
[1]
IEEE/CAA J
Data-driven control of distributed event-triggered network systems , author=. IEEE/CAA J. Autom. Sinica, , volume=
-
[2]
Li and X
Y. Li and X. Wang and J. Sun and G. Wang and J. Chen , title =. Sci. China Inf. Sci. , volume=
-
[3]
Automatica , volume=
Low-complexity learning of linear quadratic regulators from noisy data , author=. Automatica , volume=
-
[4]
Causality-informed data-driven predictive control , author=. arXiv:2311.09545 , year=
-
[5]
Automatica , volume=
State estimation using a network of distributed observers with unknown inputs , author=. Automatica , volume=. 2022 , publisher=
2022
-
[6]
Automatica , volume=
State estimation using a network of distributed observers with switching communication topology , author=. Automatica , volume=. 2022 , publisher=
2022
-
[7]
, publisher=
Hou, Z., and Jin, S. , publisher=
-
[8]
, publisher=
Scherer, C., and Weiland, S. , publisher=
-
[9]
Horn and C.R
R.A. Horn and C.R. Johnson. Matrix Analysis. 1985
1985
-
[10]
IEEE Trans
Formulas for Data-Driven Control:. IEEE Trans. Autom. Control , volume=. 2020 , publisher=
2020
-
[11]
A note on persistency of excitation , author=. Syst. Control Lett. , volume=. 2005 , publisher=
2005
-
[12]
IEEE Trans
Data-driven model predictive control with stability and robustness guarantees , author=. IEEE Trans. Autom. Control , volume=. 2020 , publisher=
2020
-
[13]
IEEE Trans
Dead-Beat Control in the Behavioral Approach , author=. IEEE Trans. Autom. Control , volume=. 2012 , publisher=
2012
-
[14]
and Wang, G
Zhou, Z. and Wang, G. and Sun, J. and Wang, J. and Chen, J. , journal=. Efficient and Robust Time-Optimal Trajectory Planning and Control for Agile Quadrotor Flight , year=
-
[15]
IEEE Trans
Data-driven resilient predictive control under Denial-of-Service , author=. IEEE Trans. Autom. Control , volume=. 2023 , publisher=
2023
-
[16]
IEEE Trans
Data-driven Self-triggered Control via Trajectory Prediction , author=. IEEE Trans. Autom. Control , volume=. 2023 , publisher=
2023
-
[17]
Control Theory Technol
Distributed data-driven consensus control of multi-agent systems under switched uncertainties , author=. Control Theory Technol. , volume=. 2023 , publisher=
2023
-
[18]
and Wang, G
Liu, W. and Wang, G. and Sun, J. and Bullo, F. and Chen, J. , journal=. Learning Robust Data-Based. 2024 , volume=
2024
-
[19]
IEEE Control Syst
Alpago, Daniele and D. IEEE Control Syst. Lett. , volume=. 2020 , publisher=
2020
-
[20]
Robust constraint satisfaction in data-driven
Berberich, Julian and K\". Robust constraint satisfaction in data-driven. Proc. of IEEE Conf. on Decis. and Control , pages=. Dec. 14-18, 2020 , address=
2020
-
[21]
Data-based moving horizon estimation for linear discrete-time systems , author=. Proc. Eur. Control Conf. , pages=. 2022 , address=
2022
-
[22]
IEEE Trans
Robust Data-Driven Moving Horizon Estimation for Linear Discrete-Time Systems , author=. IEEE Trans. Autom. Control , volume=. 2024 , publisher=
2024
-
[23]
and De Persis, Claudio and Camlibel, M
van Waarde, Henk J. and De Persis, Claudio and Camlibel, M. Kanat and Tesi, Pietro , journal=. Willems’ Fundamental Lemma for State-Space Systems and Its Extension to Multiple Datasets , volume=. 2020 , publisher=
2020
-
[24]
Van Waarde, H. J. and Camlibel, M. K. and Mesbahi, M. , journal=. From Noisy Data to Feedback Controllers: Nonconservative Design via a Matrix S-Lemma , volume=. 2022 , publisher=
2022
-
[25]
IEEE Control Syst
Data-driven unknown-input observers and state estimation , author=. IEEE Control Syst. Lett. , volume=. 2021 , publisher=
2021
-
[26]
IEEE Trans
On the equivalence of model-based and data-driven approaches to the design of unknown-input observers , author=. IEEE Trans. Autom. Control , volume=. 2025 , publisher=
2025
-
[27]
and Lygeros, J
Coulson, J. and Lygeros, J. and D. Eur. Control Conf. , title=. 2019 , volume=
2019
-
[28]
IEEE Trans
Input-to-State Stabilizing Control under Denial-of-Service , author=. IEEE Trans. Autom. Control , volume=. 2015 , month =
2015
-
[29]
Lewis, Frank L and Zhang, Hongwei and Hengster-Movric, Kristian and Das, Abhijit , publisher=
-
[30]
Devore, J. L. and Berk, K. N. , publisher=
-
[31]
Khalil, H. K. Nonlinear Systems. 1996
1996
-
[32]
Lofberg , booktitle=
J. Lofberg , booktitle=. 2004 , volume=
2004
-
[33]
J. B. Rawlings and D. Q. Mayne and M. M. Diehl , publisher=
-
[34]
Boyd and L.E
S. Boyd and L.E. Ghaoui and E. Feron and V. Balakrishnan , publisher=
-
[35]
Security Metrics of Networked Control Systems under Sensor Attacks (extended preprint)
Security Metrics of Networked Control Systems under Sensor Attacks , author=. arXiv:1809.01808 , month =. 2019 , publisher=
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[36]
Data-Driven Min-Max. Proc. of Amer. Control Conf. , pages=. 2024 , address=
2024
-
[37]
Distributed Data-driven Unknown-input Observers for State Estimation , author=. arXiv:2401.04660 , month =. 2023 , publisher=
-
[38]
IEEE Trans
Min-max control of constrained uncertain discrete-time linear systems , author=. IEEE Trans. Autom. Control , volume=. 2003 , month =
2003
-
[39]
Automatica , volume=
Robust constrained model predictive control using linear matrix inequalities , author=. Automatica , volume=. 1996 , month =
1996
-
[40]
Mayne, D. Q. and Rawlings, J. B. and Rao, C. V. and Scokaert, P. O. M. , journal =. Constrained model predictive control:. 2000 , month =
2000
-
[41]
Model predictive control: past, present and future , author=. Comput. Chem. Eng. , volume=. 1999 , month =
1999
-
[42]
Automatica , volume=
Robust output feedback model predictive control of constrained linear systems , author=. Automatica , volume=. 2006 , month =
2006
-
[43]
IEEE Trans
Min-max feedback model predictive control for constrained linear systems , author=. IEEE Trans. Autom. Control , volume=. 1998 , month =
1998
-
[44]
Automatica , volume=
Robust model predictive control of constrained linear systems with bounded disturbances , author=. Automatica , volume=. 2005 , month =
2005
-
[45]
Automatica , volume=
Homothetic tube model predictive control , author=. Automatica , volume=
-
[46]
IEEE Trans
Parameterized tube model predictive control , author=. IEEE Trans. Autom. Control , volume=
-
[47]
and Farrokhi, M
Heydari, R. and Farrokhi, M. , journal=. Robust tube-based model predictive control of
-
[48]
Automatica , volume=
An efficient off-line formulation of robust model predictive control using linear matrix inequalities , author=. Automatica , volume=
-
[49]
On input-to-state stability of min–max nonlinear model predictive control , author=. Syst. Control Lett. , volume=
-
[50]
Output-feedback predictive control of constrained linear systems via set-membership state estimation , author=
-
[51]
Robust output feedback model predictive control using off-line linear matrix inequalities , author=. J. Process Control , volume=
-
[52]
Automatica , volume=
Incorporating state estimation into model predictive control and its application to network traffic control , author=. Automatica , volume=
-
[53]
Acta Anat
Synthesizing output feedback predictive control for constrained uncertain time-varying discrete systems , author=. Acta Anat. Sin. , volume=
-
[54]
Synthesis of dynamic output feedback
Li, Dewei and Xi, Yugeng and Gao, Furong , journal=. Synthesis of dynamic output feedback
-
[55]
Automatica , volume=
A synthesis approach for output feedback robust constrained model predictive control , author=. Automatica , volume=
-
[56]
and Ding, B
Hu, J. and Ding, B. , journal=. Output feedback robust
-
[57]
Output feedback robust
Ping, Xubin , journal=. Output feedback robust
-
[58]
and Liu, T
Hu, K. and Liu, T. , booktitle=. Data-driven. 2022 , address=
2022
-
[59]
Robust data-driven predictive control for unknown linear time-invariant systems , author=. Syst. Control Lett. , volume=
-
[60]
Xie and J
Y. Xie and J. Berberich and F. Allg\". Data-Driven Min-Max. Automatica , volume=. 2026 , month =
2026
-
[61]
Xie, Y. and Berberich, J. and Br\". Data-Driven Min-Max MPC for. arXiv:2411.05624 , year=
-
[62]
, publisher=
Woodbury, M.A. , publisher=
-
[63]
IEEE Trans
Robust Stability Analysis of a Simple Data-Driven Model Predictive Control Approach , author=. IEEE Trans. Autom. Control , volume=
-
[64]
IEEE Trans
Path-following control of an AUV: A multiobjective model predictive control approach , author=. IEEE Trans. Control Syst. Technol. , volume=
-
[65]
Robust model predictive control: reflections and opportunities , author=. J. Control and Decis. , volume=
-
[66]
and Arkun, Y
Lu, Y. and Arkun, Y. , journal=. Quasi-Min-Max
-
[67]
A scheduling quasi–min-max model predictive control algorithm for nonlinear systems , author=. J. Process Control , volume=
-
[68]
IEEE Trans
Robust Min-Max Model Predictive Vehicle Platooning With Causal Disturbance Feedback , author=. IEEE Trans. Intell. Transp. Syst , volume=
-
[69]
A data-driven approach to
Giulio, Fattore and Maria, Elena Valcher , journal=. A data-driven approach to. 2024 , month =
2024
-
[70]
Behavioral systems theory in data-driven analysis, signal processing, and control , author=. Annu. Rev. Control , volume=
-
[71]
Data-Enabled Predictive Control for Grid-Connected Power Converters , author=. Proc. of IEEE Conf. on Decis. and Control , pages=. 2019 , address=
2019
-
[72]
Regularized and Distributionally Robust Data-Enabled Predictive Control , author=. Proc. of IEEE Conf. on Decis. and Control , pages=. 2019 , address=
2019
-
[73]
A data-driven predictive controller design based on reduced
Yang, Hua and Li, Shaoyuan , booktitle=. A data-driven predictive controller design based on reduced. 2015 , address=
2015
-
[74]
Elkhatem, A. S. and Engin, S. N. , journal=. Robust
-
[75]
IEEE Trans
Nonlinear Model Predictive Formation Flight , author=. IEEE Trans. Syst. Man Cybern.: Syst. , volume=
-
[76]
Data-enabled predictive control for quadcopters , author=. Int. J. Robust Nonlinear Control , volume=
-
[77]
A novel constraint-tightening approach for robust data-driven predictive control , author=. Int. J. Robust Nonlinear Control , volume=
-
[78]
and You, K
Wang, Y. and You, K. and Huang, D. and Shang, C. , journal=. Data-driven output prediction and control of stochastic systems:
-
[79]
IEEE Control Syst
Data-Driven Tracking Control for Uncertain Linear Systems Using a Dual-System Approach , author=. IEEE Control Syst. Lett. , volume=
-
[80]
and Van Delft, A
Mastellone, S. and Van Delft, A. , journal=. The impact of control research on industrial innovation:
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.