Human-Robot Shared Control for Humanized End-Effector Teleoperation
Pith reviewed 2026-06-25 22:09 UTC · model grok-4.3
The pith
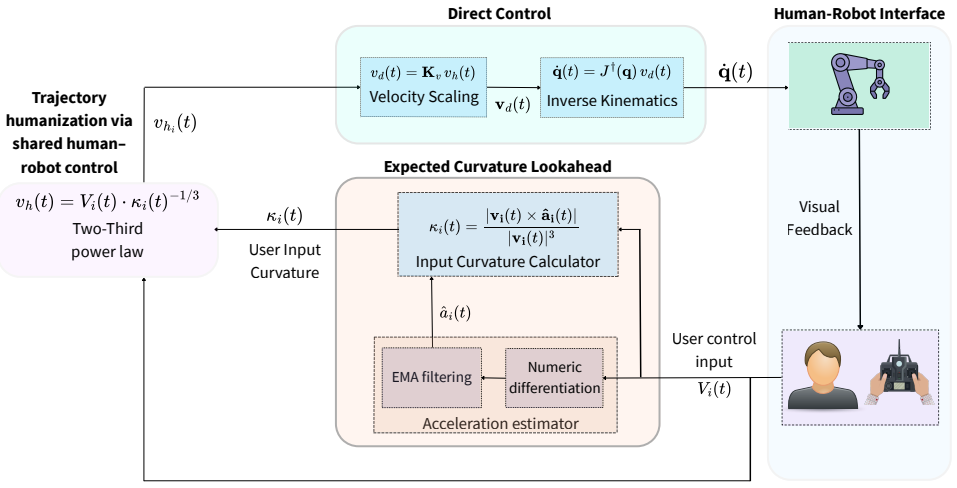
A shared-control framework reshapes teleoperated robot end-effector paths in real time to follow the two-thirds power law of human hand motion.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By embedding the two-thirds power law into a shared controller, the generated end-effector trajectories move the estimated beta coefficient 39.7 percent closer on average to the theoretical value of one-third, while cutting RMS torque rate by approximately 34 percent; eighty percent of tested motion patterns reach statistical significance for the smoothness gain, and task completion times stay comparable to conventional teleoperation.
What carries the argument
The two-thirds power law, which relates tangential velocity of voluntary human movements to the radius of curvature raised to the one-third power; it supplies the real-time reshaping rule that the shared controller applies to incoming operator commands.
If this is right
- Teleoperated six-degree-of-freedom arms can produce end-effector paths whose kinematic profiles align more closely with human voluntary movement.
- Motion smoothness, quantified by RMS torque rate, improves in the majority of evaluated patterns while task duration remains essentially unchanged.
- The same real-time reshaping approach can be implemented on physical hardware without requiring additional sensors or actuators beyond standard teleoperation interfaces.
Where Pith is reading between the lines
- The method might be combined with other anthropomorphic cues such as compliant joint behavior to further increase perceived naturalness of the robot.
- Operators could receive implicit training benefits because the robot's response already embodies human-like speed-curvature relations.
- Similar reshaping rules could be tested on mobile bases or multi-arm systems where end-effector paths must remain legible to nearby humans.
Load-bearing premise
Real-time reshaping of trajectories according to the two-thirds power law preserves the operator's intended control inputs and does not introduce task-relevant distortions.
What would settle it
A controlled comparison in which the beta coefficient after reshaping fails to move measurably closer to one-third, or the RMS torque rate reduction falls well below the reported 34 percent across repeated trials on the same arm and tasks.
Figures
read the original abstract
Recent advances in robotics have enabled robots to operate in shared human environments, emphasizing the importance of effective human robot interaction HRI. Prior studies indicate that anthropomorphism, defined as the incorporation of human like features into robotic systems, facilitates more natural interaction and enhances both task performance and user experience. In robotic arm teleoperation, however, user controlled motions often deviate from human like kinematic characteristics due to intrinsic limitations of teleoperation systems. In this work, we propose a real time framework that generates human like end effector trajectories based on the two thirds power law of voluntary human hand movements, while preserving the operators intended control inputs. The proposed approach is validated through real world experiments conducted on a 6 degree of freedom Dobot CR10 robotic arm. Quantitative analysis demonstrates that the generated trajectories exhibit significantly stronger adherence to human like kinematic profiles compared to conventional teleoperation, with the estimated beta coefficient moving 39.7% closer on average to the theoretical value of 1/3. Furthermore, the method achieves an approximate 34% improvement in motion smoothness, measured by RMS torque rate reduction, with 80% of evaluated motion patterns showing statistically significant improvements while maintaining comparable task completion times.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a real-time shared-control framework for 6-DoF end-effector teleoperation that reshapes trajectories to enforce closer adherence to the two-thirds power law of human motion while claiming to preserve the operator’s intended inputs. Experiments on a Dobot CR10 report that the estimated beta moves 39.7 % closer to the theoretical 1/3 value, RMS torque rate drops ~34 %, 80 % of motion patterns show statistically significant improvement, and task-completion times remain comparable.
Significance. If the preservation of intended position/velocity trajectories can be demonstrated with quantitative deviation metrics, the method would address a recognized limitation of conventional teleoperation and could improve perceived naturalness in HRI without performance penalty. The use of real hardware trials is a positive feature, but the absence of the reshaping operator and supporting statistics limits the strength of the current claims.
major comments (3)
- [Abstract] Abstract: the reshaping operator itself is never specified—no equations, projection, optimization, or filtering formulation is given for how the real-time modification is performed while still preserving intended control inputs.
- [Abstract] Abstract: no per-trial position or velocity deviation metrics (e.g., path error, velocity profile difference) between the operator’s raw commands and the reshaped trajectories are reported, so the central premise that intended inputs remain essentially unchanged cannot be evaluated even when task times match.
- [Abstract] Abstract: methodological details required to interpret the quantitative results are missing—participant numbers, exact procedure for estimating beta, formula used for RMS torque rate, and the statistical test plus correction method supporting the “80 % of evaluated motion patterns” claim.
minor comments (2)
- [Abstract] Abstract: repeated hyphenation errors (“human like”, “human-robot”) and undefined acronym on first use (“HRI”).
- [Abstract] Abstract: the phrase “significantly stronger adherence” should be accompanied by the actual p-values or effect sizes rather than only the percentage improvement in beta.
Simulated Author's Rebuttal
We thank the referee for the constructive comments highlighting areas where the abstract can be strengthened for clarity. We address each major comment below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: the reshaping operator itself is never specified—no equations, projection, optimization, or filtering formulation is given for how the real-time modification is performed while still preserving intended control inputs.
Authors: We agree the abstract lacks a description of the reshaping operator. The full manuscript details the real-time framework in the methods, but to address this concern we will revise the abstract to include a concise statement of the operator (e.g., the projection onto the two-thirds power-law manifold) and how it preserves intended inputs. revision: yes
-
Referee: [Abstract] Abstract: no per-trial position or velocity deviation metrics (e.g., path error, velocity profile difference) between the operator’s raw commands and the reshaped trajectories are reported, so the central premise that intended inputs remain essentially unchanged cannot be evaluated even when task times match.
Authors: The abstract does not report per-trial deviation metrics. We will add quantitative measures (path error and velocity profile difference) between raw and reshaped trajectories to the revised abstract and results to allow direct evaluation of input preservation. revision: yes
-
Referee: [Abstract] Abstract: methodological details required to interpret the quantitative results are missing—participant numbers, exact procedure for estimating beta, formula used for RMS torque rate, and the statistical test plus correction method supporting the “80 % of evaluated motion patterns” claim.
Authors: These details are omitted from the abstract for brevity. We will expand the abstract to report participant count, beta estimation procedure, RMS torque rate formula, and the statistical test with correction supporting the 80 % claim. revision: yes
Circularity Check
Adherence to 2/3 power law (beta closer to 1/3) is enforced by the generation method itself
specific steps
-
self definitional
[Abstract]
"we propose a real time framework that generates human like end effector trajectories based on the two thirds power law of voluntary human hand movements, while preserving the operators intended control inputs. [...] the generated trajectories exhibit significantly stronger adherence to human like kinematic profiles compared to conventional teleoperation, with the estimated beta coefficient moving 39.7% closer on average to the theoretical value of 1/3"
The framework is explicitly constructed to generate trajectories based on the power law; therefore the measured beta moving closer to 1/3 is enforced by the generation rule rather than discovered or validated independently of the method definition.
full rationale
The paper's central quantitative claim is that generated trajectories show beta 39.7% closer to the theoretical 1/3 value. However, the method is defined as generating trajectories 'based on the two thirds power law', so the reported improvement in adherence is a direct consequence of the reshaping construction rather than an independent empirical outcome. Other reported metrics (smoothness, task time) do not reduce to the input by construction, but the load-bearing kinematic-profile claim does. This matches the self-definitional pattern with one clear reduction; the remainder of the validation chain remains non-circular.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The two-thirds power law governs voluntary human hand movements and can be used to generate human-like robot trajectories
Reference graph
Works this paper leans on
-
[1]
S. B. Niku,Introduction to robotics: analysis, control, applications. John Wiley & Sons, 2020
2020
-
[2]
Human-robot interaction: Applications,
A.-N. Sharkawy, “Human-robot interaction: Applications,”arXiv preprint arXiv:2102.00928, 2021
arXiv 2021
-
[3]
Floor cleaning robot with reconfigurable mechanism,
V . Prabakaran, M. R. Elara, T. Pathmakumar, and S. Nansai, “Floor cleaning robot with reconfigurable mechanism,”Automation in Con- struction, vol. 91, pp. 155–165, 2018
2018
-
[4]
A guide robot at the airport: First impres- sions,
M. Joosse and V . Evers, “A guide robot at the airport: First impres- sions,” inProceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction (HRI 2017). ACM/IEEE, 2017, pp. 149–150
2017
-
[5]
Adaptive behavior generation for social robots using reinforcement learning,
J. Li, S. Wang, Y . Wang, and H. Liu, “Adaptive behavior generation for social robots using reinforcement learning,” in2016 IEEE Inter- national Conference on Robotics and Biomimetics (ROBIO). IEEE, 2016, pp. 1625–1630
2016
-
[6]
Recent advancements in multimodal human–robot interaction,
H. Su, W. Qi, J. Chen, C. Yang, J. Sandoval, and M. A. Laribi, “Recent advancements in multimodal human–robot interaction,”Frontiers in Neurorobotics, vol. 17, p. 1084000, 2023
2023
-
[7]
Trust and trustworthiness from human-centered perspec- tive in human–robot interaction (hri)—a systematic literature review,
D. Firmino de Souza, S. Sousa, K. Kristjuhan-Ling, O. Duna- jeva, M. Roosileht, A. Pentel, M. M ˜ottus, M. Can ¨Ozdemir, and ˇZ. Gratˇsjova, “Trust and trustworthiness from human-centered perspec- tive in human–robot interaction (hri)—a systematic literature review,” Electronics, vol. 14, no. 8, p. 1557, 2025
2025
-
[8]
Planning with trust for human-robot collaboration,
M. Chen, S. Nikolaidis, H. Soh, D. Hsu, and S. S. Srinivasa, “Planning with trust for human-robot collaboration,” inProceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction (HRI). ACM/IEEE, 2018, pp. 307–315
2018
-
[9]
A review on human–robot trust in home service robots,
H. B. Balcha, P. Rauffet, G. M. Wegari, and C. Buche, “A review on human–robot trust in home service robots,”ACM Transactions on Human-Robot Interaction, vol. 14, no. 4, pp. 1–19, 2025
2025
-
[10]
Explain yourself! effects of explanations in human–robot interaction,
F. de Rosis, R. Rizzo, C. Pelachaud, I. Poggi, and F. D’Errico, “Explain yourself! effects of explanations in human–robot interaction,” inProceedings of the 31st IEEE International Conference on Robot and Human Interactive Communication (RO-MAN 2002). IEEE, 2002, pp. 199–204
2002
-
[11]
Robovie: An interactive humanoid robot,
H. Ishiguro, T. Ono, M. Imai, T. Maeda, T. Kanda, and R. Nakatsu, “Robovie: An interactive humanoid robot,”Industrial Robot: An International Journal, vol. 28, no. 6, pp. 498–503, 2001
2001
-
[12]
Deception in hri and its implications: A systematic review,
R. Esposito, A. Rossi, and S. Rossi, “Deception in hri and its implications: A systematic review,”ACM Transactions on Human- Robot Interaction, vol. 14, no. 3, pp. 47:1–47:26, 2025
2025
-
[13]
Generating human-like motion for robots,
M. J. Gielniak, C. K. Liu, and A. L. Thomaz, “Generating human-like motion for robots,”The International Journal of Robotics Research, vol. 32, no. 11, pp. 1275–1301, 2013
2013
-
[14]
Robotic assistants in human environ- ments: Supporting user autonomy,
A. L. Thomaz and C. Breazeal, “Robotic assistants in human environ- ments: Supporting user autonomy,” inSpringer Handbook of Robotics, B. Siciliano and O. Khatib, Eds. Springer, 2016, pp. 567–589
2016
-
[15]
D. A. Rosenbaum,Human motor control. Academic press, 2009
2009
-
[16]
Adaptive environment-aware robotic arm reaching based on a bio- inspired neurodynamical computational framework,
D. Chatziparaschis, S. Zhong, V . Christopoulos, and K. Karydis, “Adaptive environment-aware robotic arm reaching based on a bio- inspired neurodynamical computational framework,” in2024 33rd IEEE International Conference on Robot and Human Interactive Communication (RO-MAN). IEEE, 2024, pp. 510–515
2024
-
[17]
Human-inspired robotic grasp control with tactile sensing,
J. M. Romano, K. Hsiao, G. Niemeyer, S. Chitta, and K. J. Kuchen- becker, “Human-inspired robotic grasp control with tactile sensing,” IEEE Transactions on Robotics, vol. 27, no. 6, pp. 1067–1079, 2011
2011
-
[18]
Bio-inspired robot locomotion,
T. Buschmann and B. Trimmer, “Bio-inspired robot locomotion,” in Neurobiology of Motor Control, S.-J. Keshner and R. L. Fogelson, Eds. John Wiley & Sons, 2017, pp. —
2017
-
[19]
Legibility of robot behavior: A literature review,
C. Lichtenth ¨aler and A. Kirsch, “Legibility of robot behavior: A literature review,” HAL Archives Ouvertes, Tech. Rep., 2016
2016
-
[20]
Human-robot interaction: Designing intuitive interfaces for automation,
A. Khan, “Human-robot interaction: Designing intuitive interfaces for automation,”Frontiers in Robotics and Automation, vol. 1, no. 2, pp. 89–110, 2024
2024
-
[21]
Contact force control of robot polishing system based on vision control algorithm,
K. Liu, “Contact force control of robot polishing system based on vision control algorithm,”IEEE Access, vol. 12, pp. 137 926–137 941, 2024
2024
-
[22]
Au- tonomous and teleoperation control of a drawing robot avatar,
L. Chen, A. Naceri, A. Swikir, S. Hirche, and S. Haddadin, “Au- tonomous and teleoperation control of a drawing robot avatar,”arXiv preprint arXiv:2407.20156, 2024
arXiv 2024
-
[23]
Bilateral teleoperation of multiple co- operative robots over delayed communication networks: Theory,
D. Lee and M. W. Spong, “Bilateral teleoperation of multiple co- operative robots over delayed communication networks: Theory,” in Proceedings of the 2005 IEEE International Conference on Robotics and Automation (ICRA). Barcelona, Spain: IEEE, 2005, pp. 360–365
2005
-
[24]
The law relating the kine- matic and figural aspects of drawing movements,
F. Lacquaniti, C. Terzuolo, and P. Viviani, “The law relating the kine- matic and figural aspects of drawing movements,”Acta psychologica, vol. 54, no. 1-3, pp. 115–130, 1983
1983
-
[25]
Dobot cr10 collaborative robot,
“Dobot cr10 collaborative robot,” https://www.dobot- robots.com/products/cr-series/cr10.html, Dobot Robotics, 2026, 40 kg weight, 10 kg payload, 1525 mm reach, collaborative robot arm platform
2026
-
[26]
Shared control for teleoperation enhanced by autonomous obstacle avoidance of robot manipulator,
X. Wang, C. Yang, H. Ma, and L. Cheng, “Shared control for teleoperation enhanced by autonomous obstacle avoidance of robot manipulator,” in2015 IEEE/RSJ International Conference on Intelli- gent Robots and Systems (IROS). IEEE, 2015, pp. 4575–4580
2015
-
[27]
Shared control of robot manipulators with obstacle avoidance: A deep reinforcement learning approach,
M. Rubagotti, B. Sangiovanni, A. Nurbayeva, G. P. Incremona, A. Fer- rara, and A. Shintemirov, “Shared control of robot manipulators with obstacle avoidance: A deep reinforcement learning approach,”IEEE Control Systems Magazine, vol. 43, no. 1, pp. 44–63, 2023
2023
-
[28]
Shared control in robot teleoperation with improved potential fields,
A. Gottardi, S. Tortora, E. Tosello, and E. Menegatti, “Shared control in robot teleoperation with improved potential fields,”IEEE Transac- tions on Human-Machine Systems, vol. 52, no. 3, pp. 410–422, 2022
2022
-
[29]
A teleoperation framework for mobile robots based on shared control,
J. Luo, Z. Lin, Y . Li, and C. Yang, “A teleoperation framework for mobile robots based on shared control,”IEEE robotics and automation letters, vol. 5, no. 2, pp. 377–384, 2019
2019
-
[30]
Deep reinforcement learning for shared control of mobile robots,
C. Tian, S. Shaik, and Y . Wang, “Deep reinforcement learning for shared control of mobile robots,”IET Cyber-Systems and Robotics, vol. 3, no. 4, pp. 315–330, 2021
2021
-
[31]
Skill-based shared control,
C. E. Mower, J. Moura, and S. Vijayakumar, “Skill-based shared control,” inRobotics: Science and Systems 2021. The Robotics: Science and Systems Foundation, 2021
2021
-
[32]
A generative model for intention recognition and manipulation assistance in teleoperation,
A. K. Tanwani and S. Calinon, “A generative model for intention recognition and manipulation assistance in teleoperation,” in2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2017, pp. 43–50
2017
-
[33]
A robotic shared control teleoperation method based on learning from demonstrations,
B. Xi, S. Wang, X. Ye, Y . Cai, T. Lu, and R. Wang, “A robotic shared control teleoperation method based on learning from demonstrations,” International Journal of Advanced Robotic Systems, vol. 16, no. 4, p. 1729881419857428, 2019
2019
-
[34]
Artificial locomotion control: from human to robots,
C. Azevedo, P. Poignet, and B. Espiau, “Artificial locomotion control: from human to robots,”Robotics and Autonomous Systems, vol. 47, no. 4, pp. 203–223, 2004
2004
-
[35]
Anthropomorphic reaching movement generating method for human-like upper limb robot,
C. He, X.-W. Xu, X.-F. Zheng, C.-H. Xiong, Q.-L. Li, W.-B. Chen, and B.-Y . Sun, “Anthropomorphic reaching movement generating method for human-like upper limb robot,”IEEE Transactions on Cybernetics, vol. 52, no. 12, pp. 13 225–13 236, 2021
2021
-
[36]
Toward human-like grasp: Dexterous grasping via semantic representation of object-hand,
T. Zhu, R. Wu, X. Lin, and Y . Sun, “Toward human-like grasp: Dexterous grasping via semantic representation of object-hand,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021, pp. 15 741–15 751
2021
-
[37]
A human-like trajectory planning method on a curve based on the driver preview mechanism,
J. Zhao, D. Song, B. Zhu, Z. Sun, J. Han, and Y . Sun, “A human-like trajectory planning method on a curve based on the driver preview mechanism,”IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 11, pp. 11 682–11 698, 2023
2023
-
[38]
Humanlike inverse kinematics for improved spatial awareness in construction robot teleoperation: Design and experiment,
T. Zhou, Q. Zhu, Y . Ye, and J. Du, “Humanlike inverse kinematics for improved spatial awareness in construction robot teleoperation: Design and experiment,”Journal of Construction Engineering and Management, vol. 149, no. 7, p. 04023044, 2023
2023
-
[39]
Effect of the implementation of the two-third power law in teleoperation,
Y . Rybarczyk and D. Carvalho, “Effect of the implementation of the two-third power law in teleoperation,” inAdvances in Human Factors and System Interactions: Proceedings of the AHFE 2016 International Conference on Human Factors and System Interactions, July 27-31, 2016, Walt Disney World®, Florida, USA. Springer, 2016, pp. 283– 292
2016
-
[40]
Human motion generation: A survey,
W. Zhu, X. Ma, D. Ro, H. Ci, J. Zhang, J. Shi, F. Gao, Q. Tian, and Y . Wang, “Human motion generation: A survey,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 46, no. 4, pp. 2430– 2449, 2023
2023
-
[41]
Using two-third power law for segmentation of hand movement in robotic assisted surgery,
S. B. Shafiei, K. A. Guru, and E. T. Esfahani, “Using two-third power law for segmentation of hand movement in robotic assisted surgery,” inInternational Design Engineering Technical Conferences and Computers and Information in Engineering Conference, vol. 57144. American Society of Mechanical Engineers, 2015, p. V05CT08A014
2015
-
[42]
Determining the important subjective criteria in the perception of human-like robot movements using virtual reality,
O. Hugues, V . Weistroffer, A. Paljic, P. Fuchs, A. A. Karim, T. Gaudin, and A. Buendia, “Determining the important subjective criteria in the perception of human-like robot movements using virtual reality,”In- ternational journal of humanoid robotics, vol. 13, no. 02, p. 1550033, 2016
2016
-
[43]
Velocity- curvature patterns limit human-robot physical interaction,
P. Maurice, M. E. Huber, N. Hogan, and D. Sternad, “Velocity- curvature patterns limit human-robot physical interaction,”IEEE robotics and automation letters, vol. 3, no. 1, p. 249, 2017
2017
-
[44]
Global metric properties and preparatory processes in drawing movements,
F. Lacquanti, C. Terzuolo, and P. Viviani, “Global metric properties and preparatory processes in drawing movements,” inPreparatory states and processes. Psychology Press, 2019, pp. 357–370
2019
-
[45]
Robot operating system (ros),
Open Robotics, “Robot operating system (ros),” https://www.ros.org/, 2026, accessed: 2026-03-03
2026
-
[46]
Biological kinematics: a detailed review of the velocity-curvature power law calculation,
D. S. Fraser, M. Di Luca, and J. L. Cook, “Biological kinematics: a detailed review of the velocity-curvature power law calculation,” Experimental Brain Research, vol. 243, no. 5, p. 107, 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.