OSC2Runner: OpenSCENARIO 2.x Compliant High-Fidelity AV Simulation in CARLA
Pith reviewed 2026-06-26 05:36 UTC · model grok-4.3
The pith
OSC2Runner compiles OpenSCENARIO 2.x DSL into deterministic py_trees for native CARLA execution.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
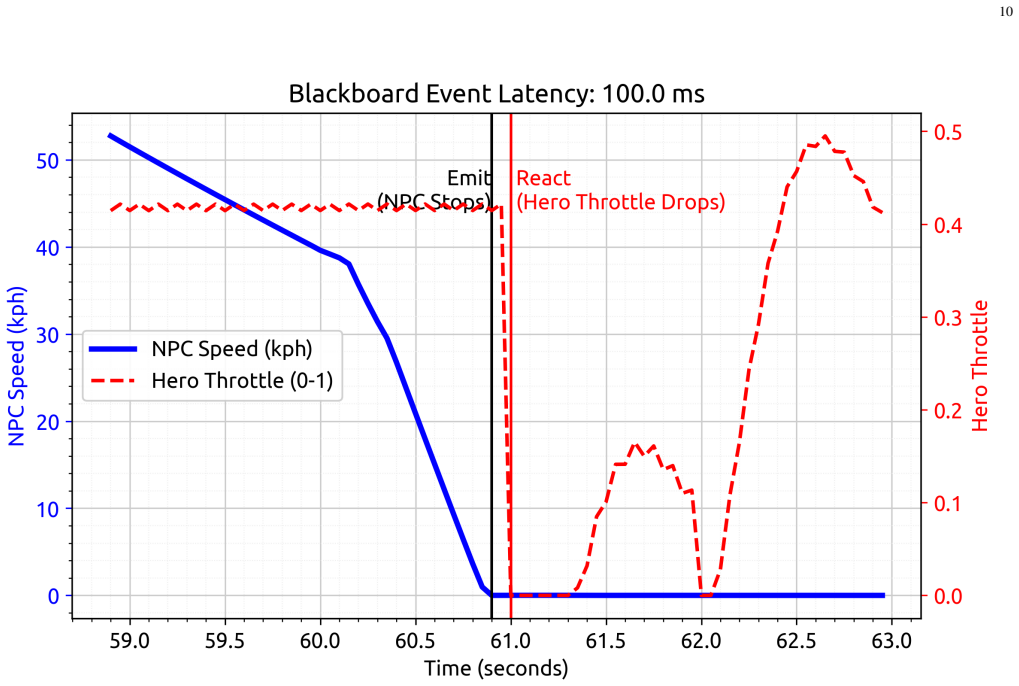
OSC2Runner formalizes scenario translation as a compilation pipeline through a multi-pass transpiler architecture. The architecture synthesizes type-safe Abstract Syntax Trees directly into dynamic deterministic behavior trees natively mapped to CARLA's atomic APIs. Empirical validation in highly concurrent adversarial case studies demonstrates tick-by-tick determinism, exact spatial trigger evaluation, and 100.0 ms cross-actor blackboard synchronization, while kinematic analysis confirms strict adherence to continuous environmental boundaries.
What carries the argument
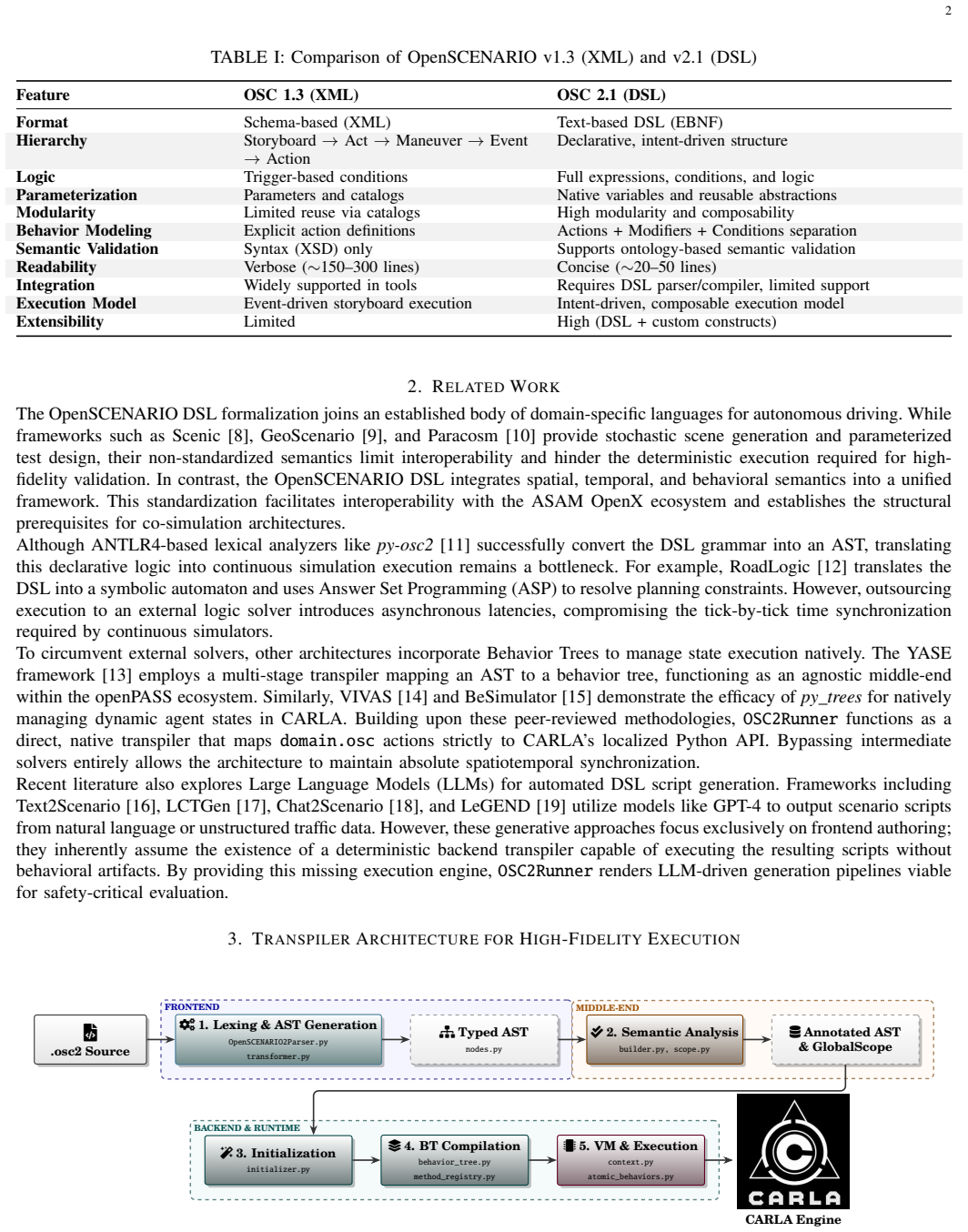
The multi-pass transpiler architecture that converts OpenSCENARIO v2.x DSL into type-safe ASTs and then into py_trees behavior trees mapped to CARLA atomic APIs.
If this is right
- Scenario-Based Testing moves from approximate behavioral interpretation to mathematically rigorous execution.
- The deterministic backend supports co-simulation and hardware-in-the-loop testing.
- Automated LLM-driven generation pipelines gain a reliable execution target.
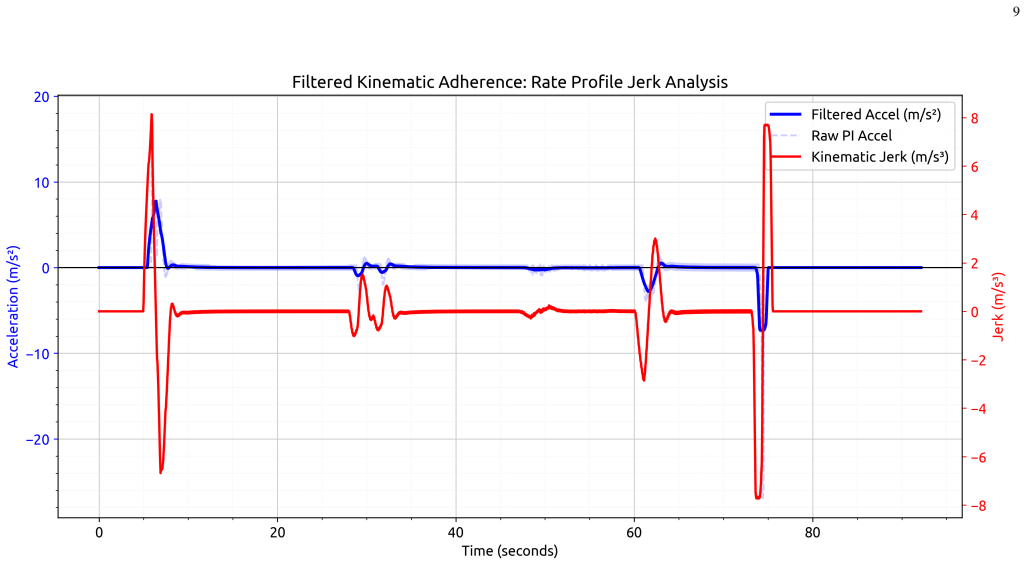
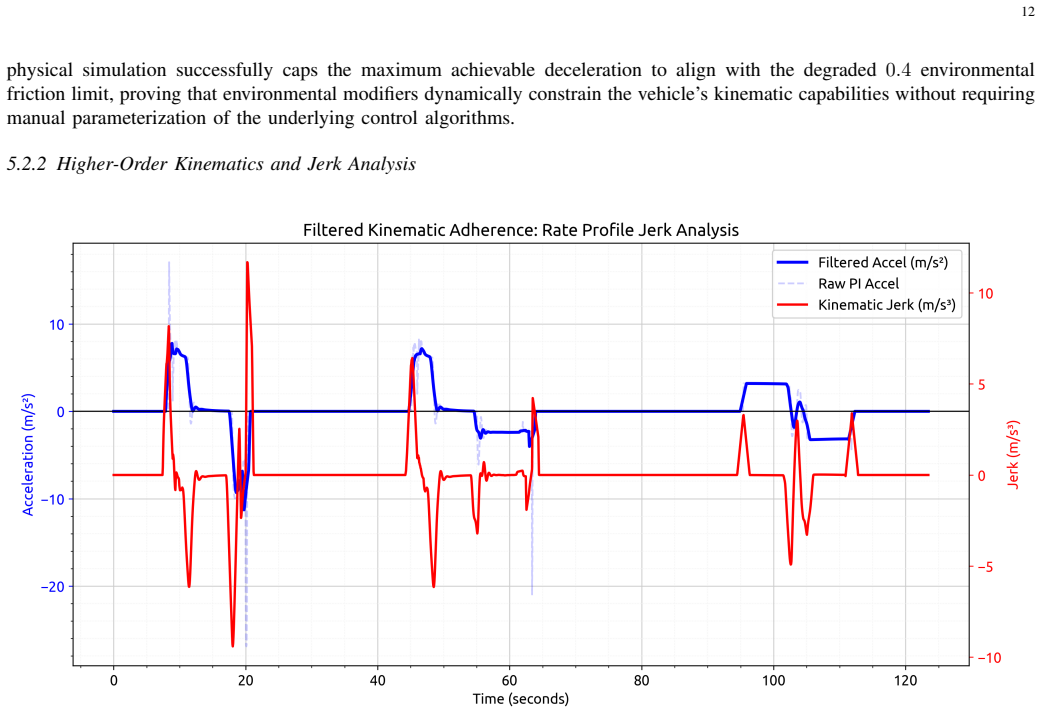
- Kinematic analysis shows strict adherence to continuous environmental boundaries in all tested cases.
Where Pith is reading between the lines
- The same transpiler pattern could be adapted to other simulators that expose atomic APIs, extending deterministic execution beyond CARLA.
- Tick-by-tick determinism may allow testing pipelines to replace statistical sampling with exhaustive replay of critical scenarios.
- The blackboard synchronization mechanism could serve as a template for multi-agent coordination in other real-time simulation domains.
Load-bearing premise
The multi-pass transpiler correctly synthesizes type-safe ASTs into py_trees that preserve exact OpenSCENARIO v2.x semantics when mapped to CARLA atomic APIs without introducing spatiotemporal drift or asynchronous latencies.
What would settle it
Execute a set of highly concurrent adversarial scenarios and verify whether every spatial trigger evaluates to the exact expected value on each simulation tick and whether any kinematic snapping or timing drift appears in the recorded trajectories.
Figures

read the original abstract
Scenario-Based Testing predominantly relies on the legacy ASAM OpenSCENARIO 1.x XML standard because existing continuous simulation frameworks lack native execution support for the recently matured v2.x Domain-Specific Language (DSL). Adapting legacy interpreters to evaluate v2.x logic introduces spatiotemporal drift, asynchronous event latencies, and artificial kinematic snapping. Addressing this execution gap, OSC2Runner introduces the first orchestration framework capable of natively mapping the OpenSCENARIO v2.x DSL to CARLA. The framework achieves this by formalizing scenario translation as a compilation pipeline through a multi-pass transpiler architecture. Bypassing static trajectory playback, the architecture synthesizes type-safe Abstract Syntax Trees directly into dynamic deterministic behavior trees (py_trees) natively mapped to CARLA's atomic APIs. Empirical validation in highly concurrent adversarial case studies demonstrates tick-by-tick determinism, exact spatial trigger evaluation, and 100.0 ms cross-actor blackboard synchronization. Kinematic analysis proves the strict adherence to continuous environmental boundaries. This architecture transitions Scenario-Based Testing from approximate behavioral interpretation to mathematically rigorous execution, establishing the deterministic backend required for co-simulation, hardware-in-the-loop testing, and automated LLM-driven generation pipelines.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents OSC2Runner, a framework for natively executing OpenSCENARIO 2.x DSL scenarios in CARLA. It uses a multi-pass transpiler to synthesize type-safe ASTs into dynamic py_trees mapped to CARLA atomic APIs, bypassing static trajectory playback. Empirical validation in concurrent adversarial cases shows tick-by-tick determinism, exact spatial trigger evaluation, 100 ms blackboard synchronization, and kinematic boundary adherence, claiming this establishes mathematically rigorous execution for scenario-based testing, co-simulation, and LLM-driven pipelines.
Significance. If the transpiler preserves exact v2.x semantics without introducing drift or latency, the work would provide a practical deterministic backend that addresses longstanding limitations of 1.x interpreters, enabling more reliable hardware-in-the-loop testing and automated scenario generation in autonomous vehicle research.
major comments (1)
- [Abstract] Abstract: The central claim that the architecture transitions Scenario-Based Testing to 'mathematically rigorous execution' and that 'kinematic analysis proves the strict adherence' is not supported by a formal semantic mapping, bisimulation, or equivalence proof between OpenSCENARIO 2.x constructs (including complex event chains and spatial triggers) and the generated py_trees. Only empirical results from selected adversarial cases are described, which cannot rule out untested divergences in timing, state updates, or nondeterministic scheduling as noted in the stress-test concern.
Simulated Author's Rebuttal
We thank the referee for the detailed feedback. We address the concern regarding the abstract claims below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the architecture transitions Scenario-Based Testing to 'mathematically rigorous execution' and that 'kinematic analysis proves the strict adherence' is not supported by a formal semantic mapping, bisimulation, or equivalence proof between OpenSCENARIO 2.x constructs (including complex event chains and spatial triggers) and the generated py_trees. Only empirical results from selected adversarial cases are described, which cannot rule out untested divergences in timing, state updates, or nondeterministic scheduling as noted in the stress-test concern.
Authors: We agree that the abstract overstates the contribution by using the phrases 'mathematically rigorous execution' and 'kinematic analysis proves the strict adherence' without providing a formal semantic mapping, bisimulation, or equivalence proof. The validation relies on empirical results from selected adversarial cases, which do not constitute a complete proof against all possible divergences. We will revise the abstract to remove these stronger claims and instead describe the empirical demonstration of tick-by-tick determinism, exact trigger evaluation, and boundary adherence in the evaluated scenarios. revision: yes
Circularity Check
No circularity: software architecture paper with empirical validation and no derivations or self-referential fits
full rationale
The manuscript describes an orchestration framework and multi-pass transpiler for mapping OpenSCENARIO v2.x to CARLA behavior trees. It presents empirical results on determinism and synchronization but contains no equations, fitted parameters, predictions derived from subsets of data, or load-bearing self-citations. The central claim of 'mathematically rigorous execution' is supported by tick-by-tick testing rather than any self-definitional reduction or ansatz smuggled via prior work. No step reduces by construction to its own inputs; the architecture is presented as an engineering artifact whose correctness is externally falsifiable via the reported adversarial cases. This matches the default expectation of a non-circular systems paper.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Driving to Safety: How Many Miles of Driving Would it take to Demonstrate Autonomous Vehicle Reliability?
N. Kalra and S. M. Paddock, “Driving to Safety: How Many Miles of Driving Would it take to Demonstrate Autonomous Vehicle Reliability?”Transportation Research Part A: Policy and Practice, vol. 94, pp. 182–193, 2016
2016
-
[2]
CARLA: An Open Urban Driving Simulator,
A. Dosovitskiy, G. Ros, F. Codevilla, A. Lopez, and V . Koltun, “CARLA: An Open Urban Driving Simulator,” in Proceedings of the 1st Annual Conference on Robot Learning, 2017, pp. 1–16
2017
-
[3]
ASAM OpenSCENARIO XML,
ASAM, “ASAM OpenSCENARIO XML,” 2020. [Online]. Available: https://www.asam.net/standards/detail/ openscenario-xml/
2020
-
[4]
ASAM OpenSCENARIO DSL 2.1.0,
——, “ASAM OpenSCENARIO DSL 2.1.0,” 2024. [Online]. Available: https://www.asam.net/standards/detail/ openscenario-dsl/
2024
-
[5]
ScenarioRunner for CARLA,
CARLA Team, “ScenarioRunner for CARLA,” 2024. [Online]. Available: https://github.com/carla-simulator/scenario_ runner
2024
-
[6]
Parr,The Definitive ANTLR 4 Reference
T. Parr,The Definitive ANTLR 4 Reference. Raleigh, North Carolina: The Pragmatic Bookshelf, 2013, torrossa Resource ID: 5241753
2013
-
[7]
Colledanchise and P
M. Colledanchise and P. Ögren,Behavior Trees in Robotics and AI: An Introduction. CRC Press, 2018
2018
-
[8]
Scenic: A Language for Scenario Specification and Scene Generation,
D. J. Fremont, T. Dreossi, S. Ghosh, X. Yue, A. L. Sangiovanni-Vincentelli, and S. A. Seshia, “Scenic: A Language for Scenario Specification and Scene Generation,” inProceedings of the 40th ACM SIGPLAN Conference on Programming Language Design and Implementation, 2019, pp. 63–78
2019
-
[9]
GeoScenario: An Open DSL for Autonomous Driving Scenario Representation,
R. Queiroz, C. Berger, and K. Czarnecki, “GeoScenario: An Open DSL for Autonomous Driving Scenario Representation,” in2019 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2019, pp. 287–294
2019
-
[10]
Paracosm: A Test Framework for Autonomous Driving Simulations,
R. Majumdar, A. Mathur, M. Pirron, L. Stegner, and D. Zufferey, “Paracosm: A Test Framework for Autonomous Driving Simulations,” pp. 172–195, 2021
2021
-
[11]
PMSF py-osc2 Framework,
P. R. Mai, “PMSF py-osc2 Framework,” 2024. [Online]. Available: https://github.com/PMSFIT/py-osc2 15
2024
-
[12]
Declarative Scenario-based Testing with RoadLogic,
E. Bartocci, A. Gambi, F. Gigler, and D. Nickovic, “Declarative Scenario-based Testing with RoadLogic,”arXiv preprint arXiv:2603.09455, 2026
-
[13]
The Y ASE Framework: Holistic Scenario Modeling with Behavior Trees,
M. P. Bauer, A. Ngo, and M. Resch, “The Y ASE Framework: Holistic Scenario Modeling with Behavior Trees,” in2021 IEEE 94th Vehicular Technology Conference (VTC2021-Fall), 2021, pp. 1–7
2021
-
[14]
System-level Simulation-based Verification of Autonomous Driving Systems with the VIV AS Framework and CARLA Simulator,
S. Goyal, A. Griggio, and S. Tonetta, “System-level Simulation-based Verification of Autonomous Driving Systems with the VIV AS Framework and CARLA Simulator,”Science of Computer Programming, vol. 242, p. 103253, 2025
2025
-
[15]
BeSimulator: A Large Language Model Powered Text-based Behavior Simulator,
J. Wang, B. Li, J. Qi, X. Wang, F. Li, and H. Li, “BeSimulator: A Large Language Model Powered Text-based Behavior Simulator,”arXiv preprint arXiv:2409.15865, 2024
-
[16]
Text2Scenario: Text-Driven Scenario Generation for Autonomous Driving Test,
X. Cai, X. Bai, Z. Cui, D. Xie, D. Fu, H. Yu, and Y . Ren, “Text2Scenario: Text-Driven Scenario Generation for Autonomous Driving Test,” pp. 102—-127, 2026
2026
-
[17]
Language Conditioned Traffic Generation,
S. Tan, B. Ivanovic, X. Weng, M. Pavone, and P. Kraehenbuehl, “Language Conditioned Traffic Generation,” 2023. [Online]. Available: https://arxiv.org/abs/2307.07947
-
[18]
Chat2scenario: Scenario Extraction from Dataset through Utilization of Large Language Model,
Y . Zhao, W. Xiao, T. Mihalj, J. Hu, and A. Eichberger, “Chat2scenario: Scenario Extraction from Dataset through Utilization of Large Language Model,” in2024 IEEE intelligent vehicles symposium (IV). IEEE, 2024, pp. 559–566
2024
-
[19]
LeGEND: A Top-Down Approach to Scenario Generation of Autonomous Driving Systems Assisted by Large Language Models,
S. Tang, Z. Zhang, J. Zhou, L. Lei, Y . Zhou, and Y . Xue, “LeGEND: A Top-Down Approach to Scenario Generation of Autonomous Driving Systems Assisted by Large Language Models,” inProceedings of the 39th IEEE/ACM International Conference on Automated Software Engineering (ASE), 2024, pp. 1497–1508
2024
-
[20]
Rajamani,Vehicle Dynamics and Control, 2nd ed
R. Rajamani,Vehicle Dynamics and Control, 2nd ed. New York, NY: Springer Science & Business Media, 2011
2011
-
[21]
Autoware on Board: Enabling Autonomous Vehicles with Embedded Systems,
S. Kato, S. Tokunaga, Y . Maruyama, S. Maeda, M. Hirabayashi, Y . Kitsukawa, A. Monrroy, T. Ando, Y . Fujii, and T. Azumi, “Autoware on Board: Enabling Autonomous Vehicles with Embedded Systems,” in2018 ACM/IEEE 9th International Conference on Cyber-Physical Systems (ICCPS). IEEE, 2018, pp. 287–296
2018
-
[22]
AUTOSAR-Compatible Level-4 Virtual ECU for the Verification of the Target Binary for Cloud-Native Development,
J. Choiet al., “AUTOSAR-Compatible Level-4 Virtual ECU for the Verification of the Target Binary for Cloud-Native Development,”Electronics, vol. 13, no. 18, p. 3704, 2024
2024
-
[23]
Digital Twin-Based Evaluation of Vehicular Controller Area Network Intrusion Detection Systems,
S. Ahmedet al., “Digital Twin-Based Evaluation of Vehicular Controller Area Network Intrusion Detection Systems,” International Journal on Perceptive and Cognitive Computing, vol. 11, no. 1, 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.