SpliceRadar: A Learned Method For Blind Image Forensics
Pith reviewed 2026-05-25 14:40 UTC · model grok-4.3
The pith
A deep learning method localizes image splices without knowing the camera model.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
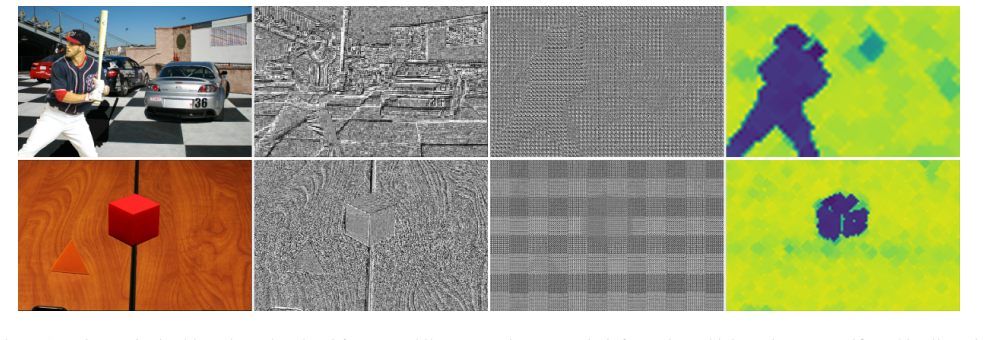
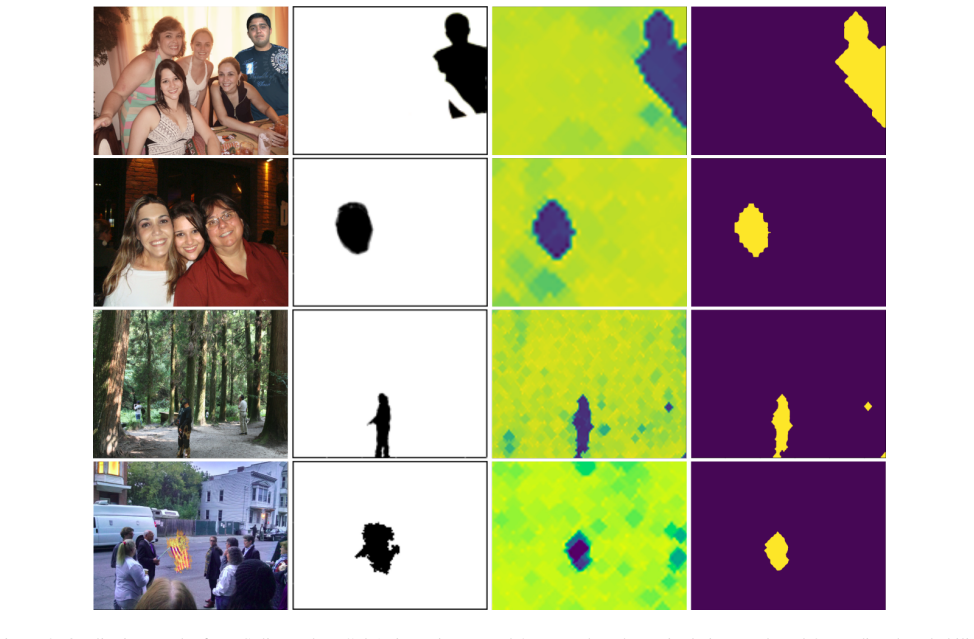
We propose a deep learning based method for splice localization without prior knowledge of a test image's camera-model. It comprises a novel approach for learning rich filters and for suppressing image-edges. Additionally, we train our model on a surrogate task of camera model identification, which allows us to leverage large and widely available, unmanipulated, camera-tagged image databases. During inference, we assume that the spliced and host regions come from different camera-models and we segment these regions using a Gaussian-mixture model.
What carries the argument
Convolutional network trained on camera model identification as surrogate task, with learned rich filters and edge suppression, followed by Gaussian mixture model segmentation of feature maps at inference.
If this is right
- Enables splice localization on images from unknown cameras.
- Uses abundant unmanipulated camera-tagged images for training instead of scarce manipulated examples.
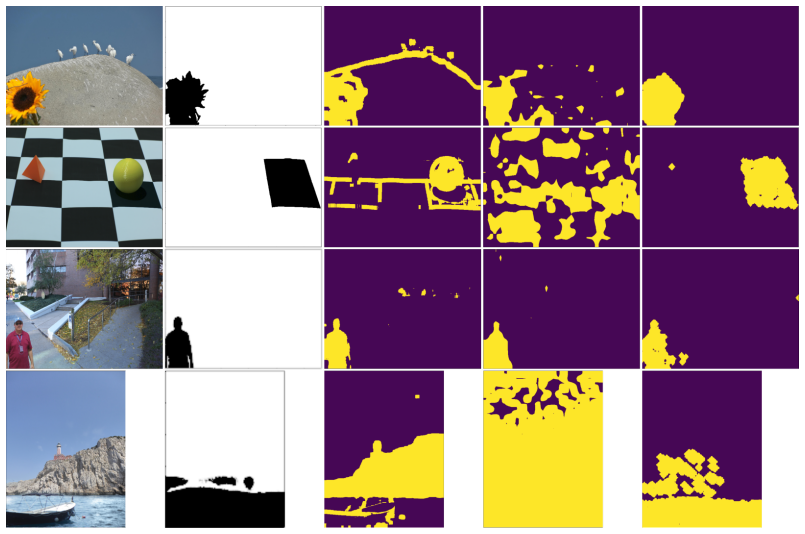
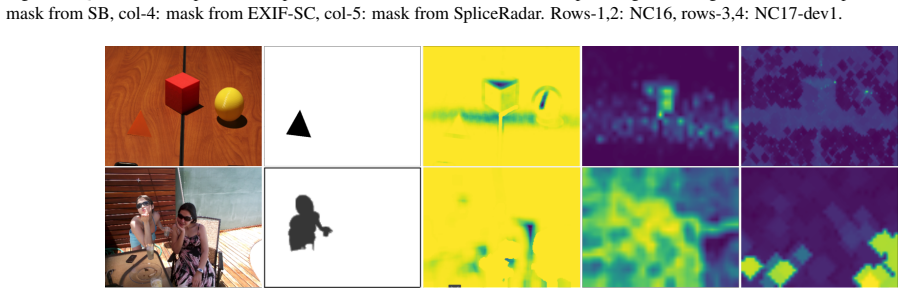
- Achieves results on par with or above the state-of-the-art on three test databases.
- Generalizes to unknown datasets.
Where Pith is reading between the lines
- Camera model features extracted this way could serve as a starting point for other blind forensic tasks.
- The method would likely require a different segmentation step if more than two source cameras are present.
- Success depends on the distinctiveness of camera signatures even after splicing operations.
Load-bearing premise
Spliced and host regions in a test image come from different camera models.
What would settle it
Performance collapse on a dataset of splices where both regions are taken from the same camera model.
Figures

read the original abstract
Detection and localization of image manipulations like splices are gaining in importance with the easy accessibility of image editing softwares. While detection generates a verdict for an image it provides no insight into the manipulation. Localization helps explain a positive detection by identifying the pixels of the image which have been tampered. We propose a deep learning based method for splice localization without prior knowledge of a test image's camera-model. It comprises a novel approach for learning rich filters and for suppressing image-edges. Additionally, we train our model on a surrogate task of camera model identification, which allows us to leverage large and widely available, unmanipulated, camera-tagged image databases. During inference, we assume that the spliced and host regions come from different camera-models and we segment these regions using a Gaussian-mixture model. Experiments on three test databases demonstrate results on par with and above the state-of-the-art and a good generalization ability to unknown datasets.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes SpliceRadar, a CNN-based method for blind splice localization that requires no prior camera-model knowledge of the test image. A network is trained on the surrogate task of camera-model identification using large unmanipulated datasets; the architecture includes novel components for learning rich filters and suppressing image edges. At inference the learned features are clustered with a GMM under the explicit assumption that spliced and host regions originate from different camera models. Experiments on three test databases are claimed to match or exceed prior SOTA while showing good generalization to unknown data.
Significance. The surrogate-task strategy that exploits abundant camera-tagged data is a clear strength and could meaningfully advance blind forensics if the empirical claims are substantiated. However, the load-bearing inference assumption (different camera models) is unvalidated in the provided description, which limits the assessed significance until addressed.
major comments (2)
- [Abstract] Abstract: the localization pipeline rests on the assumption that 'the spliced and host regions come from different camera-models' followed by GMM segmentation, yet no experiment, ablation, or analysis is described that tests feature separability when this assumption is violated or quantifies how often real-world splices satisfy it.
- [Abstract] Abstract: the claim that experiments 'demonstrate results on par with and above the state-of-the-art' supplies no metrics, baselines, error bars, dataset sizes, or ablation results, preventing any assessment of the central empirical claim.
Simulated Author's Rebuttal
We thank the referee for the constructive comments highlighting the central assumption and the need for clearer empirical support in the abstract. We respond to each point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the localization pipeline rests on the assumption that 'the spliced and host regions come from different camera-models' followed by GMM segmentation, yet no experiment, ablation, or analysis is described that tests feature separability when this assumption is violated or quantifies how often real-world splices satisfy it.
Authors: The assumption is stated explicitly as a design choice for blind localization. We agree that testing feature separability under violation (same-camera splices) is valuable and will add a controlled ablation on the test sets by artificially creating same-model splices to measure degradation. A full quantification of real-world splice statistics is difficult without a dedicated provenance dataset, but we will add discussion referencing prior forensics literature on cross-camera splicing prevalence. revision: yes
-
Referee: [Abstract] Abstract: the claim that experiments 'demonstrate results on par with and above the state-of-the-art' supplies no metrics, baselines, error bars, dataset sizes, or ablation results, preventing any assessment of the central empirical claim.
Authors: Abstracts are space-limited and serve as summaries; the full Experiments section reports the metrics, baselines, dataset sizes (three test databases), and comparisons. We will revise the abstract to include key quantitative highlights (e.g., F1 scores and dataset names) while remaining within length limits. revision: yes
- A rigorous quantification of how frequently real-world splices satisfy the different-camera-model assumption would require a large-scale study of verified manipulated images with camera metadata, which is not feasible within this work.
Circularity Check
No significant circularity; derivation relies on external data and standard clustering
full rationale
The paper trains a CNN on the surrogate task of camera-model identification using large external camera-tagged databases of unmanipulated images. At inference it applies a standard Gaussian-mixture model to the learned features under an explicitly stated assumption that spliced and host regions originate from different camera models. No equations, fitted parameters, or predictions are shown to reduce by construction to the method's own inputs. No self-citations are invoked as load-bearing uniqueness theorems or ansatzes. The central claims therefore remain independent of the paper's own outputs and rest on external benchmarks and conventional post-processing.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
S. Agarwal and H. Farid. Photo forensics from JPEG dim- ples. In 2017 IEEE Workshop on Information Forensics and Security (WIFS), pages 1–6, 12 2017
work page 2017
-
[2]
J. H. Bappy, A. K. Roy-Chowdhury, J. Bunk, L. Nataraj, and B. S. Manjunath. Exploiting spatial structure for localizing manipulated image regions. In The IEEE International Con- ference on Computer Vision (ICCV), 10 2017
work page 2017
- [3]
-
[4]
B. Bayar and M. C. Stamm. Augmented convolutional fea- ture maps for robust CNN-based camera model identifica- tion. In 2017 IEEE International Conference on Image Pro- cessing (ICIP), pages 4098–4102, 09 2017
work page 2017
-
[5]
B. Bayar and M. C. Stamm. Constrained convolutional neu- ral networks: A new approach towards general purpose im- age manipulation detection. IEEE Transactions on Informa- tion Forensics and Security, 13(11):2691–2706, 11 2018
work page 2018
- [6]
- [7]
-
[8]
M. Chen, J. Fridrich, M. Goljan, and J. Luks. Determining image origin and integrity using sensor noise. Information Forensics and Security, IEEE Transactions on, 3:74 – 90, 04 2008
work page 2008
-
[9]
D. Cozzolino, G. Poggi, and L. Verdoliva. Splicebuster: A new blind image splicing detector. In 2015 IEEE Inter- national Workshop on Information Forensics and Security (WIFS), pages 1–6, 11 2015
work page 2015
-
[10]
D. Cozzolino, G. Poggi, and L. Verdoliva. Recasting residual-based local descriptors as convolutional neural net- works: An application to image forgery detection. In Pro- ceedings of the 5th ACM Workshop on Information Hiding and Multimedia Security , pages 159–164, New York, NY , USA, 2017. ACM
work page 2017
-
[11]
D. Cozzolino, J. Thies, A. R ¨ossler, C. Riess, M. Nießner, and L. Verdoliva. Forensictransfer: Weakly-supervised domain adaptation for forgery detection. arXiv, 2018
work page 2018
-
[12]
D. Cozzolino and L. Verdoliva. Noiseprint: a CNN-based camera model fingerprint. arXiv, 2018
work page 2018
-
[13]
T. J. d. Carvalho, C. Riess, E. Angelopoulou, H. Pedrini, and A. d. R. Rocha. Exposing digital image forgeries by illumi- nation color classification. IEEE Transactions on Informa- tion Forensics and Security, 8(7):1182–1194, 07 2013
work page 2013
- [14]
-
[15]
J. Fridrich and J. Kodovsky. Rich models for steganalysis of digital images. IEEE Transactions on Information Forensics and Security, 7(3):868–882, 06 2012
work page 2012
-
[16]
T. Gloe and R. Bhme. The ‘Dresden Image Database’ for benchmarking digital image forensics. In Proceedings of the 25th Symposium On Applied Computing (ACM SAC 2010) , volume 2, pages 1585–1591, 2010
work page 2010
-
[17]
K. He, X. Zhang, S. Ren, and J. Sun. Deep residual learning for image recognition. InThe IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 770–778, 06 2016
work page 2016
-
[18]
M. Huh, A. Liu, A. Owens, and A. A. Efros. Fighting fake news: Image splice detection via learned self-consistency. In V . Ferrari, M. Hebert, C. Sminchisescu, and Y . Weiss, edi- tors, Computer Vision – ECCV, pages 106–124, Cham, 2018. Springer International Publishing
work page 2018
- [19]
-
[20]
F. Maes, D. Vandermeulen, and P. Suetens. Medical image registration using mutual information. Proceedings of the IEEE, 91(10):1699–1722, 10 2003
work page 2003
-
[21]
O. Mayer and M. C. Stamm. Learned forensic source sim- ilarity for unknown camera models. In IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). IEEE SigPort, 2018
work page 2018
-
[22]
A. C. Popescu and H. Farid. Exposing digital forgeries in color filter array interpolated images. IEEE Transactions on Signal Processing, 53(10):3948–3959, 10 2005
work page 2005
-
[23]
T. Qiao, F. Retraint, R. Cogranne, and T. H. Thai. Individ- ual camera device identification from JPEG images. Signal Processing: Image Communication, 52:74 – 86, 2017
work page 2017
-
[24]
A. R ¨ossler, D. Cozzolino, L. Verdoliva, C. Riess, J. Thies, and M. Nießner. Faceforensics++: Learning to detect ma- nipulated facial images. arXiv, 2019
work page 2019
-
[25]
R. Salloum, Y . Ren, and C.-C. J. Kuo. Image splicing localization using a multi-task fully convolutional network (MFCN). Journal of Visual Communication and Image Rep- resentation, 51:201 – 209, 2018
work page 2018
-
[26]
K. San Choi, E. Lam, and K. Wong. Source camera identi- fication by JPEG compression statistics for image forensics. In IEEE Region Conf. TENCON, pages 1 – 4, 12 2006
work page 2006
-
[27]
M. Zampoglou, S. Papadopoulos, and I. Kompatsiaris. Large-scale evaluation of splicing localization algorithms for web images. Multimedia Tools and Applications, 09 2016
work page 2016
-
[28]
P. Zhou, X. Han, V . I. Morariu, and L. S. Davis. Learn- ing rich features for image manipulation detection. In The IEEE Conference on Computer Vision and Pattern Recogni- tion (CVPR), pages 1053–1061, 06 2018. 4328
work page 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.