Commerge: Communication-Efficient, Robust, and Fast LiDAR Map Merging Framework for Multi-Robot Coordination in Resource-Constrained Scenarios
Pith reviewed 2026-06-25 21:15 UTC · model grok-4.3
The pith
Commerge reduces multi-robot LiDAR map merging communication by up to 5000x by exchanging only a carefully selected small subset of scans.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Commerge reduces inter-robot communication by up to 5,000x while maintaining alignment accuracy by exchanging only a small subset of carefully selected scans formulated as a three-stage cascaded optimization on an exchange graph.
What carries the argument
The exchange graph with vertices as robot keyframes and edges as candidate inter-robot loops, processed by three cascade stages that enforce sequential overlap, balanced transmission cost, and geometric-perceptual optimality.
If this is right
- Map merging becomes practical in low-bandwidth environments such as caves and planetary analogs by dropping data volume from gigabytes to megabytes.
- Alignment accuracy stays comparable to full-data methods across indoor, outdoor, and embedded-to-desktop platforms.
- Multi-robot exploration and area coverage can proceed without high-bandwidth links as the communication bottleneck is removed.
- The same selection logic applies to the five public and four in-house datasets tested, covering diverse terrain types.
Where Pith is reading between the lines
- The graph-based selection might extend to camera or radar data if analogous overlap and perceptual criteria can be defined for those modalities.
- Larger robot teams would see proportionally larger savings because the per-robot exchange stays bounded by the selected subset size.
- In rapidly changing scenes the optimization might need periodic re-execution to keep the selected subset current.
Load-bearing premise
A small, sequentially overlapped, balanced, and geometrically-perceptually optimal subset of scans is sufficient to preserve full alignment quality without degradation.
What would settle it
Direct measurement of alignment error on the HeLiPR dataset when merging with the full scan set versus only the selected subset; if error rises beyond the reported comparable level the claim fails.
Figures





















read the original abstract
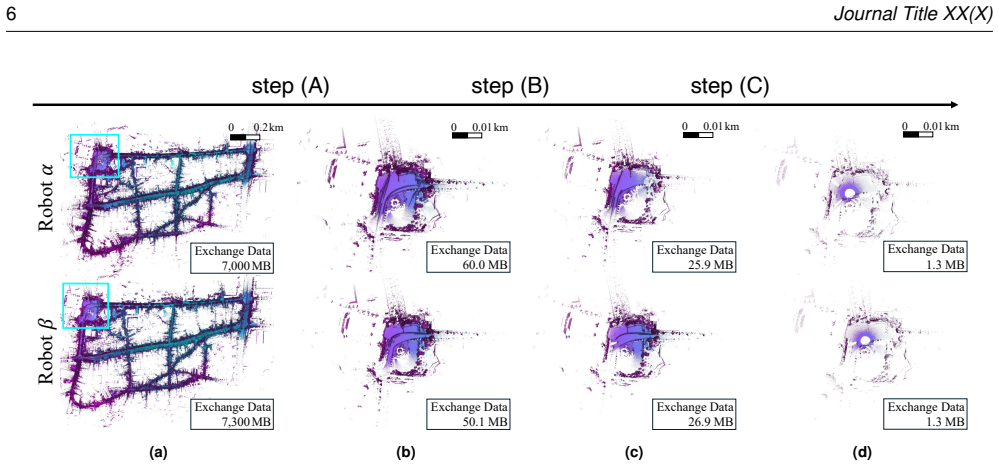
By maintaining global consistency across robot teams, multi-robot LiDAR map merging enables faster exploration and efficient area coverage. However, map merging requires exchanging massive sensor data between the server and robots, making communication the bottleneck, especially in communication-constrained environments. Therefore, we present Commerge, a communication-efficient map merging framework that achieves bandwidth reduction through graph-theoretic selective data exchange. By doing so, our Commerge reduces inter-robot communication by up to 5,000x while maintaining alignment accuracy. Our key insight is that only a small subset of carefully selected scans is sufficient for robust map merging. We formulate this as a three-stage cascaded optimization problem on an exchange graph, where vertices represent robot keyframes and edges denote candidate inter-robot loops. Through three cascade stages, we select a sequentially overlapped, balanced-transmission-cost, and geometrically-perceptually optimal scan subset that preserves alignment quality while reducing communication. Unlike existing approaches that either transmit whole scans, which require GB-scale data exchange, or employ naive downsampling, our approach exchanges only MB-scale data while achieving comparable alignment accuracy. Extensive evaluation on five public datasets and four in-house datasets covering cave, planetary-analog, indoor, and outdoor campus environments shows up to 99.98% reduction in data exchange (e.g., from 7,000MB to 1.3MB on the HeLiPR dataset), while maintaining alignment performance across embedded to desktop platforms. The supplementary materials are available at https://sparolab.github.io/research/commerge.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents Commerge, a framework for multi-robot LiDAR map merging that reduces communication by selecting a minimal subset of scans via three-stage cascaded optimization (sequential overlap, balanced cost, geometric-perceptual optimality) on an exchange graph. It claims up to 5,000x (99.98%) bandwidth reduction (e.g., 7 GB to 1.3 MB on HeLiPR) while maintaining alignment accuracy, validated on five public and four in-house datasets across cave, planetary, indoor, and outdoor settings.
Significance. If the accuracy-preservation claim holds, the result is significant for resource-constrained multi-robot coordination, enabling GB-to-MB data exchange without full-scan transmission or naive downsampling, directly addressing bandwidth bottlenecks in exploration and coverage tasks.
major comments (1)
- [Evaluation (datasets and quantitative results)] The load-bearing claim that the three-stage cascaded optimization on the exchange graph yields a subset preserving full alignment quality (no degradation relative to the complete scan set) is only partially supported by the reported 'comparable alignment accuracy.' The evaluation must explicitly demonstrate that the sequentially overlapped + balanced + geometrically-perceptually optimal subset captures all necessary loop closures and geometric constraints; otherwise the downstream pose-graph optimizer could silently lose critical edges. This requires ablation or statistical equivalence tests (e.g., ATE or map-overlap metrics with confidence intervals) comparing subset vs. full-set results on each dataset.
minor comments (2)
- [Method (three-stage optimization)] Clarify the exact definitions and weighting of the three optimality criteria in the cascaded stages; the abstract describes them at a high level but the formulation details (objective functions, thresholds) are needed for reproducibility.
- [Abstract and results] The 5,000x reduction figure and the specific 7,000 MB to 1.3 MB example should be tied to a table or figure showing per-dataset communication volumes and the corresponding alignment metrics side-by-side with baselines.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the major comment below and will strengthen the evaluation with additional analyses in the revised version.
read point-by-point responses
-
Referee: The load-bearing claim that the three-stage cascaded optimization on the exchange graph yields a subset preserving full alignment quality (no degradation relative to the complete scan set) is only partially supported by the reported 'comparable alignment accuracy.' The evaluation must explicitly demonstrate that the sequentially overlapped + balanced + geometrically-perceptually optimal subset captures all necessary loop closures and geometric constraints; otherwise the downstream pose-graph optimizer could silently lose critical edges. This requires ablation or statistical equivalence tests (e.g., ATE or map-overlap metrics with confidence intervals) comparing subset vs. full-set results on each dataset.
Authors: We agree that explicit verification of constraint preservation is required to substantiate the no-degradation claim. While the manuscript reports comparable accuracy on nine datasets, we acknowledge that direct ablations and statistical tests would more rigorously confirm retention of all critical loop closures. In revision we will add: (1) stage-wise ablation quantifying preserved inter-robot edges, and (2) ATE and map-overlap metrics with 95% confidence intervals comparing subset versus full-set results on every dataset. These additions will directly address potential silent loss of geometric constraints. revision: yes
Circularity Check
No circularity: independent formulation of cascaded graph optimization
full rationale
The paper formulates the subset selection directly as a three-stage cascaded optimization on an exchange graph whose vertices and edges are defined from the input keyframes and candidate loops. No equations reduce a fitted parameter to a renamed prediction, no self-citation supplies a load-bearing uniqueness theorem, and no ansatz is smuggled in. The central claim (MB-scale exchange preserves alignment) is presented as an empirical outcome of the stated optimality criteria rather than a definitional identity. This is the normal self-contained case.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption A small subset of scans selected via cascaded graph optimization is sufficient for robust map merging without loss of alignment quality
Reference graph
Works this paper leans on
-
[1]
In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp
Ao S, Hu Q, Wang H, Xu K and Guo Y (2023) BUFFER: Balancing accuracy, efficiency, and generalizability in point cloud registration. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 1255--1264
2023
-
[2]
In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp
Arandjelovic R, Gronat P, Torii A, Pajdla T and Sivic J (2016) NetVLAD: CNN architecture for weakly supervised place recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp. 5297--5307
2016
-
[3]
Science Robotics 8(80): eade9548
Arm P, Waibel G, Preisig J, Tuna T, Zhou R, Bickel V, Ligeza G, Miki T, Kehl F, Kolvenbach H and others (2023) Scientific exploration of challenging planetary analog environments with a team of legged robots. Science Robotics 8(80): eade9548
2023
-
[4]
IEEE Robotics and Automation Letters 6(2): 855--862
Bernreiter L, Ott L, Nieto J, Siegwart R and Cadena C (2021) PHASER: A robust and correspondence‑free global pointcloud registration. IEEE Robotics and Automation Letters 6(2): 855--862
2021
-
[5]
In: Sensor Fusion IV: Control Paradigms and Data Structures, volume 1611, pp
Besl PJ and McKay ND (1992) Method for registration of 3-D shapes. In: Sensor Fusion IV: Control Paradigms and Data Structures, volume 1611, pp. 586--606
1992
-
[6]
The International Journal of Robotics Research 43(4): 485--512
Best G, Garg R, Keller J, Hollinger GA and Scherer S (2024) Multi-robot, multi-sensor exploration of multifarious environments with full mission aerial autonomy. The International Journal of Robotics Research 43(4): 485--512
2024
-
[7]
IEEE Transactions on Robotics 21(3): 376--386
Burgard W, Moors M, Stachniss C and Schneider FE (2005) Coordinated multi-robot exploration. IEEE Transactions on Robotics 21(3): 376--386
2005
-
[8]
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pp
Cao Y, Wang Y and Chen H (2025) Real-time LiDAR point cloud compression and transmission for resource-constrained robots. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pp. 12789--12795
2025
-
[9]
IEEE Robotics and Automation Letters 7(4): 9175--9182
Chang Y, Ebadi K, Denniston CE, Ginting MF, Rosinol A, Reinke A, Palieri M, Shi J, Chatterjee A, Morrell B and others (2022) LAMP 2.0: A robust multi-robot SLAM system for operation in challenging large-scale underground environments. IEEE Robotics and Automation Letters 7(4): 9175--9182
2022
-
[10]
IEEE Transactions on Instrumentation and Measurement
Chang G, Shen H, Hui Y, Zhang X, Lu J, Lu H and Tian B (2025) LiDAR-based decentralized collaborative localization and mapping for multi-UAV with stable triangle descriptor. IEEE Transactions on Instrumentation and Measurement
2025
-
[11]
IEEE Robotics and Automation Letters 2(2): 640--647
Cieslewski T and Scaramuzza D (2017) Efficient decentralized visual place recognition using a distributed inverted index. IEEE Robotics and Automation Letters 2(2): 640--647
2017
-
[12]
In: Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), pp
Cieslewski T, Choudhary S and Scaramuzza D (2018) Data-efficient decentralized visual SLAM. In: Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), pp. 2466--2473
2018
-
[13]
SICE Journal of Control, Measurement, and System Integration 10(6): 495--503
Cortés J and Egerstedt M (2017) Coordinated control of multi-robot systems: A survey. SICE Journal of Control, Measurement, and System Integration 10(6): 495--503
2017
-
[14]
John Wiley & Sons
Cover TM (1999) Elements of Information Theory. John Wiley & Sons
1999
-
[15]
Journal of Intelligent & Robotic Systems 110(1): 22
Damigos G, Stathoulopoulos N, Koval A, Lindgren T, Nikolakopoulos G (2024) Communication-Aware Control of Large Data Transmissions via Centralized Cognition and 5G Networks for Multi-Robot Map Merging. Journal of Intelligent & Robotic Systems 110(1): 22
2024
-
[16]
IEEE Transactions on Image Processing 25(8): 3947--3956
De Queiroz RL and Chou PA (2016) Compression of 3D point clouds using a region-adaptive hierarchical transform. IEEE Transactions on Image Processing 25(8): 3947--3956
2016
-
[17]
Technical Report GT-RIM-CP&R-2012-002, Georgia Institute of Technology
Dellaert F (2012) Factor graphs and GTSAM: A hands-on introduction. Technical Report GT-RIM-CP&R-2012-002, Georgia Institute of Technology
2012
-
[18]
Communications of the ACM 24(6): 381--395
Fischler MA and Bolles RC (1981) Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Communications of the ACM 24(6): 381--395
1981
-
[19]
In: Proceedings of the 19th IEEE International Conference on Factory Communication Systems (WFCS), pp
Formis G, Scanzio S, Cena G, Valenzano A (2023) Predicting wireless channel quality by means of moving averages and regression models. In: Proceedings of the 19th IEEE International Conference on Factory Communication Systems (WFCS), pp. 1--8
2023
-
[20]
In: Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), pp
Giamou M, Khosoussi K and How JP (2018) Talk resource-efficiently to me: Optimal communication planning for distributed loop closure detection. In: Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), pp. 3841--3848
2018
-
[21]
Current Robotics Reports 3(4): 213--225
Gielis J, Shankar A, Prorok A (2022) A Critical Review of Communications in Multi-Robot Systems. Current Robotics Reports 3(4): 213--225
2022
-
[22]
arXiv preprint arXiv:2502.13452
Gil H, Lee D, Kim G and Kim A (2025) Ephemerality meets LiDAR-based lifelong mapping. arXiv preprint arXiv:2502.13452
arXiv 2025
-
[23]
APSIPA Transactions on Signal and Information Processing 9: e13
Graziosi D, Nakagami O, Kuma S, Zaghetto A, Suzuki T and Tabatabai A (2020) An overview of ongoing point cloud compression standardization activities: Video-based (V-PCC) and geometry-based (G-PCC). APSIPA Transactions on Signal and Information Processing 9: e13
2020
-
[24]
Available at: https://github.com/MichaelGrupp/evo
Grupp M (2017) evo: Python package for the evaluation of odometry and SLAM. Available at: https://github.com/MichaelGrupp/evo
2017
-
[25]
arXiv preprint arXiv:2102.03804
He D, Xu W, Zhang F (2021) Kalman filters on differentiable manifolds. arXiv preprint arXiv:2102.03804
arXiv 2021
-
[26]
Journal of Field Robotics
He K, Jia R, Hong H, Wang N and Hu Y (2025) LDG-CSLAM: Multi-robot collaborative SLAM based on curve analysis, normal distribution, and factor graph optimization. Journal of Field Robotics
2025
-
[27]
In: Proceedings of Linux Conf Au, vol
Hemminger S (2005) Network emulation with NetEm. In: Proceedings of Linux Conf Au, vol. 5
2005
-
[28]
In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp
Huang S, Gojcic Z, Usvyatsov M, Wieser A and Schindler K (2021) Predator: Registration of 3D point clouds with low overlap. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 4267--4276
2021
-
[29]
IEEE Robotics and Automation Letters 7(2): 1150--1157
Huang Y, Shan T, Chen F and Englot B (2021) Disco-SLAM: Distributed scan context-enabled multi-robot LiDAR SLAM with two-stage global-local graph optimization. IEEE Robotics and Automation Letters 7(2): 1150--1157
2021
-
[30]
arXiv preprint arXiv:2507.17130
Jeong S, Kim H and Cho Y (2025) MARSCalib: Multi-robot, Automatic, Robust, Spherical Target-based Extrinsic Calibration in Field and Extraterrestrial Environments. arXiv preprint arXiv:2507.17130
arXiv 2025
-
[31]
The International Journal of Robotics Research 43(12): 1867--1883
Jung M, Yang W, Lee D, Gil H, Kim G and Kim A (2024) HeLiPR: Heterogeneous LiDAR dataset for inter-LiDAR place recognition under spatiotemporal variations. The International Journal of Robotics Research 43(12): 1867--1883
2024
-
[32]
IEEE Transactions on Intelligent Vehicles
Kang G, Kim H, Choi B, Jeong S, Shin Y-S and Cho Y (2025) Uni-Mapper: Unified Mapping Framework for Multi-modal LiDARs in Complex and Dynamic Environments. IEEE Transactions on Intelligent Vehicles
2025
-
[33]
Journal of the Operational Research Society 49(3): 237--252
Kelly FP, Maulloo AK, Tan DKH (1998) Rate Control for Communication Networks: Shadow Prices, Proportional Fairness and Stability. Journal of the Operational Research Society 49(3): 237--252
1998
-
[34]
In: Cooperative Robots and Sensor Networks 2015, pp
Khamis A, Hussein A and Elmogy A (2015) Multi-robot task allocation: A review of the state-of-the-art. In: Cooperative Robots and Sensor Networks 2015, pp. 31--51
2015
-
[35]
In: Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp
Kim G and Kim A (2018) Scan Context: Egocentric spatial descriptor for place recognition within 3D point cloud map. In: Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 4802--4809
2018
-
[36]
In: Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), pp
Kim G, Park YS, Cho Y, Jeong J and Kim A (2020) Mulran: Multimodal range dataset for urban place recognition. In: Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), pp. 6246--6253
2020
-
[37]
In: Proceedings of the 2022 IEEE International Conference on Robotics and Automation (ICRA), pp
Kim G and Kim A (2022) LT-Mapper: A modular framework for LiDAR-based lifelong mapping. In: Proceedings of the 2022 IEEE International Conference on Robotics and Automation (ICRA), pp. 7995--8002
2022
-
[38]
In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pp
Kim J, Kim H, Jeong S, Shin Y, Cho Y (2025) DiTer++: Diverse terrain and multi-modal dataset for multi-robot SLAM in multi-session environments. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pp. 12187--12193
2025
-
[39]
IEEE Robotics and Automation Letters
Kim H, Choi J, Sim T, Kim G and Cho Y (2024) Narrowing your FOV with SOLiD: Spatially organized and lightweight global descriptor for FOV-constrained LiDAR place recognition. IEEE Robotics and Automation Letters
2024
-
[40]
arXiv preprint arXiv:2505.08230
Kim H, Choi J, Kim J, Yang G, Cho D, Lim H and Cho Y (2025) SKiD-SLAM: Robust, Lightweight, and Distributed Multi-Robot LiDAR SLAM in Resource-Constrained Field Environments. arXiv preprint arXiv:2505.08230
arXiv 2025
-
[41]
In: Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), pp
Knights J, Vidanapathirana K, Ramezani M, Sridharan S, Fookes C and Moghadam P (2023) WILD-Places: A large-scale dataset for LiDAR place recognition in unstructured natural environments. In: Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), pp. 11322--11328
2023
-
[42]
In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003), Vol
Ko J, Stewart B, Fox D, Konolige K and Limketkai B (2003) A practical, decision-theoretic approach to multi-robot mapping and exploration. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003), Vol. 4, pp. 3232--3238
2003
-
[43]
In: 2021 IEEE International Conference on Robotics and Automation (ICRA), pp
Koide K, Yokozuka M, Oishi S and Banno A (2021) Voxelized GICP for fast and accurate 3D point cloud registration. In: 2021 IEEE International Conference on Robotics and Automation (ICRA), pp. 11054--11059
2021
-
[44]
Journal of Open Source Software 9(100): 6948
Koide K (2024) small\_gicp: Efficient and parallel algorithms for point cloud registration. Journal of Open Source Software 9(100): 6948. doi:10.21105/joss.06948 https://doi.org/10.21105/joss.06948
-
[45]
IEEE Transactions on Vehicular Technology 69(1): 443--456
Kulkarni A, Seetharam A, Ramesh A, Herath JD (2019) DeepChannel: Wireless Channel Quality Prediction Using Deep Learning. IEEE Transactions on Vehicular Technology 69(1): 443--456
2019
-
[46]
Field Robotics 2: 971--1000
Lajoie P - Y, Ramtoula B, Wu F, Beltrame G (2022) Towards Collaborative Simultaneous Localization and Mapping: A Survey of the Current Research Landscape. Field Robotics 2: 971--1000
2022
-
[47]
IEEE Robotics and Automation Letters 9(1): 475--482
Lajoie P-Y and Beltrame G (2023) Swarm-SLAM: Sparse decentralized collaborative simultaneous localization and mapping framework for multi-robot systems. IEEE Robotics and Automation Letters 9(1): 475--482
2023
-
[48]
IEEE Robotics and Automation Letters
Lajoie P-Y, Ramtoula B, De Martini D and Beltrame G (2025) 3D foundation model-based loop closing for decentralized collaborative SLAM. IEEE Robotics and Automation Letters
2025
-
[49]
IEEE Transactions on Field Robotics
Lajoie P-Y, Soma K, Bong HM, Lemieux-Bourque A, Zhang R, Varadharajan VS and Beltrame G (2025) Multi-robot decentralized collaborative SLAM in planetary analogue environments: Dataset, challenges, and lessons learned. IEEE Transactions on Field Robotics
2025
-
[50]
arXiv preprint arXiv:2409.15615
Lim H, Kim D, Shin G, Shi J, Vizzo I, Myung H, Park J and Carlone L (2024) KISS-Matcher: Fast and robust point cloud registration revisited. arXiv preprint arXiv:2409.15615
arXiv 2024
-
[51]
arXiv preprint arXiv:2511.00635
Lim H, Kim D, Myung H (2025) Multi-Mapcher: Loop Closure Detection-Free Heterogeneous LiDAR Multi-Session SLAM Leveraging Outlier-Robust Registration for Autonomous Vehicles. arXiv preprint arXiv:2511.00635
arXiv 2025
-
[52]
IEEE Robotics and Automation Letters 9(3): 2798--2805
Liu Y, Fu Y, Qin M, Xu Y, Xu B, Chen F, Goossens B, Sun PZ, Yu H, Liu C and others (2024) BotanicGarden: A high-quality dataset for robot navigation in unstructured natural environments. IEEE Robotics and Automation Letters 9(3): 2798--2805
2024
-
[53]
IEEE Robotics and Automation Letters
Liu J, Xu X, Lu S, Wang S, Wang C, Xiong R and Wang Y (2025) Sparse hierarchical LiDAR bundle adjustment for online collaborative localization and mapping. IEEE Robotics and Automation Letters
2025
-
[54]
IEEE Transactions on Robotics
Luo L, Cao S-Y, Li X, Xu J, Ai R, Yu Z and Chen X (2025) BEVPlace++: Fast, robust, and lightweight LiDAR global localization for unmanned ground vehicles. IEEE Transactions on Robotics
2025
-
[55]
IEEE Robotics and Automation Letters 7(3): 6958--6965
Ma J, Zhang J, Xu J, Ai R, Gu W and Chen X (2022) OverlapTransformer: An efficient and yaw-angle-invariant transformer network for LiDAR-based place recognition. IEEE Robotics and Automation Letters 7(3): 6958--6965
2022
-
[56]
IEEE Transactions on Industrial Informatics 20(3): 4039--4048
Ma J, Xiong G, Xu J and Chen X (2023) CVTNet: A cross-view transformer network for LiDAR-based place recognition in autonomous driving environments. IEEE Transactions on Industrial Informatics 20(3): 4039--4048
2023
-
[57]
Expert Systems with Applications 173: 114660
Madridano A, Al-Kaff A, Martín D and De La Escalera A (2021) Trajectory planning for multi-robot systems: Methods and applications. Expert Systems with Applications 173: 114660
2021
-
[58]
In: Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), pp
Mangelson JG, Dominic D, Eustice RM and Vasudevan R (2018) Pairwise consistent measurement set maximization for robust multi-robot map merging. In: Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), pp. 2916--2923
2018
-
[59]
In: Proceedings of the 2012 IEEE International Conference on Robotics and Automation (ICRA), pp
Milford MJ and Wyeth GF (2012) SeqSLAM: Visual route-based navigation for sunny summer days and stormy winter nights. In: Proceedings of the 2012 IEEE International Conference on Robotics and Automation (ICRA), pp. 1643--1649
2012
-
[60]
In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp
Nguyen T-M, Yuan S, Nguyen TH, Yin P, Cao H, Xie L, Wozniak M, Jensfelt P, Thiel M, Ziegenbein J and others (2024) MCD: Diverse large-scale multi-campus dataset for robot perception. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 22304--22313
2024
-
[61]
Robotics and Autonomous Systems 112: 13--21
Oishi S, Inoue Y, Miura J and Tanaka S (2019) SeqSLAM++: View-based robot localization and navigation. Robotics and Autonomous Systems 112: 13--21
2019
-
[62]
Sensors 23(7): 3625
Orr J and Dutta A (2023) Multi-agent deep reinforcement learning for multi-robot applications: A survey. Sensors 23(7): 3625
2023
-
[63]
Autonomous Robots 34(3): 133--148
Pomerleau F, Colas F, Siegwart R and Magnenat S (2013) Comparing ICP variants on real-world data sets: Open-source library and experimental protocol. Autonomous Robots 34(3): 133--148
2013
-
[64]
Autonomous Robots 11(2): 117--136
Roy N and Dudek G (2001) Collaborative robot exploration and rendezvous: Algorithms, performance bounds and observations. Autonomous Robots 11(2): 117--136
2001
-
[65]
In: Proceedings of the IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct), pp
Schmuck P, Ziegler T, Karrer M, Perraudin J and Chli M (2021) COVINS: Visual-inertial SLAM for centralized collaboration. In: Proceedings of the IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct), pp. 171--176
2021
-
[66]
Algorithms and Combinatorics, vol
Schrijver A (2003) Combinatorial Optimization: Polyhedra and Efficiency. Algorithms and Combinatorics, vol. 24
2003
-
[67]
In: Robotics: Science and Systems (RSS)
Segal A, Haehnel D and Thrun S (2009) Generalized-ICP. In: Robotics: Science and Systems (RSS). Seattle, WA, USA, pp. 435
2009
-
[68]
In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), pp
Seo M, Lim H, Lee K, Carlone L and Park J (2025) BUFFER-X: Towards zero-shot point cloud registration in diverse scenes. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), pp. 3851--3862
2025
-
[69]
The Bell System Technical Journal 27(3): 379--423
Shannon CE (1948) A Mathematical Theory of Communication. The Bell System Technical Journal 27(3): 379--423
1948
-
[70]
In: Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), pp
Shi J, Yang H and Carlone L (2021) ROBIN: A graph-theoretic approach to reject outliers in robust estimation using invariants. In: Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), pp. 13820--13827
2021
-
[71]
In: Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), pp
Siam SM and Zhang H (2017) Fast-SeqSLAM: A fast appearance based place recognition algorithm. In: Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 5702--5708
2017
-
[72]
arXiv preprint arXiv:2301.09213
Stathoulopoulos N, Koval A, Agha-mohammadi A-A and Nikolakopoulos G (2023) Frame: Fast and robust autonomous 3D point cloud map-merging for egocentric multi-robot exploration. arXiv preprint arXiv:2301.09213
arXiv 2023
-
[73]
IEEE Transactions on Field Robotics
Stathoulopoulos N, Lindqvist B, Koval A, Agha-Mohammadi AA and Nikolakopoulos G (2024) FRAME: A modular framework for autonomous map-merging: Advancements in the field. IEEE Transactions on Field Robotics
2024
-
[74]
Expert Systems with Applications 237: 121508
Stathoulopoulos N, Koval A and Nikolakopoulos G (2024) 3DEG: Data-driven descriptor extraction for global re-localization in subterranean environments. Expert Systems with Applications 237: 121508
2024
-
[75]
IEEE Robotics and Automation Letters 11(1): 738--745
Stathoulopoulos N, Kanellakis C and Nikolakopoulos G (2025) A minimal subset approach for informed keyframe sampling in large-scale SLAM. IEEE Robotics and Automation Letters 11(1): 738--745
2025
-
[76]
arXiv preprint arXiv:2304.04362
Tian Y, Chang Y, Quang L, Schang A, Nieto-Granda C, How JP, Carlone L (2023) Resilient and Distributed Multi-Robot Visual SLAM: Datasets, Experiments, and Lessons Learned. arXiv preprint arXiv:2304.04362
arXiv 2023
-
[77]
arXiv preprint arXiv:1806.00188
Tian Y, Khosoussi K, Giamou M, How JP and Kelly J (2018) Near-optimal budgeted data exchange for distributed loop closure detection. arXiv preprint arXiv:1806.00188
Pith/arXiv arXiv 2018
-
[78]
The International Journal of Robotics Research 40(10--11): 1212--1233
Tian Y, Khosoussi K and How JP (2021) A resource-aware approach to collaborative loop-closure detection with provable performance guarantees. The International Journal of Robotics Research 40(10--11): 1212--1233
2021
-
[79]
IEEE Transactions on Pattern Analysis and Machine Intelligence 13(4): 376--380
Umeyama S (1991) Least-squares estimation of transformation parameters between two point patterns. IEEE Transactions on Pattern Analysis and Machine Intelligence 13(4): 376--380
1991
-
[80]
In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp
Uy MA and Lee GH (2018) PointNetVLAD: Deep point cloud based retrieval for large-scale place recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp. 4470--4479
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.