Robust Multi-step Model Predictive Control with Feasibility Guarantees
Pith reviewed 2026-06-25 20:25 UTC · model grok-4.3
The pith
Robust nonlinear MPC with multi-step predictors gains recursive feasibility via a priori checks and reachable-set fallbacks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By performing an a priori check for infeasibility of the robust nonlinear MPC optimisation problem and using information from previous solutions to provide fall-backs based on previously verified reachable sets, recursive feasibility and stability are ensured even when multi-step predictions generated at different times are inconsistent.
What carries the argument
The predictor-substitution strategy that supplies fall-backs drawn from previously verified reachable sets when the current multi-step predictions indicate potential infeasibility.
If this is right
- Recursive feasibility of the multi-step robust MPC problem is restored.
- Closed-loop stability follows from the restored feasibility.
- The a priori check can be performed without solving the full robust optimisation at every step.
- The method applies directly to formulations that use distinct multi-step models for different prediction instants.
- The predictor-substitution approach is demonstrated on a simple numerical example.
Where Pith is reading between the lines
- The same substitution idea could be applied to other prediction horizons or to switched multi-step models without redesigning the core optimisation.
- Computational savings arise when the a priori check frequently triggers a cheap fallback instead of a full robust solve.
- The technique might combine with tube-based or set-membership methods that already compute reachable sets.
- Testing on systems with longer prediction horizons would show whether the maintained reachable sets remain tight enough for performance.
Load-bearing premise
Reachable sets computed from earlier solutions remain valid fall-backs even when the current multi-step predictions turn out to be inconsistent with one another.
What would settle it
A concrete nonlinear system and uncertainty set for which the a priori check reports that a feasible solution exists, yet the full robust optimisation at the next step is infeasible because the fallback reachable sets no longer contain the true state trajectory.
Figures
read the original abstract
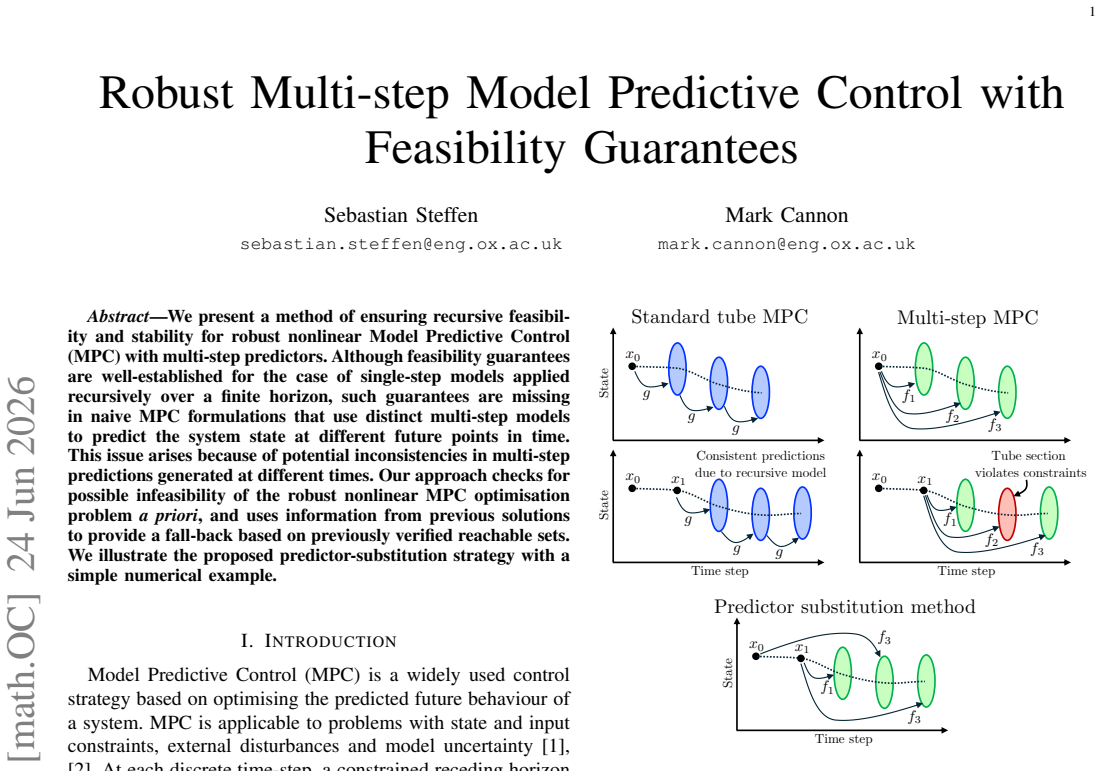
We present a method of ensuring recursive feasibility and stability for robust nonlinear Model Predictive Control (MPC) with multi-step predictors. Although feasibility guarantees are well-established for the case of single-step models applied recursively over a finite horizon, such guarantees are missing in naive MPC formulations that use distinct multi-step models to predict the system state at different future points in time. This issue arises because of potential inconsistencies in multi-step predictions generated at different times. Our approach checks for possible infeasibility of the robust nonlinear MPC optimisation problem \textit{a priori}, and uses information from previous solutions to provide a fall-back based on previously verified reachable sets. We illustrate the proposed predictor-substitution strategy with a simple numerical example.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a method for ensuring recursive feasibility and stability in robust nonlinear MPC formulations that employ distinct multi-step predictors. The approach performs an a priori check for potential infeasibility of the robust optimization problem and supplies a fall-back controller based on reachable sets verified from previous solutions, addressing inconsistencies that can arise when multi-step predictions are generated at different times. The method is illustrated via a simple numerical example.
Significance. If the a priori check and reachable-set fall-back can be rigorously shown to preserve recursive feasibility and stability without introducing hidden conservatism or requiring full re-optimization, the work would address a genuine gap in multi-step MPC theory, which is relevant for applications using learned or reduced-order predictors. The numerical example offers preliminary evidence of practicality, but the lack of any derivation, proof outline, or algorithmic pseudocode prevents evaluation of whether the guarantees are parameter-free or rely on external verification that remains valid under predictor substitution.
major comments (2)
- [Abstract] Abstract: the central claim that the a priori check can be performed without solving the full robust optimization problem, while still guaranteeing that previously verified reachable sets remain valid fall-backs, cannot be assessed because no equations, algorithm steps, or proof sketches are supplied in the available text.
- [Abstract] Abstract: the assertion that the method preserves stability for multi-step predictors rests on the unverified assumption that reachable sets computed from earlier solutions remain invariant under the predictor-substitution strategy; no test or counter-example analysis is provided to confirm this.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript concerning recursive feasibility and stability guarantees for robust nonlinear MPC with multi-step predictors. We address each major comment below and will revise the manuscript accordingly to improve clarity and completeness.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the a priori check can be performed without solving the full robust optimization problem, while still guaranteeing that previously verified reachable sets remain valid fall-backs, cannot be assessed because no equations, algorithm steps, or proof sketches are supplied in the available text.
Authors: We agree that the abstract does not include the supporting equations, algorithm steps, or proof sketches, which limits assessment from the abstract alone. The full manuscript contains the derivation of the a priori infeasibility check in Section 3, the fall-back reachable-set construction in Section 4, and Algorithm 1 outlining the predictor-substitution procedure. We will revise the manuscript by adding a concise proof outline to the introduction and ensuring the abstract references these sections, allowing readers to locate the details without needing to solve the full robust problem at runtime. revision: yes
-
Referee: [Abstract] Abstract: the assertion that the method preserves stability for multi-step predictors rests on the unverified assumption that reachable sets computed from earlier solutions remain invariant under the predictor-substitution strategy; no test or counter-example analysis is provided to confirm this.
Authors: The current numerical example illustrates practical behavior but does not explicitly analyze invariance of the reachable sets under predictor substitution or provide counter-example checks. We will add a dedicated analysis subsection examining the invariance property, including conditions under which it holds and expanded simulation results to confirm stability preservation. This will clarify whether the guarantees rely on external verification or are parameter-free within the stated assumptions. revision: yes
Circularity Check
No significant circularity
full rationale
The abstract describes an a priori infeasibility check and fall-back using previously verified reachable sets for multi-step MPC, with no equations, fitted parameters, or self-referential definitions presented. No load-bearing steps reduce by construction to inputs, self-citations, or ansatzes. The method is framed as relying on external verification of sets rather than internal redefinitions. With no concrete equations or proofs supplied that exhibit the enumerated circular patterns, the derivation chain is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Single-step robust nonlinear MPC already possesses established recursive feasibility and stability guarantees
Reference graph
Works this paper leans on
-
[1]
D. Q. Mayne, J. B. Rawlings, and M. M. Diehl,Model predictive control : theory, computation, and design. Nob Hill Pub., 2nd edition ed., 2024
2024
-
[2]
Kouvaritakis and M
B. Kouvaritakis and M. Cannon,Model predictive control. Springer, 2016
2016
-
[3]
An overview of nonlinear model predictive control applications,
S. J. Qin and T. A. Badgwell, “An overview of nonlinear model predictive control applications,”Nonlinear model predictive control, pp. 369–392, 2000
2000
-
[4]
A real-time iteration scheme for nonlinear optimization in optimal feedback control,
M. Diehl, H. G. Bock, and J. P. Schl ¨oder, “A real-time iteration scheme for nonlinear optimization in optimal feedback control,”SIAM Journal on control and optimization, vol. 43, no. 5, pp. 1714–1736, 2005
2005
-
[5]
Successive convexifi- cation of non-convex optimal control problems with state constraints,
Y . Mao, D. Dueri, M. Szmuk, and B. Ac ¸ıkmes ¸e, “Successive convexifi- cation of non-convex optimal control problems with state constraints,” Ifac-PapersOnline, vol. 50, no. 1, pp. 4063–4069, 2017
2017
-
[6]
A successive convexification approach for robust receding horizon control,
Y . Lishkova and M. Cannon, “A successive convexification approach for robust receding horizon control,”IEEE Transactions on Automatic Control, vol. 70, no. 10, pp. 6436–6448, 2025
2025
-
[7]
Deep learning model predictive control for deep brain stimulation in Parkinson’s disease,
S. Steffen and M. Cannon, “Deep learning model predictive control for deep brain stimulation in Parkinson’s disease,” in2025 IEEE 64th Conference on Decision and Control (CDC), pp. 5744–5749, IEEE, 2025
2025
-
[8]
Learning with imperfect models: When multi-step prediction mitigates compounding error,
A. Somalwar, B. D. Lee, G. J. Pappas, and N. Matni, “Learning with imperfect models: When multi-step prediction mitigates compounding error,” in2025 IEEE 64th Conference on Decision and Control (CDC), pp. 82–89, IEEE, 2025
2025
-
[9]
Statistical efficiency of single- and multi-step models for forecasting and control,
A. Somalwar, B. D. Lee, G. J. Pappas, and N. Matni, “Statistical efficiency of single- and multi-step models for forecasting and control,” 2026
2026
-
[10]
Robust multi-rate predictive control using multi-step prediction models learned from data,
E. Terzi, M. Farina, L. Fagiano, and R. Scattolini, “Robust multi-rate predictive control using multi-step prediction models learned from data,” Automatica, vol. 136, p. 109852, 2022
2022
-
[11]
Homo- thetic tube model predictive control with multi-step predictors,
D. Saccani, G. Ferrari-Trecate, M. N. Zeilinger, and J. K ¨ohler, “Homo- thetic tube model predictive control with multi-step predictors,”IEEE Control Systems Letters, vol. 7, pp. 3561–3566, 2023
2023
-
[12]
Stochastic data- driven predictive control: Chance-constraint satisfaction with identified multi-step predictors,
H. Balim, A. Carron, M. N. Zeilinger, and J. K ¨ohler, “Stochastic data- driven predictive control: Chance-constraint satisfaction with identified multi-step predictors,”IEEE Control Systems Letters, vol. 8, pp. 3249– 3254, 2024
2024
-
[13]
Probabilistic multi-step identification with implicit state estimation for stochastic MPC,
F. Fiedler and S. Lucia, “Probabilistic multi-step identification with implicit state estimation for stochastic MPC,”IEEE Access, vol. 11, pp. 117018–117029, 2023
2023
-
[14]
KPC: Learning-based model predictive control with deterministic guarantees,
E. T. Maddalena, P. Scharnhorst, Y . Jiang, and C. N. Jones, “KPC: Learning-based model predictive control with deterministic guarantees,” inProceedings of the 3rd Conference on Learning for Dynamics and Control, PMLR, vol. 144, pp. 1015–1026, 2021
2021
-
[15]
Input-to-state stability: a unifying framework for robust model predictive control,
D. Limon, T. Alamo, D. Raimondo, D. M. De La Pe ˜na, J. Bravo, A. Ferramosca, and E. Camacho, “Input-to-state stability: a unifying framework for robust model predictive control,”Nonlinear Model Pre- dictive Control: Towards New Challenging Applications, pp. 1–26, 2009
2009
-
[16]
CVXPY: A Python-embedded modeling lan- guage for convex optimization,
S. Diamond and S. Boyd, “CVXPY: A Python-embedded modeling lan- guage for convex optimization,”Journal of Machine Learning Research, vol. 17, no. 83, pp. 1–5, 2016
2016
-
[17]
Clarabel: An interior-point solver for conic programs with quadratic objectives,
P. J. Goulart and Y . Chen, “Clarabel: An interior-point solver for conic programs with quadratic objectives,” 2024
2024
-
[18]
Difference of convex functions in robust tube nonlinear MPC,
M. Doff-Sotta and M. Cannon, “Difference of convex functions in robust tube nonlinear MPC,”2022 IEEE 61st Conference on Decision and Control (CDC), pp. 3044–3050, 2022
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.