Distributed Optimal Guidance Laws for Multiple Unmanned Aerial Vehicles Attacking A Moving Target
Pith reviewed 2026-05-25 15:47 UTC · model grok-4.3
The pith
Distributed guidance laws allow multiple UAVs to attack a moving target simultaneously by equalizing relative distance reduction rates along lines of sight.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
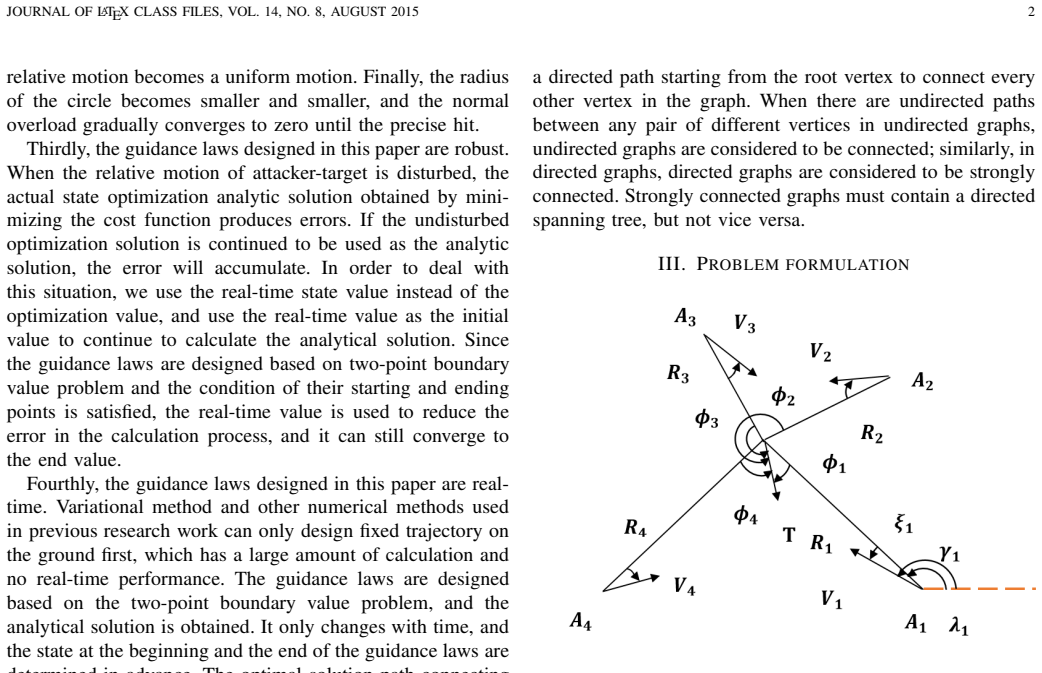
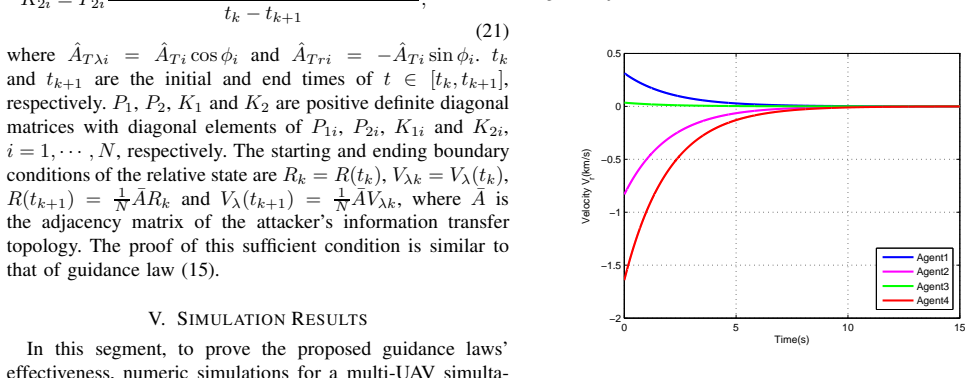
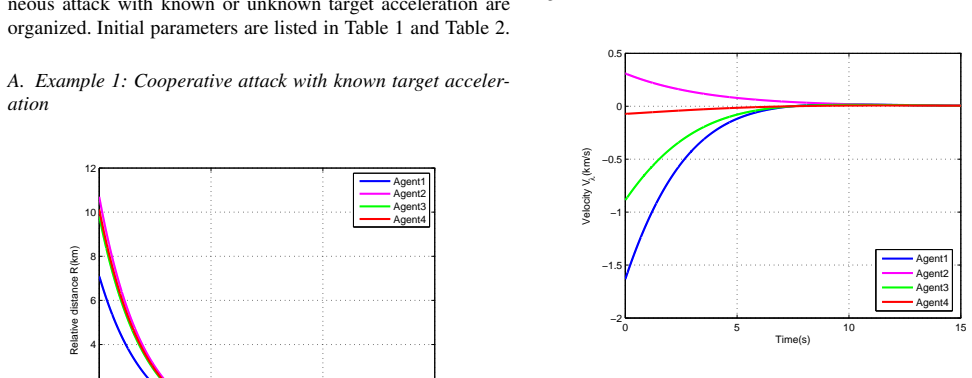
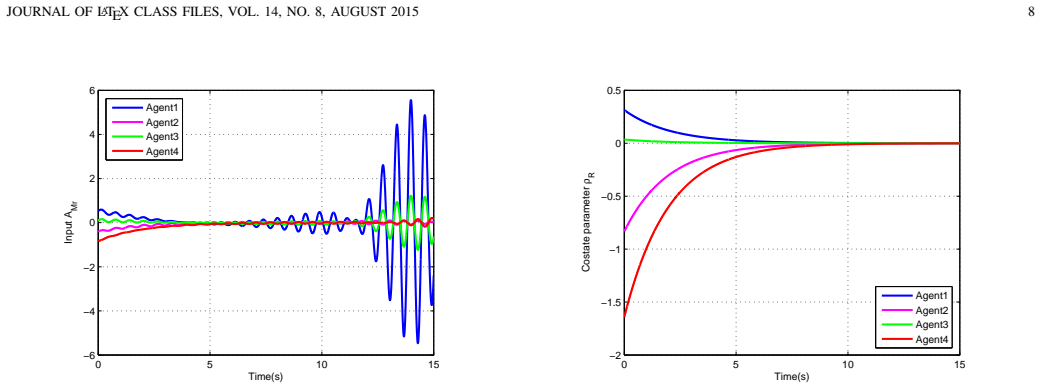
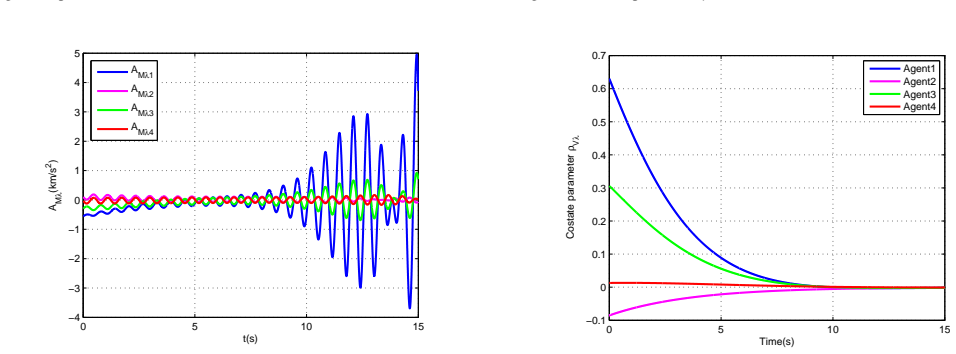
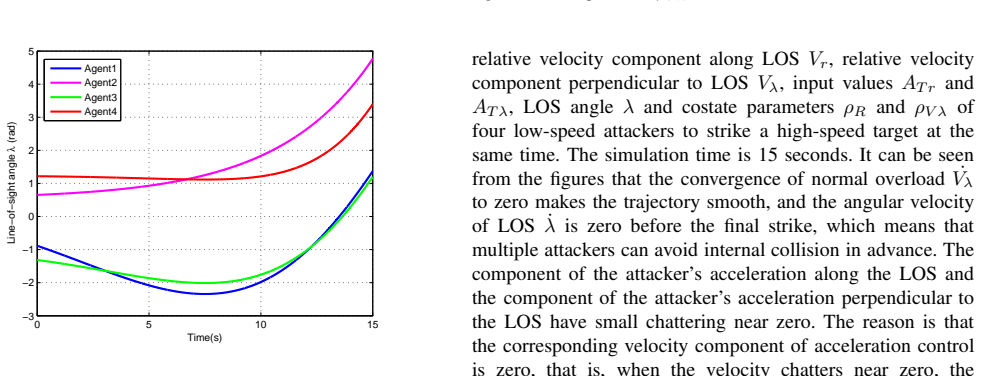
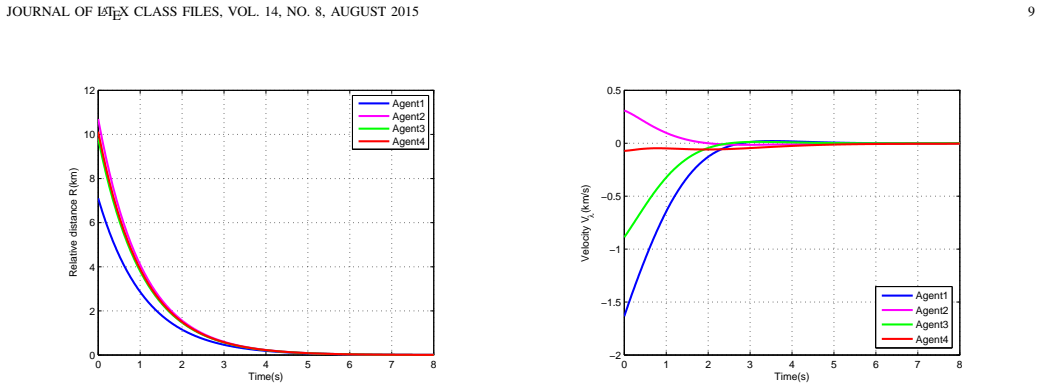
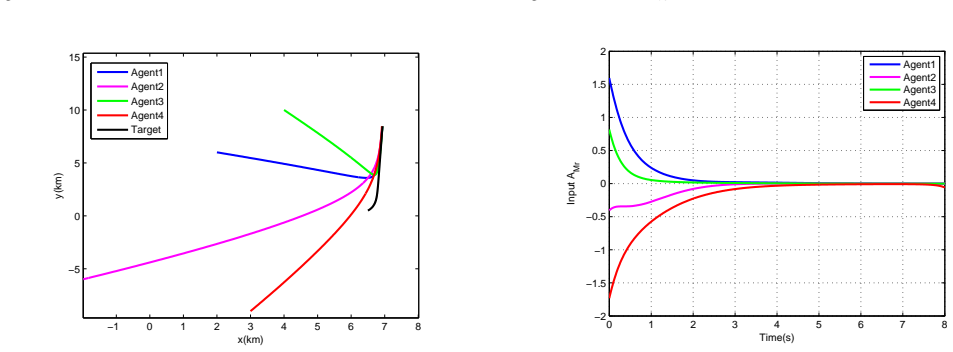
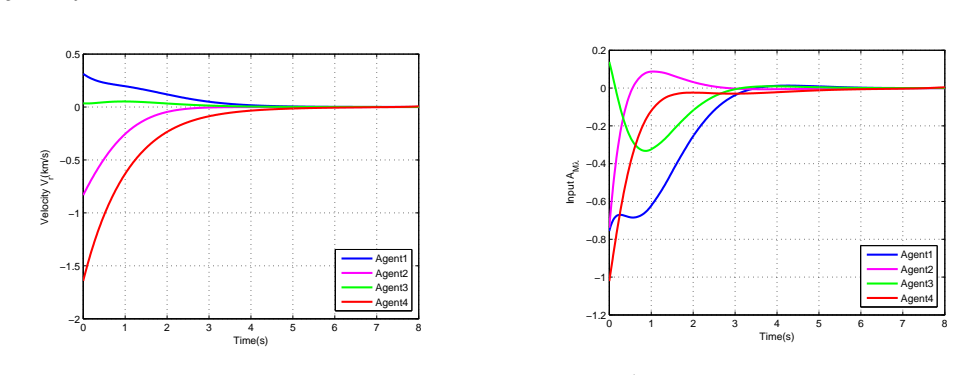
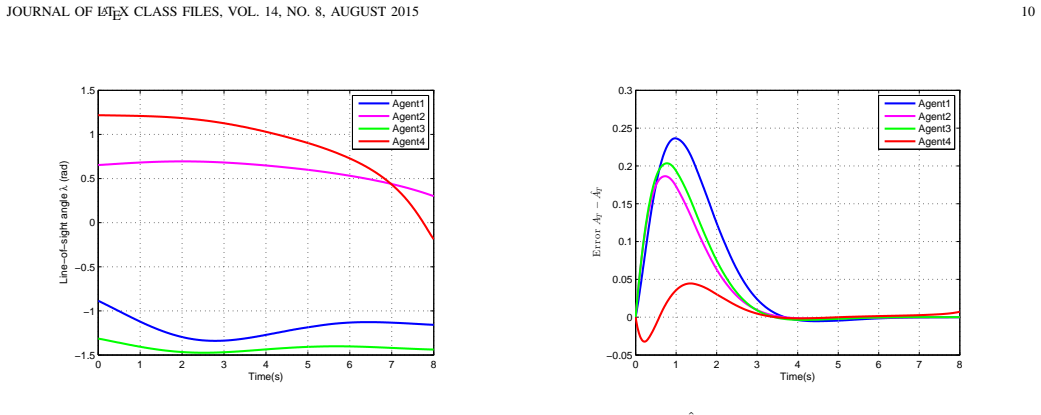
The central claim is that the acceleration components along the attacker-target line of sight in the novel guidance laws reduce the relative remaining distance between each of the attackers and the target at the same speed, thus completing simultaneous attack and avoiding the calculation of the remaining time, while the components perpendicular to the attacker-target line of sight make the normal overload of relative motion zero so that the trajectory will be smooth and the collision problem within the attackers can be avoided.
What carries the argument
Two-point boundary value based cooperative guidance laws that decompose acceleration into line-of-sight components equalizing closing rates and perpendicular components nulling normal overload.
If this is right
- Simultaneous attack occurs without explicit calculation of remaining flight time.
- Trajectories remain smooth because normal overload in relative motion is zero.
- Intra-attacker collisions are avoided by the perpendicular acceleration design.
- The laws function for both known and unknown target acceleration.
- Only minimal network connectivity and partial target observation are needed.
Where Pith is reading between the lines
- The same decomposition could apply to other multi-agent synchronization tasks where arrival timing matters more than individual paths.
- Eliminating time-to-go estimates may reduce real-time computational demands on vehicle processors.
- The approach could be tested for robustness by adding communication delays to the directed spanning tree condition.
- Hardware flight tests with actual UAVs would check whether the zero-overload property holds under wind and sensor noise.
Load-bearing premise
The multi-attacker communication network contains a directed spanning tree and at least one attacker can observe the target.
What would settle it
A simulation run with the proposed laws on a communication network lacking a directed spanning tree in which the attackers fail to reach the target at the same time.
Figures
read the original abstract
In this paper, two cooperative guidance laws based on two-point boundary value are designed to deal with the problem of cooperative encirclement and simultaneous attack under condition of both known target acceleration and unknown target acceleration. The only requirement for the multi-attacker communication network is that it contains a directed spanning tree. The guidance laws can function properly as long as at least one attacker can observed the target. The acceleration components along the attacker-target line of sight in the novel guidance laws can reduce the relative remaining distance between each of the attackers and the target at the same speed, thus completing simultaneous attack and avoiding the calculation of the remaining time. The components of the guidance laws perpendicular to the attacker-target line of sight can make the normal overload of relative motion zero, so that the trajectory will be smooth and the collision problem within the attacker can be avoided. Simulation results verified the practicability of the novel guidance laws.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes two cooperative guidance laws derived from two-point boundary value methods for multiple UAVs to achieve simultaneous attack (and encirclement) on a moving target. The laws are distributed, requiring only a directed spanning tree in the communication graph with at least one attacker observing the target; they decompose commanded acceleration into line-of-sight (LOS) and perpendicular components. The LOS terms are asserted to reduce each attacker-target range at identical rates, thereby guaranteeing equal arrival times without explicit time-to-go computation, while the perpendicular terms null normal overload to produce smooth, collision-free trajectories. Verification is stated to rest on simulation results.
Significance. If the central range-reduction mechanism can be shown to equalize impact times for arbitrary initial ranges, the approach would supply a distributed, time-to-go-free guidance law that leverages only standard boundary-value techniques and minimal network connectivity. This would be of interest for multi-agent intercept problems where explicit synchronization is undesirable. The manuscript does not, however, supply machine-checked derivations, reproducible code, or falsifiable analytic predictions that would strengthen the result.
major comments (2)
- [Abstract] Abstract (third sentence): the assertion that the LOS acceleration components 'reduce the relative remaining distance between each of the attackers and the target at the same speed, thus completing simultaneous attack and avoiding the calculation of the remaining time' is not supported for unequal initial ranges. If the closing rates are identical while the initial ranges differ, the individual times-to-go (= range / closing rate) necessarily differ; the perpendicular components are stated only to null normal overload and do not compensate for timing mismatch. Because this range-reduction property is presented as the mechanism that replaces explicit time-to-go computation, the claim is load-bearing for the headline result.
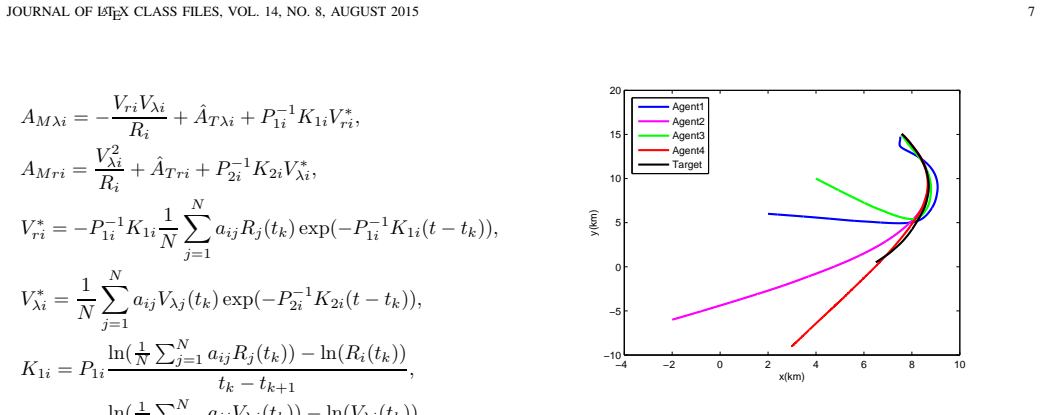
- [Abstract] Abstract (final sentence) and throughout: the verification statement 'Simulation results verified the practicability of the novel guidance laws' supplies no information on initial conditions (in particular whether ranges are identical), network topology realization, baseline comparators, error metrics, or Monte-Carlo statistics. Without these details the distributed claim and the range-equalization property cannot be assessed.
minor comments (1)
- [Abstract] Abstract: the two laws (known vs. unknown target acceleration) are introduced but never distinguished in the provided description; a brief statement of their structural difference would improve clarity.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive review. Below we respond to each major comment and indicate planned revisions to the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract (third sentence): the assertion that the LOS acceleration components 'reduce the relative remaining distance between each of the attackers and the target at the same speed, thus completing simultaneous attack and avoiding the calculation of the remaining time' is not supported for unequal initial ranges. If the closing rates are identical while the initial ranges differ, the individual times-to-go (= range / closing rate) necessarily differ; the perpendicular components are stated only to null normal overload and do not compensate for timing mismatch. Because this range-reduction property is presented as the mechanism that replaces explicit time-to-go computation, the claim is load-bearing for the headline result.
Authors: We agree that the abstract phrasing is imprecise and potentially misleading for unequal initial ranges. The two-point boundary-value formulation incorporates boundary conditions chosen to enforce simultaneous arrival; the distributed implementation propagates this coordination via the spanning-tree topology. Nevertheless, describing the LOS components as reducing distance 'at the same speed' does not correctly capture the mechanism when ranges differ. We will revise the abstract (and the corresponding sentence in the introduction) to state the mechanism accurately without relying on that wording. revision: yes
-
Referee: [Abstract] Abstract (final sentence) and throughout: the verification statement 'Simulation results verified the practicability of the novel guidance laws' supplies no information on initial conditions (in particular whether ranges are identical), network topology realization, baseline comparators, error metrics, or Monte-Carlo statistics. Without these details the distributed claim and the range-equalization property cannot be assessed.
Authors: We accept that the abstract's verification statement is too terse. In the revised manuscript we will expand the abstract to mention representative initial conditions (including unequal ranges), the directed spanning-tree topologies employed, and the quantitative metrics used. The simulation section will be augmented with explicit descriptions of the network realizations, performance statistics, and any comparative runs. revision: yes
Circularity Check
No significant circularity; derivation relies on standard two-point boundary value methods
full rationale
The paper designs distributed guidance laws via two-point boundary value problems to enforce cooperative attack conditions under a directed spanning tree network. The stated LOS-component property (reducing relative distances at equal speed) is presented as an outcome of that design rather than a self-referential definition or a fitted parameter renamed as a prediction. No self-citation load-bearing steps, uniqueness theorems imported from the authors' prior work, or ansatzes smuggled via citation appear in the abstract or described chain. The central result therefore remains independent of its own inputs and is self-contained against external optimal-control benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The multi-attacker communication network contains a directed spanning tree.
- domain assumption At least one attacker can observe the target.
Reference graph
Works this paper leans on
-
[1]
Distributed guidance law design for cooperative simultaneous attacks with multiple missiles,
Zhou, J., and Y ang, J., “Distributed guidance law design for cooperative simultaneous attacks with multiple missiles,” Journal of Guidance Control and Dynamics , V ol.39, No.10, 2016, pp. 1–9
work page 2016
-
[2]
Hou, D., Wang, Q., Sun, X., and Dong, C., “Finite-time coo perative guid- ance laws for multiple missiles with acceleration saturati on constraints,” Control Theory and Applications Iet , V ol.9, No.10, 2015, pp. 1525–1535
work page 2015
-
[3]
Wang, X., Zhang, Y ., and Wu, H., “Distributed cooperativ e guidance of multiple anti-ship missiles with arbitrary impact angle constraint,” Aerospace Science and Technology , V ol.46, 2015, pp. 299–311
work page 2015
-
[4]
Simultaneous attack of a s tationary target using multiple missiles, a consensus-based approach,
Zhou, J., Y ang, J., and Li, Z., “Simultaneous attack of a s tationary target using multiple missiles, a consensus-based approach,” Science China Information Sciences , V ol.60, No.7, 2017, pp. 67–80. TABLE II SIMULATION PARAMETERS OF THE TARGET T argetx, km T arget y, km σ T , rad 6.5000 0.5000 1.0472 JOURNAL OF LATEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2015 11
work page 2017
-
[5]
Unified approach to cooperative g uidance laws against stationary and maneuvering targets,
Zhao, J., and Zhou,R., “Unified approach to cooperative g uidance laws against stationary and maneuvering targets,” Nonlinear Dynamics, V ol.81, No.4, 2015, pp. 1635–1647
work page 2015
-
[6]
Consensus seeking in multi age nt systems under dynamically changing interaction topologies,
Ren, W., and Beard, R. W., “Consensus seeking in multi age nt systems under dynamically changing interaction topologies,” IEEE Trans. on Automatic Control, V ol.50, No.5, 2005, 655–661
work page 2005
-
[7]
Second-order c onsensus for multiagent systems with directed topologies and nonlinear dynamics,
Y u, W., Chen, G., Cao, M., and Kurths, J., “Second-order c onsensus for multiagent systems with directed topologies and nonlinear dynamics,” IEEE Trans. on Systems Man and Cybernetics Part B Cybernetic s A Publication of the IEEE Systems Man and Cybernetics Society , V ol.40, No.3, 2010, 881–891
work page 2010
-
[8]
Li Z, Chen MZQ and Ding Z., “Distributed adaptive control lers for cooperative output regulation of heterogeneous agents ove r directed graphs,” Automatica 2016; 68: 179-183
work page 2016
-
[9]
Distributed guida nce for interception by using multiple rotary-wing unmanned aeria l vehicles,
Bing, Z., Zaini, A. H. B., and Xie, L., “Distributed guida nce for interception by using multiple rotary-wing unmanned aeria l vehicles,” IEEE Transactions on Industrial Electronics , V ol.64, No.7, 2017, pp. 5648–5656
work page 2017
-
[10]
Song, Q., Liu, F., Wen, G., Cao, J., and Y ang, X., “Distri buted position-based consensus of second-order multiagent syst ems with contin- uous/intermittent communication,” IEEE Trans. on Cybernetics , V ol.47, No.8, 2017, pp. 1860–1871
work page 2017
-
[11]
Modified pure proportional naviga tion guidance law for impact time control,
Cho, N., and Kim, Y ., “Modified pure proportional naviga tion guidance law for impact time control,” Journal of Guidance Control and Dynamics , V ol. 39, No. 4, 2016, pp. 1–21
work page 2016
-
[12]
Sliding mode guidanc e law for impact time control without explicit time-to-go estima tion,
Kim, H. G., Cho, D., and Kim, H. J., “Sliding mode guidanc e law for impact time control without explicit time-to-go estima tion,” IEEE Transactions on Aerospace and Electronic Systems , V ol.55, No.1, 2019, pp. 236–250
work page 2019
-
[13]
Interception ang le control guidance using proportional navigation with error feedbac k,
Lee, C. H., Kim, T. H., and Tahk, M. J., “Interception ang le control guidance using proportional navigation with error feedbac k,” Journal of Guidance Control and Dynamics , V ol. 36, No. 5, 2013, pp. 1556–1561
work page 2013
-
[14]
Effects of time-t o-go errors on performance of optimal guidance laws,
Lee, C. H., Kim, T. H., and Tahk, M. J., “Effects of time-t o-go errors on performance of optimal guidance laws,” IEEE Transactions on Aerospace and Electronic Systems , V ol.51, No.4, 2015, pp. 3270–3281
work page 2015
-
[15]
Active tar get defense using first order missile models,
Garcia, E., Casbeer, D. W., and Pachter, M., “Active tar get defense using first order missile models,” Automatica, V ol. 78, 2017, pp.139–143
work page 2017
-
[16]
Guidance laws ba sed on optimal feedback linearization pseudocontrol with time-to-go est imation,
Alkaher, D., Moshaiov, A., and Or,Y ., “Guidance laws ba sed on optimal feedback linearization pseudocontrol with time-to-go est imation,” Journal of Guidance Control and Dynamics , V ol.37, No.4, 2014, pp. 1298–1305
work page 2014
-
[17]
Ghapani, S., Rahili, S., and Ren, W., “Distributed aver age tracking of physical second-order agents with heterogeneous unknown n onlinear dy- namics without constraint on input signals,” IEEE Trans. on Cybernetics , 2018, advance online publication
work page 2018
-
[18]
Distributed convex optimizat ion for continuous- time dynamics with time-varying cost functions,
Rahili, S., and Ren, W., “Distributed convex optimizat ion for continuous- time dynamics with time-varying cost functions,” IEEE Trans. on Auto- matic Control, V ol.62, No.4, 2017, pp. 1590–1605
work page 2017
-
[19]
Leader -to-Formation Stability of Multi-Agent Systems: An Adaptive Optimal Cont rol Ap- proach,
Gao, W., Jiang, Z. P ., Lewis, F. L., and Wang, Y ., “Leader -to-Formation Stability of Multi-Agent Systems: An Adaptive Optimal Cont rol Ap- proach,” IEEE Trans. on Automatic Control , V ol.63, No.10, 2018, pp. 3581–3587
work page 2018
-
[20]
Optimal cooperative guidance law for salvo attack: an MPC-based con sensus perspective,
Kang, S., Wang, J., Li, G., Shan, J., and Petersen, I.R., “Optimal cooperative guidance law for salvo attack: an MPC-based con sensus perspective,” IEEE Transactions on Aerospace and Electronic Systems , V ol.54, No.5, 2018, pp. 2397–2410
work page 2018
-
[21]
Guidance Law Design for Impact T ime Attack Against Moving Targets,
Zhou, J., and Y ang, J., “Guidance Law Design for Impact T ime Attack Against Moving Targets,” IEEE Transactions on Aerospace and Elec- tronic Systems, V ol.54, No.5, 2018, pp.2580–2589
work page 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.