Robust Image Processing Techniques for Construction Environment Monitoring Using Underwater Robots
Pith reviewed 2026-07-03 15:54 UTC · model grok-4.3
The pith
Staged modeling of forward scattering and marine snow in synthetic data improves real underwater image quality for robots.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By sequentially modeling background degradation via depth-aware forward scattering and foreground degradation using realistic marine snow patterns extracted from real images, the resulting synthetic data are used to retrain an existing Joint-ID network without modifying its architecture; a lightweight post-processing scheme then enhances contrast and structural clarity, producing consistent improvements in visual quality and UIQM scores on real underwater datasets collected in Korean coastal environments and thereby reducing the synthetic-to-real gap for practical robotic operations.
What carries the argument
The staged processing pipeline that sequentially models background degradation via depth-aware forward scattering and foreground degradation using realistic marine snow patterns extracted from real images.
If this is right
- Consistent improvements appear in visual quality and UIQM scores on real underwater datasets from Korean coastal environments.
- Explicit modeling of forward scattering and particle effects narrows the synthetic-to-real gap for underwater image tasks.
- Practical applicability increases for underwater robotic operations in construction monitoring without network redesign.
- Lightweight post-processing further boosts contrast and structural clarity on the processed images.
Where Pith is reading between the lines
- The same staged synthetic-data approach could be tested on other vision tasks such as object detection or 3-D reconstruction in the same underwater setting.
- Similar depth-dependent and particle-based modeling might transfer to land-based robotic vision under fog or dust where comparable layered degradations occur.
- Varying the extracted marine-snow density or the depth range used in forward-scattering simulation would provide a direct test of how sensitive the gains are to those parameters.
Load-bearing premise
The synthetic data produced by the staged depth-aware forward scattering and real-extracted marine snow modeling is realistic enough that retraining the unmodified Joint-ID network on it will produce measurable gains on real images.
What would settle it
Retraining the Joint-ID network on the generated synthetic dataset and evaluating it on the real Korean coastal underwater datasets shows no improvement or a decrease in UIQM scores and visual quality compared with the original network.
Figures
read the original abstract
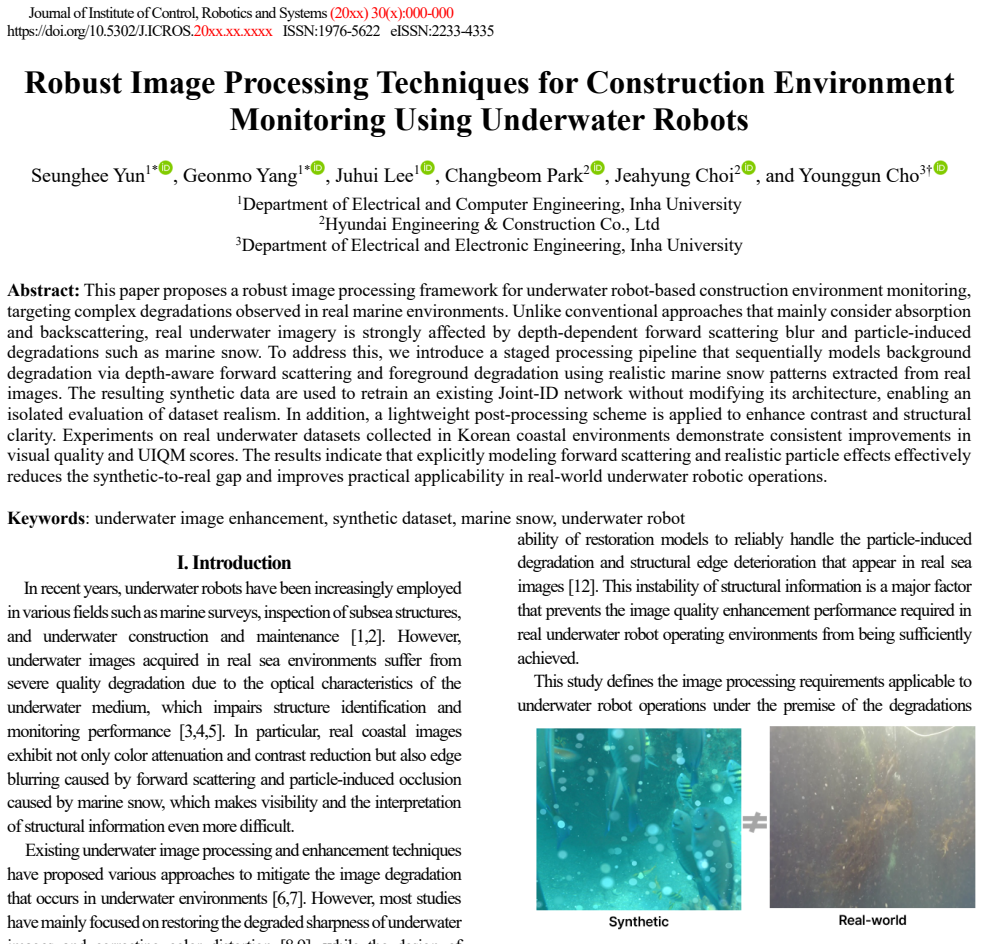
This paper proposes a robust image processing framework for underwater robot-based construction environment monitoring, targeting complex degradations observed in real marine environments. Unlike conventional approaches that mainly consider absorption and backscattering, real underwater imagery is strongly affected by depth-dependent forward scattering blur and particle-induced degradations such as marine snow. To address this, we introduce a staged processing pipeline that sequentially models background degradation via depth-aware forward scattering and foreground degradation using realistic marine snow patterns extracted from real images. The resulting synthetic data are used to retrain an existing Joint-ID network without modifying its architecture, enabling an isolated evaluation of dataset realism. In addition, a lightweight post-processing scheme is applied to enhance contrast and structural clarity. Experiments on real underwater datasets collected in Korean coastal environments demonstrate consistent improvements in visual quality and UIQM scores. The results indicate that explicitly modeling forward scattering and realistic particle effects effectively reduces the synthetic-to-real gap and improves practical applicability in real-world underwater robotic operations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a staged synthetic data generation pipeline for underwater images that sequentially models depth-aware forward scattering for background degradation followed by foreground marine snow patterns extracted from real images. This data is used to retrain an unmodified Joint-ID network (with an added lightweight post-processing step for contrast enhancement) to isolate the effect of dataset realism. Experiments on real Korean coastal underwater datasets are reported to yield consistent gains in visual quality and UIQM scores, supporting the claim that explicit modeling of forward scattering and particle effects reduces the synthetic-to-real gap for underwater robotic construction monitoring.
Significance. If the central claim can be substantiated with controlled comparisons, the work would offer a practical contribution to underwater computer vision by showing that targeted synthetic data realism can improve performance of existing networks without architectural changes, with potential applicability to marine robotics.
major comments (2)
- [Experiments] Experiments section: The manuscript reports UIQM and visual improvements after retraining on the proposed synthetic data but provides no ablation studies or baselines comparing against alternative synthetic data generators (e.g., standard Jaffe-McGlamery model, simple depth-dependent attenuation, or random particle overlays). This omission prevents isolation of the contribution from the staged forward-scattering + real-extracted marine snow pipeline, directly undermining the central claim that this specific modeling reduces the synthetic-to-real gap.
- [Abstract and Experiments] Abstract and Experiments: No quantitative baselines, statistical significance tests, or details on synthetic data parameter selection (e.g., scattering coefficients or particle density distributions) are provided, leaving the reported UIQM gains without context for assessing effect size or reproducibility.
minor comments (1)
- [Abstract] The abstract introduces the 'Joint-ID network' without a citation or brief description, which reduces clarity for readers outside the immediate subfield.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major comment point by point below and describe the revisions we will make to strengthen the presentation of our contributions.
read point-by-point responses
-
Referee: [Experiments] The manuscript reports UIQM and visual improvements after retraining on the proposed synthetic data but provides no ablation studies or baselines comparing against alternative synthetic data generators (e.g., standard Jaffe-McGlamery model, simple depth-dependent attenuation, or random particle overlays). This omission prevents isolation of the contribution from the staged forward-scattering + real-extracted marine snow pipeline, directly undermining the central claim that this specific modeling reduces the synthetic-to-real gap.
Authors: We agree that direct comparisons to alternative synthetic data generators would more rigorously isolate the contribution of the staged forward-scattering and real-extracted marine snow pipeline. Our experimental design focused on isolating dataset realism by retraining an unmodified Joint-ID network, but we acknowledge this does not fully address comparisons to other models. In the revised manuscript we will add ablation studies comparing our pipeline against the Jaffe-McGlamery model, simple depth-dependent attenuation, and random particle overlays to better substantiate the specific benefits claimed. revision: yes
-
Referee: [Abstract and Experiments] No quantitative baselines, statistical significance tests, or details on synthetic data parameter selection (e.g., scattering coefficients or particle density distributions) are provided, leaving the reported UIQM gains without context for assessing effect size or reproducibility.
Authors: We will revise the Experiments section and abstract to include details on synthetic data parameter selection, including the specific ranges and distributions used for scattering coefficients and particle densities. We will also add quantitative baselines and statistical significance tests (e.g., paired t-tests on UIQM scores) where the data permit, to provide context for effect sizes and improve reproducibility. These changes will be incorporated in the next version. revision: yes
Circularity Check
No significant circularity; claims evaluated on external real datasets without reduction to fitted inputs or self-citations.
full rationale
The paper's pipeline generates synthetic data via depth-aware forward scattering and marine snow patterns extracted from real images, retrains an unmodified Joint-ID network, and reports UIQM/visual improvements on separate real Korean coastal datasets. No equations, derivations, or claims reduce by construction to the same data used for testing or to self-citation chains; the evaluation remains externally falsifiable against real benchmarks, satisfying the default expectation of non-circularity.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Journal of Institute of Control, Robotics and Systems (20xx) 30(x):000-000 https://doi.org/10.5302/J.ICROS.20xx.xx.xxxx ISSN:1976-5622 eISSN:2233-4335 Robust Image Processing Techniques for Construction Environment Monitoring Using Underwater Robots Seunghee Yun1*, Geonmo Yang1*, Juhui Lee1, Changbeom Park2, Jeahyung Choi2, and Younggun Cho3† 1Department ...
-
[2]
Underwater inspection and monitoring: Technologies for autonomous operations
Ioannou, Giorgio, et al. "Underwater inspection and monitoring: Technologies for autonomous operations." IEEE Aerospace and Electronic Systems Magazine 39.5 (2024): 4-16
2024
-
[3]
Autonomous inspection of underwater structures
Jacobi, Marco. "Autonomous inspection of underwater structures." Robotics and Autonomous Systems 67 (2015): 80-86
2015
-
[4]
Computer modeling and the design of optimal underwater imaging systems
Jaffe, Jules S. "Computer modeling and the design of optimal underwater imaging systems." IEEE journal of oceanic engineering 15.2 (2002): 101-111
2002
-
[5]
Joint-id: Transformer-based joint image enhancement and depth estimation for underwater environments
Yang, Geonmo, et al. "Joint-id: Transformer-based joint image enhancement and depth estimation for underwater environments." IEEE Sensors Journal 24.3 (2023): 3113-3122. doi: 10.1109/JSEN.2023.3338730
-
[6]
Yang, Geonmo, and Younggun Cho. "TRIDENT: Efficient Triple-Task Learning of Dehazing, Depth and Uncertainty Estimation for Underwater 3D Robot Visual Perception." IEEE Sensors Journal (2024). doi: 10.1109/JSEN.2024.3488495
-
[7]
UDAformer: Underwater image enhancement based on dual attention transformer
Shen, Zhen, et al. "UDAformer: Underwater image enhancement based on dual attention transformer." Computers & Graphics 111 (2023): 77-88
2023
-
[8]
Reinforced swin-convs transformer for simultaneous underwater sensing scene image enhancement and super-resolution
Ren, Tingdi, et al. "Reinforced swin-convs transformer for simultaneous underwater sensing scene image enhancement and super-resolution." IEEE Transactions on Geoscience and Remote Sensing 60 (2022): 1-16
2022
-
[9]
WaterGAN: Unsupervised generative network to enable real-time color correction of monocular underwater images
Li, Jie, et al. "WaterGAN: Unsupervised generative network to enable real-time color correction of monocular underwater images." IEEE Robotics and Automation letters 3.1 (2017): 387-394
2017
-
[10]
Marine snow removal benchmarking dataset
Kaneko, Reina, et al. "Marine snow removal benchmarking dataset." 2023 Asia Pacific Signal and Information Processing Association Annual Summit and Conference (APSIP A ASC). IEEE,
2023
-
[11]
Constraining the particle size distribution of large marine particles in the global ocean with in situ optical observations and supervised learning
Clements, D. J., et al. "Constraining the particle size distribution of large marine particles in the global ocean with in situ optical observations and supervised learning." Global Biogeochemical Cycles 36.5 (2022): e2021GB007276
2022
-
[12]
PHISWID: Physics-inspired underwater image dataset synthesized from RGB-D images,
R. Kaneko, T. Ueda, H. Higashi, and Y . Tanaka, "PHISWID: Physics-inspired underwater image dataset synthesized from RGB-D images," arXiv preprint arXiv:2404.03998,
-
[13]
Enhancing underwater imagery using generative adversarial networks,
C. Fabbri, M. J. Islam, and J. Sattar, "Enhancing underwater imagery using generative adversarial networks," in Proc. IEEE Int. Conf. Robot. Autom. (ICRA), Brisbane, Australia, May 2018, pp. 7159–7165
2018
-
[14]
A deep learning approach for marine snow synthesis and removal
Galetto, Fernando, and Guang Deng. "A deep learning approach for marine snow synthesis and removal." Signal, Image and Video Processing 19.1 (2025):
2025
-
[15]
Atlantis: Enabling underwater depth estimation with Stable Diffusion,
F. Zhang, S. You, Y . Li, and Y . Fu, "Atlantis: Enabling underwater depth estimation with Stable Diffusion," in Proc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), Seattle, W A, USA, Jun. 2024, pp. 11852–11861
2024
-
[16]
GenDeg: Diffusion-based degradation synthesis for generalizable all-in-one image restoration,
S. Rajagopalan, N. G. Nair, J. N. Paranjape, and V . M. Patel, "GenDeg: Diffusion-based degradation synthesis for generalizable all-in-one image restoration," in Proc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), 2025, pp. 28144–28154
2025
-
[17]
Self-tuning underwater image restoration
Trucco, Emanuele, and Adriana T. Olmos-Antillon. "Self-tuning underwater image restoration." IEEE Journal of Oceanic Engineering 31.2 (2006): 511-519
2006
-
[18]
Human-visual-system-inspired underwater image quality measures
Panetta, Karen, Chen Gao, and Sos Agaian. "Human-visual-system-inspired underwater image quality measures." IEEE Journal of Oceanic Engineering 41.3 (2015): 541-551. Seunghee Yun 2025 B.S. in Mechanical Engineering, Kookmin University. 2025-present: M.S. student, Department of Electrical and Computer Engineering, Inha University. Research interests includ...
2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.