TACO: A Test and Check Framework for Robust Pose Graph Optimization
Pith reviewed 2026-07-01 06:50 UTC · model grok-4.3
The pith
TACO approximates the maximally consistent set of measurements in pose graph optimization incrementally by testing loop closures online and sanitizing errors with switchable constraints.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
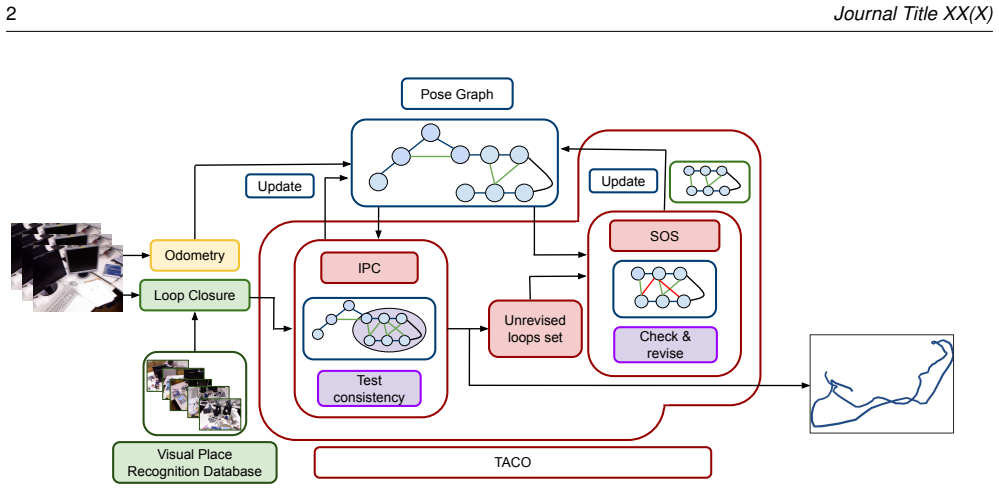
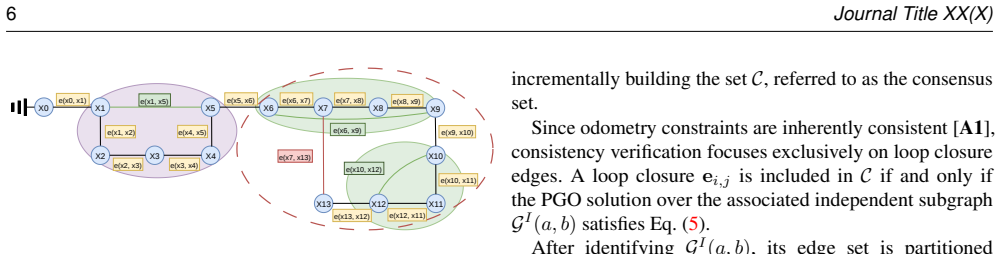
TACO finds an approximation to the maximally consistent set of measurements incrementally through two complementary components: the Incremental Probabilistic Consensus algorithm evaluates the consistency of each incoming loop closure online, and Switchable Outlier Sanitization leverages existing switchable constraints to periodically sanitize any inconsistent measurements that the first component may have included by mistake.
What carries the argument
The dual test-and-check structure of Incremental Probabilistic Consensus for online consistency evaluation paired with Switchable Outlier Sanitization for periodic cleanup of the accepted set.
If this is right
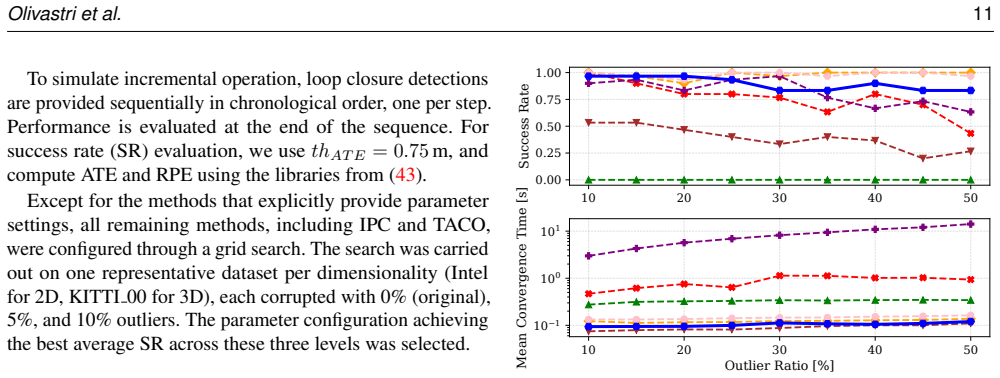
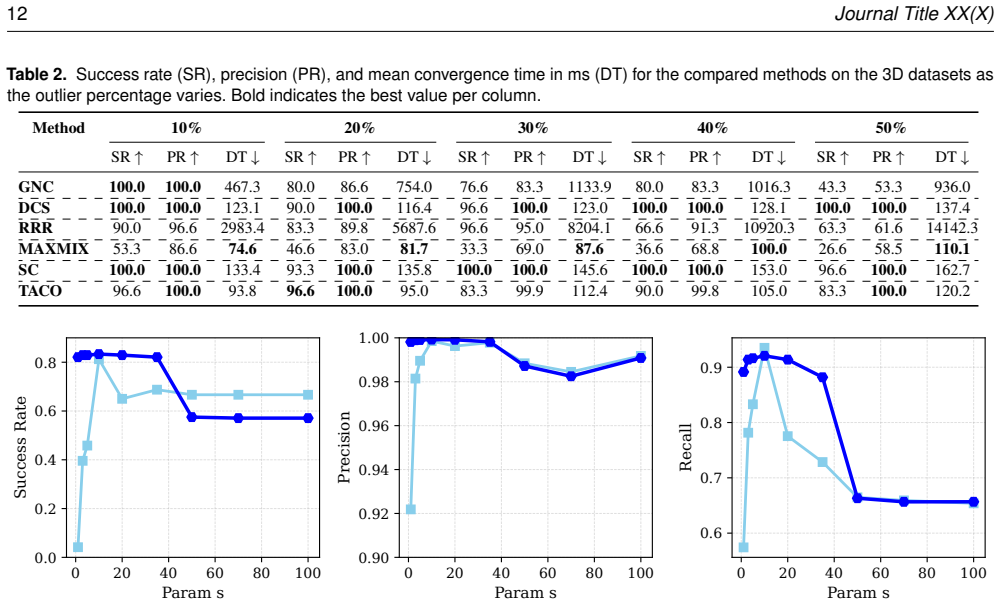
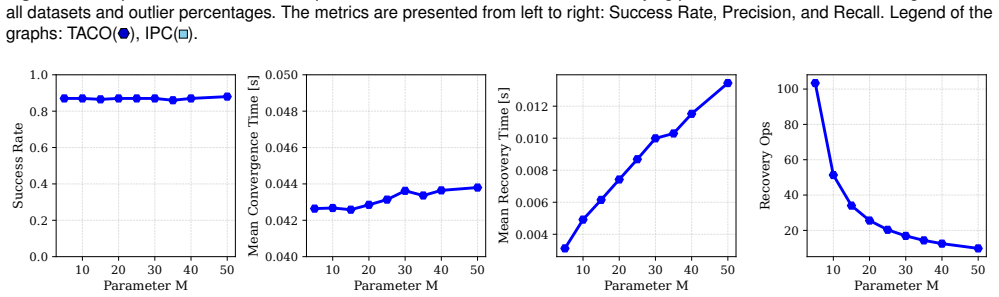
- Supports online robust pose graph optimization in both 2D and 3D SLAM with success rates above 90 percent in 2D and 83 percent in 3D at outlier rates up to 50 percent.
- Delivers mean convergence times of roughly 45 ms in 2D and 100 ms in 3D while retaining the efficiency needed for real-time use.
- Achieves robustness comparable to state-of-the-art offline methods without requiring batch processing of all measurements at once.
Where Pith is reading between the lines
- The incremental test-and-check pattern could be applied to other sequential estimation tasks that receive measurements one at a time and must tolerate occasional bad data.
- Periodic sanitization might be tuned to different outlier arrival patterns, such as bursts during rapid motion or perceptual aliasing in repetitive environments.
- Combining the approach with additional geometric checks on loop closures could further reduce the load on the sanitization step.
Load-bearing premise
That the Incremental Probabilistic Consensus algorithm can correctly evaluate the consistency of most incoming loop closures online and that switchable constraints can sanitize any remaining inconsistent measurements without degrading the optimization.
What would settle it
A sequence of loop closures where the Incremental Probabilistic Consensus algorithm accepts a large fraction of inconsistent measurements that the subsequent Switchable Outlier Sanitization step fails to remove, producing visibly degraded trajectory estimates compared with a ground-truth solution.
Figures
read the original abstract
Pose Graph Optimization (PGO) is one of the most widely adopted approaches for solving Simultaneous Localization and Mapping (SLAM) problems. However, PGO approaches are particularly sensitive to outliers, which can substantially degrade the quality of the estimated trajectories. These outliers arise from incorrect place recognition associations caused by perceptual aliasing in the environment. In this paper, we present TACO (short for Test And Check Optimization), a robust optimization framework designed to filter out outliers from PGO systems. Rather than explicitly modeling measurements as inliers or outliers, TACO finds an approximation to the maximally consistent set of measurements incrementally through two complementary components: (i) The test component, namely the Incremental Probabilistic Consensus (IPC) algorithm, evaluates the consistency of each incoming loop closure online. (ii) The check component dubbed Switchable Outlier Sanitization leverages the existing Switchable Constraints to periodically sanitize any inconsistent measurements from the consistent set that IPC may have mistakenly included. We evaluate TACO on 2D SLAM and 3D Visual SLAM datasets against several state-of-the-art methods. The results show robustness comparable to state-of-the-art offline methods while preserving the computational efficiency required for online deployment, achieving a success rate above 90% in 2D and 83% in 3D across outlier rates up to 50%, with mean convergence times of approximately 45 ms and 100 ms, respectively. We release an open-source implementation of our method with this paper.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents TACO, a robust PGO framework for SLAM that approximates the maximally consistent measurement set incrementally via two components: the Incremental Probabilistic Consensus (IPC) algorithm, which evaluates incoming loop-closure consistency online, and Switchable Outlier Sanitization, which periodically removes inconsistencies that IPC may have accepted. Experiments on 2D and 3D SLAM datasets report success rates above 90% (2D) and 83% (3D) at up to 50% outlier rates, with mean times of ~45 ms and ~100 ms, and an open-source implementation is released.
Significance. If validated, the test-and-check design offers a practical online alternative to explicit outlier modeling in PGO by leveraging existing switchable constraints, preserving efficiency while achieving robustness comparable to offline methods. The open-source release supports reproducibility.
major comments (3)
- [§3] §3 (IPC description): the claim that IPC correctly classifies most incoming loop closures online is load-bearing for the central incremental claim, yet no analysis is given of how an early false-positive acceptance shifts the pose-graph estimate and thereby corrupts subsequent consistency tests; the skeptic concern about a feedback loop is not addressed.
- [§4] §4 (Switchable Outlier Sanitization): the assertion that periodic sanitization corrects IPC mistakes is central to robustness, but the manuscript provides no convergence-rate analysis, required cycle count, or conditions under which the switch variables isolate remaining inconsistencies without destabilizing the incremental solver.
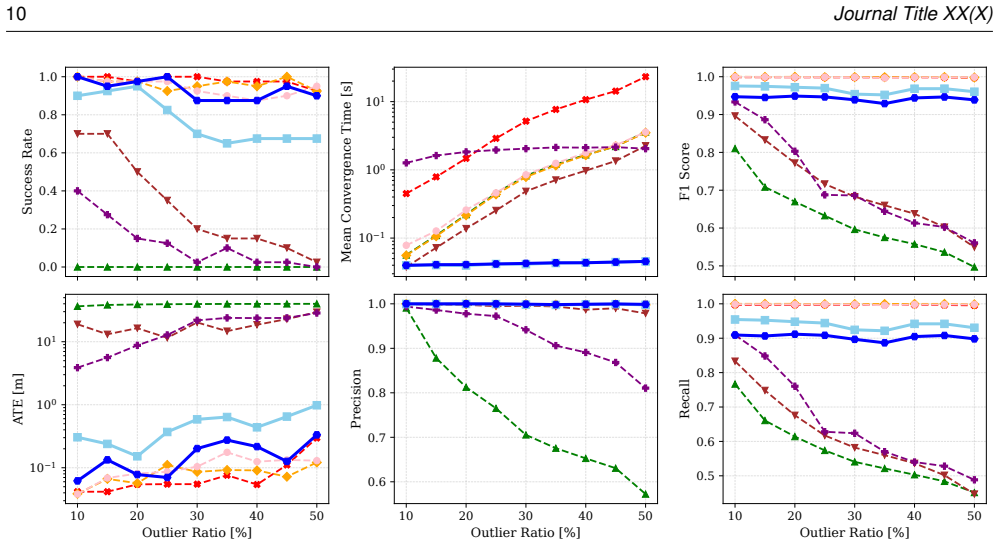
- [Experiments] Experiments (2D/3D results tables): success rates above 90%/83% are reported across outlier rates, but the text supplies no details on algorithm implementation, data handling, or error analysis, preventing verification that the data support the robustness claims.
minor comments (2)
- [Abstract] Abstract: the phrase 'mean convergence times' is used without defining what quantity is converging (e.g., solver iterations or full trajectory optimization).
- [§3] Notation: the probabilistic criterion inside IPC could be stated more explicitly with an equation to aid readers who have not studied the base IPC reference.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major point below and will revise the paper to incorporate additional analysis and details as outlined.
read point-by-point responses
-
Referee: [§3] §3 (IPC description): the claim that IPC correctly classifies most incoming loop closures online is load-bearing for the central incremental claim, yet no analysis is given of how an early false-positive acceptance shifts the pose-graph estimate and thereby corrupts subsequent consistency tests; the skeptic concern about a feedback loop is not addressed.
Authors: We agree that a dedicated analysis of how early false-positive acceptances in IPC could propagate errors and affect subsequent tests would strengthen the incremental claim. The manuscript's empirical results across multiple datasets with up to 50% outliers indicate that the overall framework remains robust, but this does not directly analyze the feedback-loop concern. We will add a new subsection to §3 providing a qualitative discussion of error propagation, supported by additional controlled experiments on synthetic graphs that isolate the effect of early misclassifications. revision: yes
-
Referee: [§4] §4 (Switchable Outlier Sanitization): the assertion that periodic sanitization corrects IPC mistakes is central to robustness, but the manuscript provides no convergence-rate analysis, required cycle count, or conditions under which the switch variables isolate remaining inconsistencies without destabilizing the incremental solver.
Authors: We acknowledge that the paper lacks a formal convergence-rate analysis or explicit conditions for the sanitization step. The current presentation relies on empirical evidence that periodic sanitization improves robustness. In revision we will expand §4 with observed cycle counts from the experiments, a brief discussion of stability conditions drawn from the switchable-constraints literature, and a note on when the periodic check is triggered to avoid destabilization of the incremental solver. revision: yes
-
Referee: [Experiments] Experiments (2D/3D results tables): success rates above 90%/83% are reported across outlier rates, but the text supplies no details on algorithm implementation, data handling, or error analysis, preventing verification that the data support the robustness claims.
Authors: We agree that additional implementation and data-handling details are required for verification. We will expand the Experiments section to describe the exact parameter settings for IPC and sanitization, the method used to inject outliers, the number of independent runs, and basic error statistics (means and standard deviations). The released open-source code already contains the full implementation; the revised text will reference the corresponding code sections. revision: yes
Circularity Check
No circularity: TACO is an algorithmic composition of prior components with empirical validation
full rationale
The paper describes TACO as an incremental framework that applies the existing Incremental Probabilistic Consensus (IPC) algorithm for online consistency testing and Switchable Constraints for periodic sanitization. No derivation chain, first-principles result, or prediction is claimed that reduces by construction to fitted parameters or self-referential definitions. The abstract and method explicitly build on established techniques without redefining them in terms of the new outputs. Evaluation consists of empirical success rates on external datasets rather than any closed-loop mathematical equivalence. No load-bearing self-citation or ansatz smuggling is present in the provided text.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Past, present, and future of simultaneous localization and mapping: Towards the robust- perception age.IEEE Transactions on Robotics2016; 32(6): 1309–1332
Cadena C, Carlone L, Carrillo H et al. Past, present, and future of simultaneous localization and mapping: Towards the robust- perception age.IEEE Transactions on Robotics2016; 32(6): 1309–1332
-
[2]
A tutorial on graph- based slam.IEEE Intelligent Transportation Systems Magazine 2010; 2(4): 31–43
Grisetti G, K¨ummerle R, Stachniss C et al. A tutorial on graph- based slam.IEEE Intelligent Transportation Systems Magazine 2010; 2(4): 31–43. DOI:10.1109/MITS.2010.939925
-
[3]
Scaramuzza D and Fraundorfer F. Visual odometry [tutorial]. IEEE Robotics and Automation Magazine2011; 18(4): 80–92. DOI:10.1109/MRA.2011.943233
-
[4]
Lidar odometry survey: recent advancements and remaining challenges.Intelligent Service Robotics2024; 17(2): 95–118
Lee D, Jung M, Yang W et al. Lidar odometry survey: recent advancements and remaining challenges.Intelligent Service Robotics2024; 17(2): 95–118
-
[5]
Schubert S, Neubert P, Garg S et al. Visual place recognition: A tutorial [tutorial].IEEE Robotics and Automation Magazine 2024; 31(3): 139–153. DOI:10.1109/MRA.2023.3310859
-
[6]
3d point cloud-based place recognition: a survey.Artificial Intelligence Review2024; 57(4): 83
Luo K, Yu H, Chen X et al. 3d point cloud-based place recognition: a survey.Artificial Intelligence Review2024; 57(4): 83
-
[7]
g2o: A general framework for (hyper) graph optimization
Grisetti G, K ¨ummerle R, Strasdat H et al. g2o: A general framework for (hyper) graph optimization. InIEEE International Conference on Robotics and Automation. pp. 9– 13
-
[8]
Dellaert F and Contributors G. borglab/gtsam, 2022. DOI: 10.5281/zenodo.5794541. URL https://github.com/ borglab/gtsam
-
[9]
Ceres Solver,
Agarwal S, Mierle K and Team TCS. Ceres Solver,
-
[10]
URL https://github.com/ceres-solver/ ceres-solver
-
[11]
A gauss—newton method for convex composite optimization.Mathematical Programming1995; 71(2): 179–194
Burke JV and Ferris MC. A gauss—newton method for convex composite optimization.Mathematical Programming1995; 71(2): 179–194
-
[12]
The levenberg-marquardt algorithm: implementation and theory
Mor´e JJ. The levenberg-marquardt algorithm: implementation and theory. InNumerical analysis: proceedings of the biennial Conference held at Dundee, June 28–July 1, 1977. pp. 105– 116
1977
-
[13]
Springer, 1999
Nocedal J and Wright SJ.Numerical optimization. Springer, 1999
1999
-
[14]
Se-sync: A certifiably correct algorithm for synchronization over the special euclidean group.The International Journal of Robotics Research2019; 38(2-3): 95–125
Rosen DM, Carlone L, Bandeira AS et al. Se-sync: A certifiably correct algorithm for synchronization over the special euclidean group.The International Journal of Robotics Research2019; 38(2-3): 95–125
-
[15]
Lsd-slam: Large-scale direct monocular slam
Engel J, Sch ¨ops T and Cremers D. Lsd-slam: Large-scale direct monocular slam. In Fleet D, Pajdla T, Schiele B et al. (eds.)European Conference on Computer Vision. ISBN 978-3- 319-10605-2, pp. 834–849
-
[16]
Campos C, Elvira R, Rodr ´ıguez JJG et al. Orb-slam3: An accurate open-source library for visual, visual–inertial, and multimap slam.IEEE Transactions on Robotics2021; 37(6): 1874–1890. DOI:10.1109/TRO.2021.3075644
-
[17]
Ldso: Direct sparse odometry with loop closure
Gao X, Wang R, Demmel N et al. Ldso: Direct sparse odometry with loop closure. InIEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 2198–2204. DOI: 10.1109/IROS.2018.8593376
-
[18]
Bimanual robot-assisted dressing: A spherical coordinate-based strategy for tight-fitting garments
Guadagnino T, Mersch B, Gupta S et al. KISS-SLAM: A Simple, Robust, and Accurate 3D LiDAR SLAM System With Enhanced Generalization Capabilities. InIEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 5363–5370. DOI:10.1109/IROS60139.2025.11246613
-
[19]
A general and adaptive robust loss function
Barron JT. A general and adaptive robust loss function. InIEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 4331–4339
-
[20]
Robust map optimization using dynamic covariance scaling
Agarwal P, Tipaldi GD, Spinello L et al. Robust map optimization using dynamic covariance scaling. InIEEE International Conference on Robotics and Automation. pp. 62–69
-
[21]
Randomized ransac with td, d test.Image and vision computing2004; 22(10): 837–842
Matas J and Chum O. Randomized ransac with td, d test.Image and vision computing2004; 22(10): 837–842
-
[22]
Pairwise consistent measurement set maximization for robust multi- robot map merging
Mangelson JG, Dominic D, Eustice RM et al. Pairwise consistent measurement set maximization for robust multi- robot map merging. InIEEE International Conference on Robotics and Automation. pp. 2916–2923
-
[23]
Clipper: A graph-theoretic framework for robust data association
Lusk PC, Fathian K and How JP. Clipper: A graph-theoretic framework for robust data association. InIEEE International Conference on Robotics and Automation. pp. 13828–13834
-
[24]
Data association in stochastic mapping using the joint compatibility test.IEEE Transactions on Robotics and Automation2001; 17(6): 890–897
Neira J and Tard´os JD. Data association in stochastic mapping using the joint compatibility test.IEEE Transactions on Robotics and Automation2001; 17(6): 890–897
-
[25]
Graduated non- convexity for robust spatial perception: From non-minimal solvers to global outlier rejection.IEEE Robotics and Automation Letters2020; 5(2): 1127–1134
Yang H, Antonante P, Tzoumas V et al. Graduated non- convexity for robust spatial perception: From non-minimal solvers to global outlier rejection.IEEE Robotics and Automation Letters2020; 5(2): 1127–1134
-
[26]
Robust incremental smoothing and mapping (risam)
McGann D, Rogers JG and Kaess M. Robust incremental smoothing and mapping (risam). InIEEE International Conference on Robotics and Automation. pp. 4157–4163. Prepared usingsagej.cls Olivastri et al. 15
-
[27]
Switchable constraints for robust pose graph slam
S¨underhauf N and Protzel P. Switchable constraints for robust pose graph slam. InIEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 1879–1884
-
[28]
IPC: Incremental probabilistic consensus-based consistent set maximization for SLAM backends
Olivastri E and Pretto A. IPC: Incremental probabilistic consensus-based consistent set maximization for SLAM backends. InIEEE International Conference on Robotics and Automation. pp. 10283–10289. DOI:10.1109/ICRA57147. 2024.10611214
-
[29]
Cambridge University Press, 2025
Carlone L, Kim A, Barfoot T et al.SLAM handbook: From localization and mapping to spatial intelligence. Cambridge University Press, 2025
2025
-
[30]
On the unification of line processes, outlier rejection, and robust statistics with applications in early vision.International Journal of Computer Vision1996; 19(1): 57–91
Black MJ and Rangarajan A. On the unification of line processes, outlier rejection, and robust statistics with applications in early vision.International Journal of Computer Vision1996; 19(1): 57–91
-
[31]
Aeros: Adaptive robust least-squares for graph-based slam.Frontiers in Robotics and AI2022; 9: 789444
Ramezani M, Mattamala M and Fallon M. Aeros: Adaptive robust least-squares for graph-based slam.Frontiers in Robotics and AI2022; 9: 789444
-
[32]
isam2: Incremental smoothing and mapping using the bayes tree.The International Journal of Robotics Research2012; 31(2): 216–235
Kaess M, Johannsson H, Roberts R et al. isam2: Incremental smoothing and mapping using the bayes tree.The International Journal of Robotics Research2012; 31(2): 216–235
-
[33]
Inference on networks of mixtures for robust robot mapping.The International Journal of Robotics Research2013; 32(7): 826–840
Olson E and Agarwal P. Inference on networks of mixtures for robust robot mapping.The International Journal of Robotics Research2013; 32(7): 826–840
-
[34]
Selecting good measurements via l1 relaxation: A convex approach for robust estimation over graphs
Carlone L, Censi A and Dellaert F. Selecting good measurements via l1 relaxation: A convex approach for robust estimation over graphs. InIEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 2667–2674
-
[35]
Robin: a graph-theoretic approach to reject outliers in robust estimation using invariants
Shi J, Yang H and Carlone L. Robin: a graph-theoretic approach to reject outliers in robust estimation using invariants. InIEEE International Conference on Robotics and Automation. pp. 13820–13827
-
[36]
Robust loop closing over time for pose graph slam.The International Journal of Robotics Research2013; 32(14): 1611–1626
Latif Y , Cadena C and Neira J. Robust loop closing over time for pose graph slam.The International Journal of Robotics Research2013; 32(14): 1611–1626
-
[37]
Cluster-based penalty scaling for robust pose graph optimization.IEEE Robotics and Automation Letters2020; 5(4): 6193–6200
Wu F and Beltrame G. Cluster-based penalty scaling for robust pose graph optimization.IEEE Robotics and Automation Letters2020; 5(4): 6193–6200
-
[38]
Loam: Lidar odometry and mapping in real-time
Zhang J, Singh S et al. Loam: Lidar odometry and mapping in real-time. InRobotics: Science and systems, volume 2. Berkeley, CA, pp. 1–9
-
[39]
Stereo dso: Large-scale direct sparse visual odometry with stereo cameras
Wang R, Schworer M and Cremers D. Stereo dso: Large-scale direct sparse visual odometry with stereo cameras. InIEEE International Conference on Computer Vision. pp. 3903–3911
-
[40]
Galvez-L´opez D and Tardos JD. Bags of binary words for fast place recognition in image sequences.IEEE Transactions on Robotics2012; 28(5): 1188–1197. DOI:10.1109/TRO.2012. 2197158
-
[41]
Kiss-matcher: Fast and robust point cloud registration revisited
Lim H, Kim D, Shin G et al. Kiss-matcher: Fast and robust point cloud registration revisited. InIEEE International Conference on Robotics and Automation. pp. 11104–11111
-
[42]
Visual place recognition: A tutorial [tutorial].IEEE Robotics & Automation Magazine 2023; 31(3): 139–153
Schubert S, Neubert P, Garg S et al. Visual place recognition: A tutorial [tutorial].IEEE Robotics & Automation Magazine 2023; 31(3): 139–153
2023
-
[43]
Robust optimization of factor graphs by using condensed measurements
Grisetti G, K ¨ummerle R and Ni K. Robust optimization of factor graphs by using condensed measurements. InIEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 581–588
-
[44]
Hipe: Hierarchical initialization for pose graphs.IEEE Robotics and Automation Letters2021; 7(1): 287–294
Guadagnino T, Di Giammarino L and Grisetti G. Hipe: Hierarchical initialization for pose graphs.IEEE Robotics and Automation Letters2021; 7(1): 287–294
-
[45]
The steiner cycle polytope.European Journal of Operational Research2003; 147(3): 671–679
Salazar-Gonz´alez JJ. The steiner cycle polytope.European Journal of Operational Research2003; 147(3): 671–679
-
[46]
A fast and accurate approximation for planar pose graph optimization
Carlone L, Aragues R, Castellanos JA et al. A fast and accurate approximation for planar pose graph optimization. The International Journal of Robotics Research2014; 33(7): 965–987
-
[47]
A note on two problems in connexion with graphs
Dijkstra EW. A note on two problems in connexion with graphs. Numerische Mathematik1959; : 269–271
-
[48]
Evaluating the performance of map optimization algorithms
Olson E and Kaess M. Evaluating the performance of map optimization algorithms. InRSS Workshop on Good Experimental Methodology in Robotics, volume 15. p. 35
-
[49]
Reliable graphs for slam.The International Journal of Robotics Research2019; 38(2-3): 260–298
Khosoussi K, Giamou M, Sukhatme GS et al. Reliable graphs for slam.The International Journal of Robotics Research2019; 38(2-3): 260–298
-
[50]
A tutorial on quantitative trajectory evaluation for visual (-inertial) odometry
Zhang Z and Scaramuzza D. A tutorial on quantitative trajectory evaluation for visual (-inertial) odometry. In IEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 7244–7251
-
[51]
From angular manifolds to the integer lattice: Guaranteed orientation estimation with application to pose graph optimization.IEEE Transactions on Robotics2014; 30(2): 475–492
Carlone L and Censi A. From angular manifolds to the integer lattice: Guaranteed orientation estimation with application to pose graph optimization.IEEE Transactions on Robotics2014; 30(2): 475–492
-
[52]
Are we ready for autonomous driving? the kitti vision benchmark suite
Geiger A, Lenz P and Urtasun R. Are we ready for autonomous driving? the kitti vision benchmark suite. InIEEE Conference on Computer Vision and Pattern Recognition. pp. 3354–3361
-
[53]
A benchmark for the evaluation of rgb-d slam systems
Sturm J, Engelhard N, Endres F et al. A benchmark for the evaluation of rgb-d slam systems. InIEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 573–580
-
[54]
Vertigo (versatile extensions for robust inference using graph optimization) source code,
Suenderhauf N and Protzel P. Vertigo (versatile extensions for robust inference using graph optimization) source code,
-
[55]
URL https:// openslam-org.github.io/vertigo.html
DOI:10.25912/5dcb33f1400ec. URL https:// openslam-org.github.io/vertigo.html. Prepared usingsagej.cls
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.